
全站仪目标自动识别与照准方法研究
2018-11-02 05:23王欣宇刘豪杰范百兴
测绘工程 2018年11期
王欣宇,刘豪杰,范百兴
(1.黄河勘测规划设计有限公司,河南 郑州 450000;2.信息工程大学,河南 郑州 450001;3.苏州一光仪器有限公司,江苏 苏州 215006)
全站仪从诞生、发展及以后的趋势,始终代表着地面测量对自动化的不断追求。计算机技术的深入应用可完成数据、图形、图像处理等任务;马达驱动全站仪的出现使全站仪向着自动化发展迈进一步,在此基础上,在望远镜照准系统里安置CCD/CMOS传感器,实现自动照准,能够快速自动照准目标,标志着全站仪开始向智能化发展,即测量机器人[1-7]。国外的自动化全站仪已经成熟,如徕卡公司在1994年推出TPS1000系列测量机器人[6];而国内的自动化全站仪也在不断发展,本文采用CMOS传感器与RTS010A全站仪组合,以实现自动目标识别测量系统为目的进行研究。
1 全站仪自动目标识别与照准原理
全站仪自动目标识别系统[8-12]是在马达全站仪望远镜内置CCD/CMOS传感器,通过主动发射与望远镜同轴的红外激光经目标棱镜返回,返回的红外光束打在CCD/CMOS阵列上,光点位置以CCD/CMOS传感器中心作为参考点来精确确定,通过图像处理提取光点中心的像素坐标,从而确定其在图像中的位置,再将图像的位置信息转化为全站仪旋转的角度信息,由伺服系统控制全站仪转动相应的角度,实现自动照准与跟踪。自动目标识别系统如图1所示。

图1 自动目标识别系统
目标识别:全站仪的观测目标是角锥棱镜, CCD/CMOS传感器接收到经目标棱镜反射回的照准光斑,对CCD/CMOS所获取的光斑图像进行处理,计算光斑中心在图像中的位置。
自动照准: CCD/CMOS传感器经图像处理计算出光点偏离CCD/CMOS阵列中心(即目标棱镜中心)的偏离量,将偏离量转换为望远镜旋转角度后通过马达驱动望远镜按该偏离量移向棱镜中心,当望远镜十字丝中心和棱镜中心的偏离量在设定限差之内后,望远镜停止运动,自动目标识别系统测量十字丝中心和棱镜中心间的水平和垂直偏离量,对水平角和垂直角进行改正计算,从而得到目标棱镜中心的精确值。
本文采用RTS010A全站仪,通过上述部件组合瞄准目标棱镜后发射红外光源,反射的光斑呈现在CMOS阵列上,由计算机连接CMOS进行图像采集,如图2所示。

图2 CMOS传感器与全站仪组合采集图像
2 自动目标识别全站仪光斑图像处理
通过计算机连接CMOS传感器获取的光斑图像及其灰度分布图像如图3、图4所示。

图3 光斑原始图像

图4 光斑图像灰度三维分布图
经分析光斑图像具有以下特征:①图像为背景黑暗灰度值较小而目标光斑明亮灰度值较大的“准二值图像”;②光斑呈类圆形;③图像中的光斑大小随目标棱镜与望远镜间的距离增加而逐渐减小;4)图像光斑边缘有散光现象,使光斑边缘不圆滑,出现大量毛刺,边缘灰度分布不均匀,边缘灰度梯度非常大,光斑中心及背景灰度均匀,灰度值三维图呈圆台分布。
2.1 光斑图像预处理
根据光斑图像的特征,首先对图像进行预处理,再进行图像光斑的中心定位;由于望远镜在发射红外激光前后光斑图像背景特征基本不变,只有光斑位置灰度变化明显,所以本文考虑在望远镜发射红外激光前后分别采集目标图像,即可得到一张带有红外激光光斑的图像和一张纯背景图像,将两张图像进行相减计算即可得到背景黑暗的光斑图像,如图5所示。
通过图像相减去除非棱镜光斑带来的噪声影响,但仍存在边缘毛刺的影响,光斑图像不是规则的圆形,影响中心定位的精度;在此基础上,本文通过直接预处理方法对图像进行滤波,经分析比较,为既能进一步弱化边界信息,减小边缘毛刺对中心定位的影响,同时又保证边缘定位的一定精度,宜采用均值滤波3×3模板进行滤波[13-14];滤波效果如图6所示。

