
激光捷联导引头半实物仿真合成视线法研究
2018-10-26 05:41王艳奎
激光与红外 2018年10期
王艳奎,郑 强,姬 爽
(1.中国空空导弹研究院,河南 洛阳 471009;2.航空制导武器航空科技重点实验室,河南 洛阳 471009)
1 引 言
激光制导半实物仿真是对激光导引头和激光制导武器性能设计和评价的有效手段[1-2]。目前工程上对激光制导半实物仿真系统的设计根据视线运动模拟方法的不同主要有两种实现方案,一种方案是基于五轴转台和激光目标模拟器的透射式系统设计方案,该方案中通过五轴转台模拟导弹的姿态运动和弹目视线运动[3-4],通过激光目标模拟器模拟被攻击目标的激光漫反射特性;另一种方案是基于漫反射屏和三轴转台的反射式系统设计方案,该方案中由三轴飞行转台模拟导弹的姿态运动,由漫反射屏幕模拟目标对指示激光的漫反射特性,并通过二维摆镜控制目标光斑在漫反射屏幕上的运动来模拟目标相对导弹的视线运动[5-6]。
针对大视场激光捷联导引头的性能测试和仿真需求来说,由于导引头和弹体是捷联的,空地激光制导武器为了增射程和提高弹道落角的弹道需求导致导弹攻击过程中姿态角范围变化较大,这就要求仿真系统必需有足够的视线运动模拟范围[7]。由激光制导半实物仿真系统的两种实现方案可以看出,共同点是导弹姿态的运动模拟和弹目视线运动的模拟是独立实现的。其中,透射式仿真方案的不足是由于激光捷联导引头大视场和测角特性对激光目标模拟器能量的高均匀性和大出瞳孔径的模拟需求导致激光模拟器的设计难度较大,这导致五轴转台目标框架大角度范围的高动态运动模拟和激光模拟器的设计很难兼顾,同时目标模拟器激光能量的均匀性也很难满足仿真需求;反射式仿真方案的不足是为了满足大角度视线运动的模拟,要求漫反射屏幕对转台回转中心的张角范围必须与导弹姿态变化和导引头视场范围相互匹配[8],而受限于漫反射屏尺寸大小、试验设备布局及仿真系统建设成本的限制,弹目视线的大范围变化模拟也很难满足要求。
综上,在目前的激光制导半实物仿真系统框架下,满足捷联导引头大姿态角变化范围仿真的系统试验能力是极其有限的。在此基础上,本文提出反射式系统中实现基于合成视线的激光捷联导引头视线模拟方法,以扩展提升激光制导仿真系统的试验能力。
2 合成视线原理分析
合成视线是通过将目标相对导弹的运动和导弹的姿态运动复合成三轴转台的运动来构建等效的导引头探测角度,合成的等价条件是试验室内仿真视线相对导引头探测器坐标系的角度与导弹实际飞行过程中弹目视线相对探测器坐标系的角度相等。在反射式系统中,合成视线法仿真原理如图1所示。假设在反射式仿真系统中激光漫反射屏幕距离转台回转中心的距离为H,转台回转中心和漫反射屏幕中心连线与漫反射屏幕垂直,系统中的主要仿真设备包括:漫反射屏幕、三轴转台、激光模拟分系统、仿真模型解算计算机、二维摆镜、实时光纤网及仿真总控系统。
基于合成视线法的弹道仿真过程中,激光模拟分系统首先通过实时光纤网获取导弹飞行过程中导弹和目标的位置、速度及姿态信息,然后根据这些外弹道参数先完成激光器出射能量和光斑变换后再将激光投射到二维摆镜上,仿真模型解算计算机通过控制摆镜角度将目标指示光斑投射到漫反射屏幕的中心,弹道仿真过程中保持二维摆镜的角度不变,确保激光光斑始终位于漫反射屏幕的中心。仿真模型解算计算机根据导弹的姿态和弹目相对位置信息进行仿真视线的合成解算,然后控制三轴转台完成弹目合成视线运动的模拟。