图5 自动目标识别系统红外光前后相减效果图

图6 3×3均值滤波模板滤波效果图
图像相减法损害了光斑特征信息,但光斑灰度梯度变化仍明显,认为没有损害边缘,但是对中心定位结果会有所影响,因为光斑图像未进行相减处理时的灰度分布大都为最大值255呈圆台型,相减处理后光斑灰度不呈圆台型,但仍不影响其梯度特征。可通过记录图像相减之前光斑图像灰度值为255的像素坐标,将相减之后图像光斑相应像素坐标处的灰度值重新设为相减之后光斑灰度分布的最大值,这样即认为恢复了光斑图像的原始信息,呈类似圆形平顶特征,从而减小其对中心定位结果的影响。
2.2 光斑图像中心定位
经过图像预处理的光斑图像仍存在边缘毛刺,通过椭圆拟合的方法去除椭圆以外的散射毛刺,剩余椭圆内像素认为是光斑图像的有效像素,但仍不能完全消除小毛刺对中心定位的影响;由于光斑图像灰度分布越靠近光斑中心附近的灰度值越高,而平方加权重心法[15-16]突出表现了中心像素对光斑图像中心定位结果影响大而边缘像素灰度对光斑图像中心定位结果影响小的特点,所以取图像光斑内各个像素值的灰度值的平方作为各自的权值,通过平方加权灰度重心法对全站仪棱镜光斑图像进行中心定位。其算式为
(1)
其中,f(x,y)为光斑像素灰度值;图像大小为m×n;(x,y)为像素坐标。
3 自动目标识别全站仪系统模型标定
由仪器厂家按照严格的机械结构将CMOS内置于望远镜中,通过全站仪瞄准棱镜,上下左右旋转望远镜,使棱镜的回光光斑始终在CMOS图像阵列范围内,并以此为根据进行图像光斑中心像素坐标与望远镜旋转角的关系的标定。标定主要有两种思路:第一种方法是认为光斑中心像素坐标与望远镜旋转角度之间是线性关系[17],通过线性函数进行标定;第二种方法认为光斑中心像素坐标与望远镜旋转角是非线性关系,通过一定的实验数据建立数学模型。两种标定方法各有优缺点,非线性模型标定是标定图像各个位置处与对应的望远镜旋转角的关系,标定后通过一次旋转便可使望远镜照准目标棱镜;而线性模型标定方法是只标定水平方向和竖直方向像素坐标与望远镜旋转角之间的关系,水平角竖直角通过多次旋转才能精确照准目标棱镜。针对全站仪自动目标识别的用途,并不需要一次计算便可精确照准目标,而是通过多次旋转的循环过程来趋近目标点,而且非线性标定方法标定起来很困难,视场边缘畸变较大,标定精度很难保证,所以通过一次旋转到精确位置很难做到,用非线性标定方法也就失去了意义;基于全站仪自动目标识别的原理,只需让目标不断地靠近视场中心,反复计算与旋转直到角度与目标偏离达到一定限值,最终精确定位即可。所以本文采用线性模型标定方法对全站仪望远镜旋转角和CMOS图像像素坐标进行标定。
由于全站仪的特殊性,其可沿水平和竖直两方向进行角度旋转。因此,标定过程中只需要标定水平角和竖直角分别与像素坐标x,y之间的关系,便可实现任意角度的空间模型标定。由于望远镜视场较小,且全站仪自动目标识别功能是在望远镜大概照准目标棱镜为前提,其自动目标识别是一个循环的过程,计算图像光斑中心的像素坐标,换算为望远镜旋转水平角竖直角,不断驱动全站仪旋转,使望远镜视准轴逐渐靠近目标棱镜光斑中心,即可实现望远镜与目标棱镜的精确照准。所以只需要标定视场内一定范围的关系模型,本文标定120″范围内的系统关系模型。
3.1 CMOS阵列中心标定
标定尽量选取适宜的环境,减少外界光源的干扰而影响标定结果,且距离适中,因为目标棱镜距离CMOS相机太近时回光光斑太大,占用的像素过多,图像处理获取光斑中心点时精度不高,从而影响标定结果;距离太远,回光光斑太小像素分布梯度不均或梯度不明显也会影响光斑中心定位精度,经试验选择至少大于50 m小于500 m的距离进行标定;选择合适的环境后通过人工精确照准目标棱镜,认为此时的目标棱镜中心处于视场正中心,此时图像中回光光斑中心的像素坐标即为CMOS阵列的中心点,为提高精度通过多次测量取均值进行中心点的确定。
3.1.1 CMOS阵列中心标定步骤
首先确定望远镜视准轴在CMOS图像中的位置,即望远镜精确瞄准棱镜时图像光斑中心点的像素坐标值O(x0,y0),本文通过精确照准目标棱镜提取光斑图像的中心点坐标,可通过多次采集图像提取光斑中心像素坐标取平均值作为其精确值。望远镜精确瞄准目标棱镜后,以固定频率采集6张图像并提取中心点像素坐标,精确瞄准后的全站仪水平角设为0°,望远镜竖直角为195°15′51.8″;提取图像光斑中心点坐标,去掉最大值最小值后取平均值作为中心点坐标的精确值,如表1所示,O(x0,y0)=(123.397 4,119.611 5)。

表1 CMOS阵列中心点坐标 像素
3.1.2 CMOS阵列中心标定精度分析
望远镜水平角变化时,回光光斑在图像上的运动轨迹应为一条直线y=kx+b;同理调整望远镜竖直角旋转时,目标棱镜回光光斑在图像上的运动轨迹也应为一条直线。如果CMOS阵列中心标定结果准确,那么两条直线的交点O′应该与CMOS阵列中心O重合,可通过两者之间的坐标偏差值(Δx,Δy)来衡量CMOS阵列中心标定的精度。
由于图像处理过程中光斑图像中心像素坐标的提取受外界光线的干扰,需要考虑光斑的毛刺影响,所以旋转望远镜在每一个方向采集多张光斑图像进行中心提取剔除极值取平均值作为精确值;本文在望远镜每一方向采集6张图片,将6张光斑图像中心坐标的最大值最小值去掉后取平均值作为该方向的光斑图像中心坐标。中心定位结果如表2、表3、图7—图10所示。

表2 竖直角V变化时光斑图像中心提取坐标值

表3 水平角H变化时光斑图像中心提取坐标值

续表3

图7 竖直角变化时图像光斑中心定位

图8 竖直角变化时图像光斑中心定位直线拟合
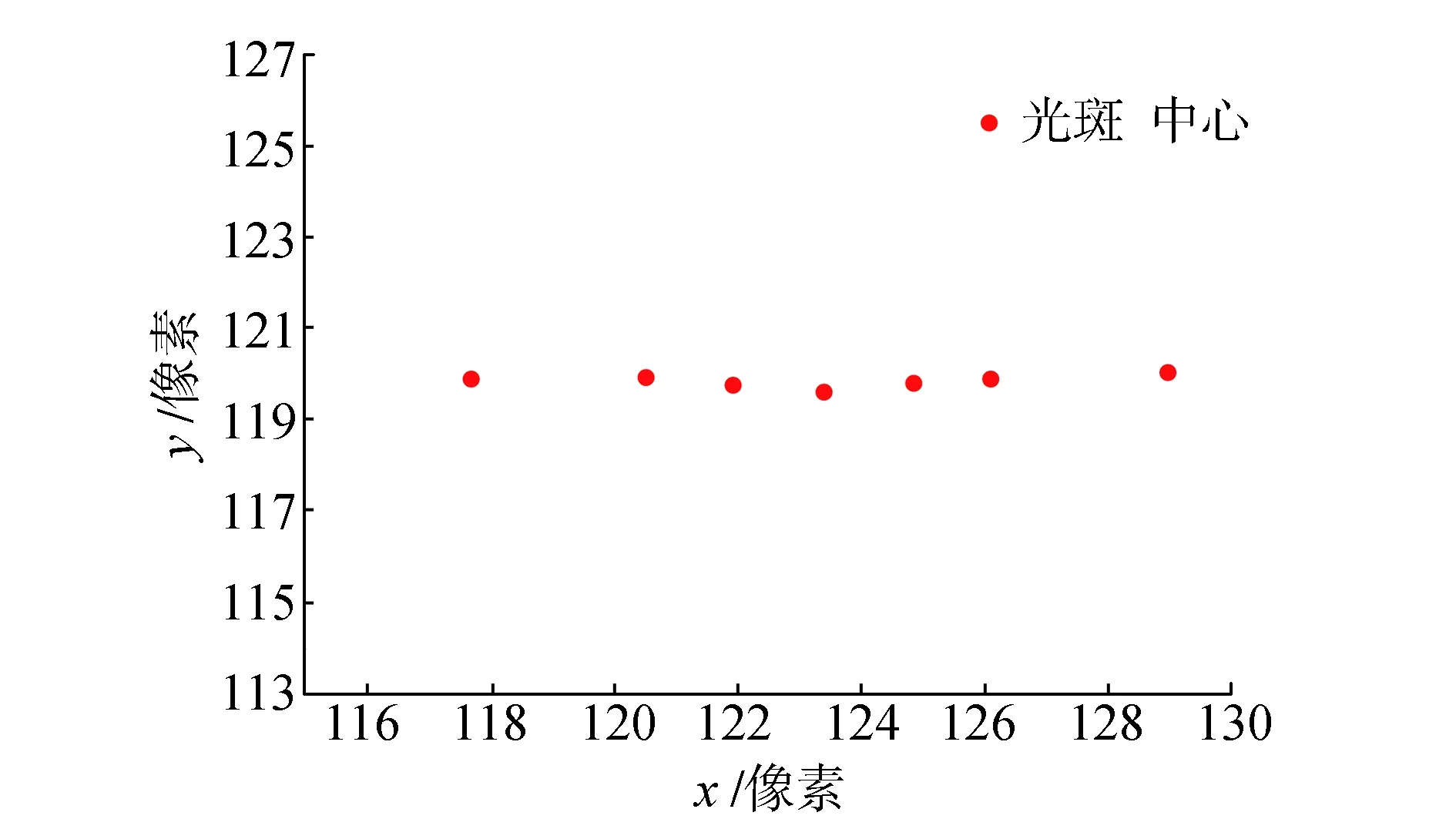
图9 水平角变化时图像光斑中心定位

图10 水平角变化时图像光斑中心定位直线拟合
固定一个方向的角度值,变化另外一个方向的角度,图像光斑中心坐标也随着变化,运动轨迹为一条近似直线;通过固定水平角调整竖直角和固定竖直角调整水平角两种情况可拟合两条直线方程,两条直线方程为