图1 合成视线仿真示意图Fig.1 Synthetic line-of-sight simulation
由于受导引头结构的影响,导引头安装到三轴转台内框上时探测器中心无法与转台回转中心在轴向方向完全重合。假设导引头探测器中心距离转台回转中心的轴向安装偏差为D,定义光斑相对转台回转中心的连线为名义仿真视线,定义目标光斑和探测器中心的连线为实际仿真视线。如图2所示,当转台转动时,名义仿真视线和实际仿真视线不重合,导致导引头探测器探测到的目标相对弹轴的角度与视线角实际值存在偏差Δ。考虑到弹道仿真过程中仿真误差Δ是导引头理论测角和转台转动角度的函数,所以在设计合成视线算法时需要考虑补偿因安装偏心导致的视线角仿真偏差Δ。
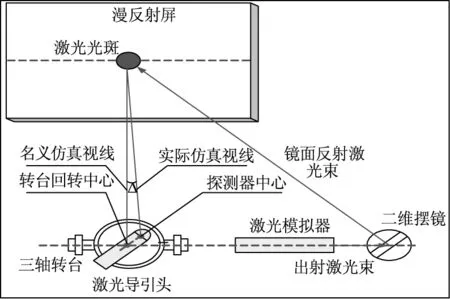
图2 合成视线仿真误差示意图Fig.2 Simulation error of synthetic line-of-sight
3 合成视线仿真建模
如果导引头安装到转台的内框后,探测器中心与转台回转中心重合,则名义仿真视线与实际仿真视线重合,下文将这种情况统称为仿真视线。假设,仿真过程中转台的偏航框角度工作范围为Wk∈(-90°,90°)、转台的俯仰框角度工作范围为Zk∈(-90°,90°)、转台的滚转框角度为Nk=0,则仿真视线在探测器坐标系中的投影为:
x=Hcos(Zk)cos(Wk)y=-Hsin(Zk)cos(Wk)z=Hsin(Wk)
(1)
导引头的视线高低角和方位角定义如图3所示。

图3 视线角定义示意图Fig.3 Line-of-sight angle definition
由图3可知,导引头探测器探测到的高低视线角为α,方位视线角为β。假设,α∈(-15°,15°),β∈(-15°,15°),则仿真视线在探测器坐标系中的投影为:

(2)
由式(2)得:
(3)
考虑到导弹实际飞行过程中视线在弹轴上的投影在导弹遇靶前大于等于0,则由式(3)得:
(4)
将式(4)代入式(2)得:
(5)

(6)

Zk=-atan(tanα)
(7)
根据假设条件得:
Nk=0
(8)
综上,式(6)~(8)即为合成视线法针对激光捷联导引头视线角仿真的理论模型。
4 合成视线仿真误差修正
当考虑到探测器中心与转台回转中心不重合时,名义仿真视线与实际仿真视线不重合,实际仿真视线矢量由名义仿真视线矢量减去安装偏心矢量决定。同理,假设仿真过程中转台的偏航框角度工作范围为Wk∈(-90°,90°)、转台的俯仰框角度工作范围为Zk∈(-90°,90°)、转台的滚转框角度为Nk=0,则实际仿真视线在探测器坐标系中的投影为:
x=Hcos(Zk)cos(Wk)-Dy=-Hsin(Zk)cos(Wk)z=Hsin(Wk)
(9)
假设这时导引头探测器应该探测到的高低视线角为α,方位视线角为β,且α∈(-15°,15°),β∈(-15°,15°),则实际仿真视线在探测器坐标系中的投影为:
(10)

(HcosZkcosWk-D)tanβ+HsinWk=0(HcosZkcosWk-D)tanα+HsinZkcosWk=0
(11)
令sinWk=X,sinZk=Y,结合Wk∈(-90°,90°),Zk∈(-90°,90°)可得:

(12)
将式(12)代入式(11)得:

(13)
将式(13)中上式减下式得:
(14)
1)若β≠0,则由式(14)得:
(15)
将式(15)代入式(13)中上式得:
=Dtanβ
(16)
式中,sign(·)为符号函数。
2)若β=0,则由式(13)得:
X=0
(17)
(18)
综上,式(15)~(18)即为基于合成视线的捷联导引头视线角仿真误差修正模型。由于式(16)和式(18)为非线性方程,无法求出解析解,所以需要选用合适的非线性方程求解方法来求解其数值解。
5 仿真计算
假设建模中转台回转中心到漫反射屏幕中心的距离H为6.35 m。
选择弹道过程中的11组视线角作为仿真条件,具体数值如表1所示,并通过二分法对合成视线仿真及误差修正模型进行求解,具体包括:
1)仿真计算有无安装误差两种情况下,根据合成视线仿真模型将视线合成后的转台运动角度,仿真结果如表2所示。
2)仿真计算安装误差对合成视线法的影响,安装误差导致的合成视线法视线角模拟误差情况如表3所示。
3)仿真计算合成视线仿真误差修正算法对安装误差导致视线角合成误差的修正情况,修正结果如表4所示。
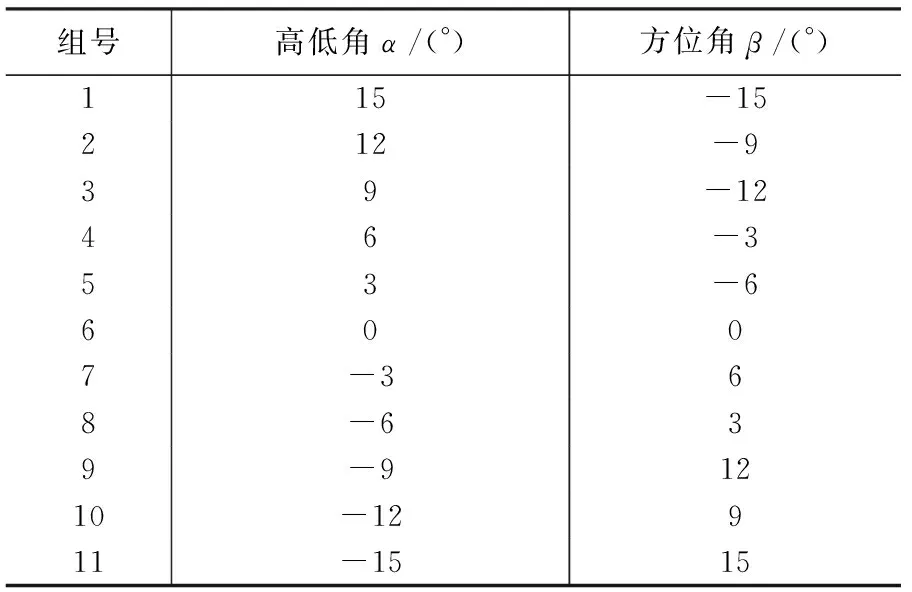
表1 仿真输入参数