(2)
两直线交点坐标为:O′(x′=123.380 0,y′=119.898 1),两个方向的光斑中心拟合的直线方程的交点理论上应该与CMOS阵列中心坐标O(x0,y0)=(123.397 4,119.611 5)(即望远镜精确瞄准目标棱镜时光斑图像的中心点坐标)相等。
计算得到OO′在水平和竖直方向的偏差值为:Δx=-0.017 4,Δy=0.286 6。经测试发现在水平角不变竖直角变化时x坐标值与CMOS阵列中心坐标x基本相等,在竖直角不变水平角变化时y坐标值与CMOS阵列中心坐标y偏差较大。出现这种现象不难理解,水平角变化影响的是光斑中心像素坐标x的值,竖直角变化影响的是光斑中心像素坐标y的值;测试过程中先选择固定水平角为零调整竖直角,所以对应光斑中心像素坐标x的值没有发生变化;当调整竖直角时,很难再次回到第一次精确瞄准目标棱镜时的初始位置,因此,在调整水平角测试时只能保证调整过程中竖直角不变,不能保证与第一次精确瞄准时初始位置的竖直角相等,有一个微小的角度差值,这样就会造成拟合直线的交点的y坐标与CMOS阵列中心坐标y偏差较大;通过表2和表3可知,这个微小的竖直角变化为0.2″。
因此通过光斑直线拟合定位的x坐标值可以看出光斑直线拟合中心点x坐标与精确瞄准目标棱镜时提取的中心点x坐标相差不到0.02个像素坐标值,即CMOS阵列中心标定精度为0.02个像素坐标,这个精度可以用来进行像素与旋转角间关系的标定。
3.2 自动目标识别系统模型标定
提取各个角度的图像光斑中心坐标像素后,便可以确定像素坐标与旋转角度之间的关系模型;如图11所示,望远镜每转到一个角度对应有一个光斑中心的像素坐标值,且望远镜沿水平和竖直旋转时光斑中心坐标变化基本成线性变化关系,因此可通过线性标定望远镜旋转角度与光斑中心像素坐标之间的关系;只标定水平角与像素坐标x的关系,竖直角与像素坐标y的关系,认为水平角与像素坐标y无关,竖直角与像素坐标x无关。

图11 光斑中心像素坐标值
图像光斑中心像素与望远镜旋转角之间标定最主要的工作便是比例系数的确定,比例系数的确定需要知道望远镜旋转角度值和图像光斑中心像素坐标值,表2和表3已经给出,比例系数通过式(3)进行求解。

(3)
式中:H,V分别为望远镜相对原点(望远镜精确照准目标棱镜时认为是原点)旋转的水平角和竖直角;m,n分别为水平角和竖直角与图像光斑中心坐标之间的比例系数;p,q分别为两方向所拟合的线性关系直线的截距,理论上p,q应等于CMOS阵列中心坐标O(x0,y0)=(123.397 4,119.611 5),实际中会存在误差。角度变化值与光斑中心像素坐标值对应关系如表4所示。
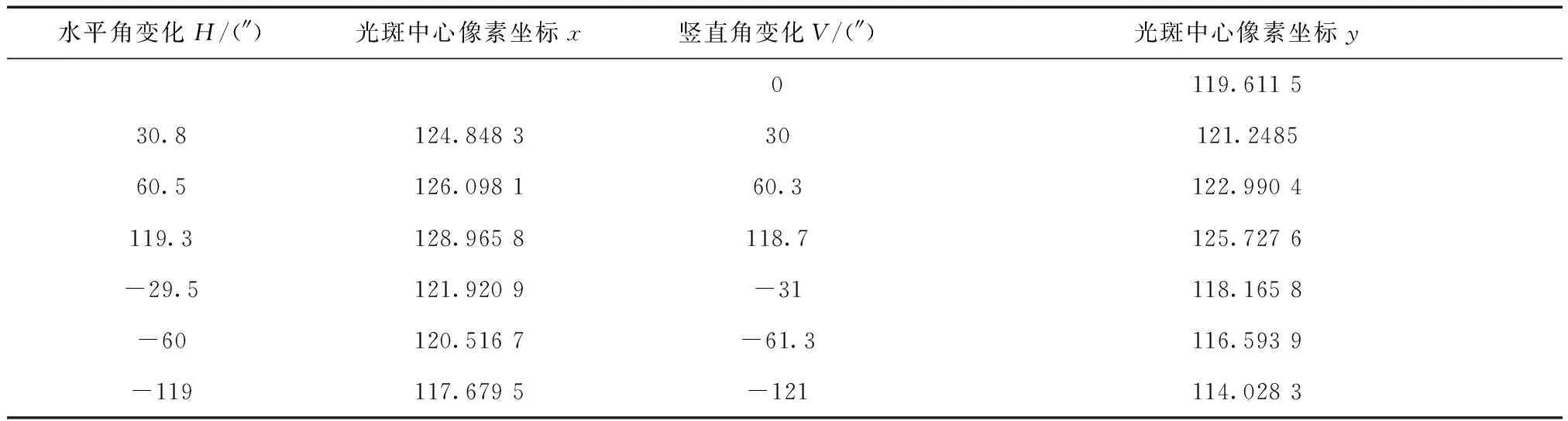
表4 角度变化值与光斑中心像素坐标值
通过对表4中数据进行线性拟合,可求得角度变化值与光斑中心像素坐标之间的各参数如表5所示。

表5 角度与光斑像素间函数参数
望远镜旋转角与图像光斑中心像素坐标之间的函数关系为

(4)
两直线方程的截距p,q与CMOS阵列中心坐标O(x0,y0)=(123.397 4,119.611 5)差值为
(5)
通过式(5)可知,模型标定结果中CMOS阵列中心像素坐标与CMOS阵列中心标定值在水平方向差值小于0.076个像素,在竖直方向相差小于0.186个像素。根据横向比例系数m可知水平角偏差约为1.60″,根据纵向比例系数n可知竖直角偏差约为3.74″。
由图11可注意到,当全站仪望远镜角度旋转到较大的度数时,对光斑图像中心定位结果变化影响较大,影响直线拟合线性关系的精度;为了小范围内更精确的实现自动目标识别,所以只保留小角度旋转的数据,重新进行标定。剔除大角度(120″)旋转时的定位结果后,其光斑图像中心点坐标随角度变化的分布图如图12所示。
剔除表4中对标定结果影响较大的角度变化值120″后进行线性拟合,可求得小角度变化值与光斑中心像素坐标之间的各参数如表6所示。

表6 小角度变化与光斑像素间函数参数
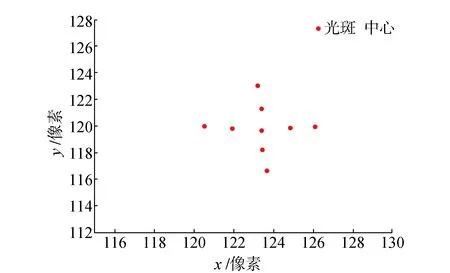
图12 小角度旋转光斑中心像素坐标值
同理,通过剔除大角度旋转角后,计算得望远镜旋转角与图像光斑中心像素坐标之间的函数关系为

(6)
两直线方程的截距p,q与CMOS阵列中心坐标O(x0,y0)=(123.397 4,119.611 5)差值为
(7)
由式(7)可知,通过旋转小角度模型标定结果中CMOS阵列中心像素坐标与CMOS阵列中心标定值在水平方向差值小于0.073个像素像素坐标,在竖直方向差值小于0.132个像素坐标。根据横向比例系数m可知水平角偏差约为1.55″,根据纵向比例系数n可知竖直角偏差约为2.52″。相较于未剔除大角度值进行标定的结果,标定的精度有所提升。
分析发现竖直方向偏差值较大,原因同CMOS阵列中心标定y坐标偏差较大一样,由于固定水平角调整竖直角标定结束后再回到竖直角初始零位时存在归位误差,所以导致再沿水平方向标定时竖直方向(y坐标的值)偏差较大,这个偏差对比例系数的解算精度是几乎没有影响的;可以通过截距p与原点x0的偏差值知其标定精度为0.073个像素坐标。
4 全站仪自动目标识别照准精度分析
4.1 全站仪驱动定位精度分析
全站仪自动目标识别功能是通过马达驱动功能实现的,在测试自动目标识别精度之前首先要保证驱动精度的可靠性,因此先测试全站仪的驱动精度是否满足要求。
马达驱动的精度可以通过人为设置进行改变,可以将马达驱动的精度设置为5″和10″,通过测试马达驱动定位结果是否符合设定精度;将仪器设置一个角度,通过串口指令驱动控制全站仪旋转某个角度测试其驱动误差,设置每次驱动固定角度值为标准值,本文分别预设水平角竖直角均驱动90°、180°、360°为标准值进行测试,每设置一次角度连续驱动5次,观察各次驱动误差是否在设定精度范围内;测试结果如表7和表8所示。