表2 仿真结果输出参数
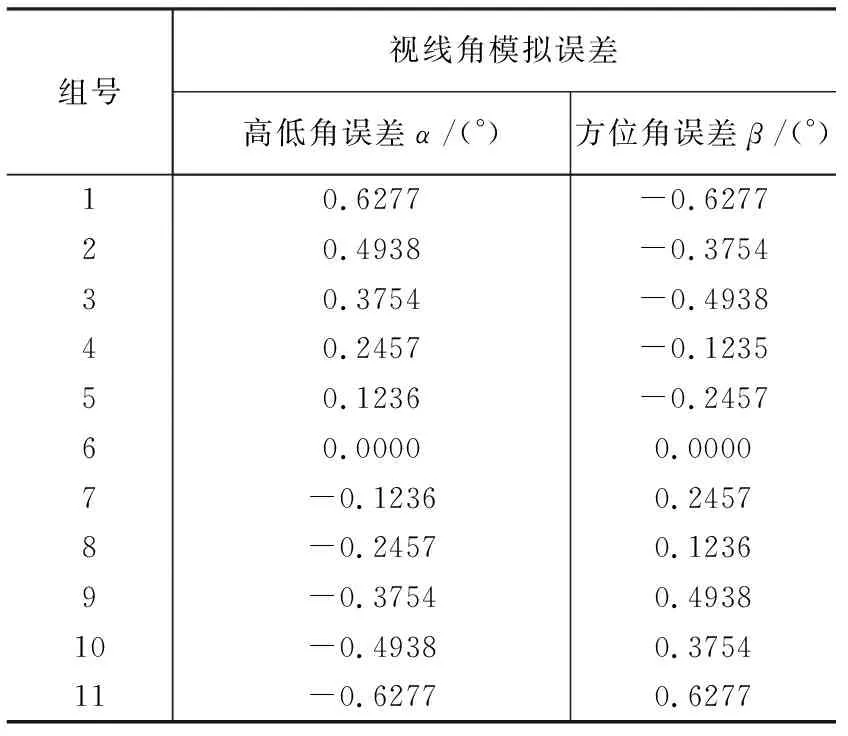
表3 安装误差导致的合成视线视线角模拟误差
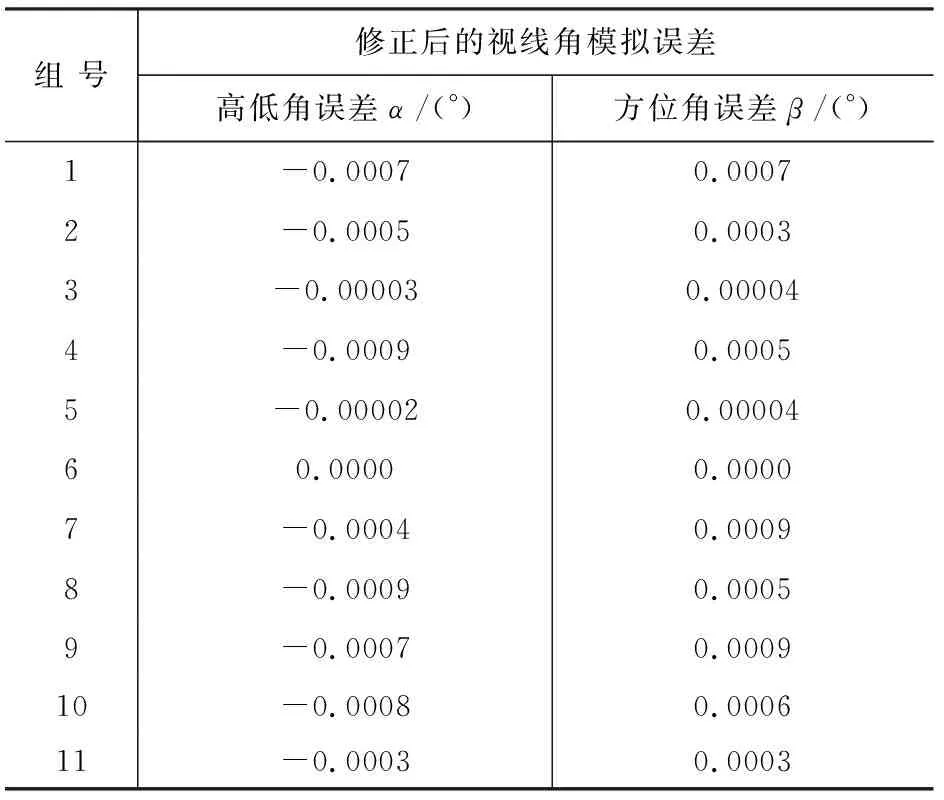
表4 经误差修正算法修正后的视线角模拟误差
6 结 论
从仿真计算结果可以看出:
1)合成视线方法能够有效解决激光捷联导引头视线角变化范围大导致的仿真系统能力受限问题,该方法对提高激光捷联制导半实物仿真系统的试验能力有重要意义;
2)合成视线算法中探测器中心和转台回转中心的轴向安装偏差会导致合成视线角的仿真精度下降,并且随着仿真视线角的增加合成视线误差也会急剧增大;
3)通过合成视线仿真误差修正算法能够有效补偿因安装偏差导致的失调角模拟误差,经合成视线仿真误差修正模型修正后的合成视线角模拟精度较高,能够满足工程应用需求。
猜你喜欢
特区文学·诗(2021年6期)2021-12-22
金色少年(奇趣科普)(2017年11期)2017-11-28
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
当代贵州(2015年19期)2015-06-13
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
岷峨诗稿(2014年3期)2014-11-15