表7 马达驱动精度设为5″时驱动精度测试结果
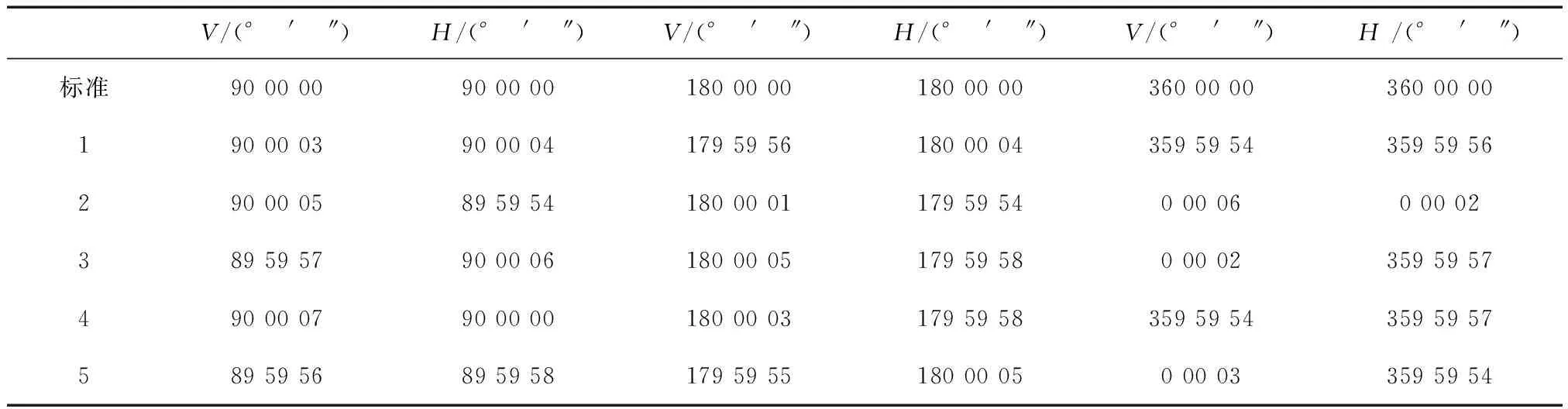
表8 马达驱动精度设为10″时驱动精度测试结果
根据表7和表8可知全站仪马达驱动精度符合设置的精度,两种情况下5次测量结果均在精度设定范围之内。
4.2 自动目标识别照准精度分析
经标定后的自动目标识别全站仪其测量精度是否可靠还需要进行验证,通过人工精确照准测量值作为标准值,自动目标识别系统自动照准读数作为测量值,在照准测量时,目标棱镜和全站仪测站位置保持固定不动,只改变全站仪初始角位置进行反复照准测量,如果照准测量与标准值偏差在驱动精度范围内,则认为自动目标识别系统照准测量精度可靠。本次设定驱动精度为5″,其照准测量结果如表9所示。

表9 自动目标识别照准测量结果
由表9可知自动目标识别照准精度符合驱动定位精度,与人工照准偏差较小,认为自动目标识别测量精度可以代替人工测量精度。
4.3 自动目标识别效率测试
由于测量设备有限,自动目标识别效率测试在全站仪的两个方向上布设两个目标棱镜以达到多个目标棱镜的目的,为使效果明显测量目标棱镜间水平角布设大于30°,将两个目标棱镜定义为棱镜A和棱镜B,全站仪位置定义为O,本次实验变化棱镜B的位置多次试验比较;每次试验对两个棱镜交替测量10个测回,即共精确照准20次;观察自动目标识别测量时间与人工测量时间比值;由于自动目标识别全站仪还不具有目标搜索功能,只有将望远镜大概照准目标棱镜使棱镜回光光斑打在CMOS阵列上才能实现精确照准测量,所以自动目标识别测量与人工测量的粗瞄准都是人工操作的,瞄准工作由指定专人操作;在精确瞄准时,自动目标识别是通过自动瞄准的,而人工瞄准是靠人眼瞄准的,所以测量效率必定有所差别,其测量结果如表10所示。

表10 自动目标识别照准测量与人工照准测量效率比较
根据表10可知,自动照准测量效率比人工照准测量效率高。自动目标识别照准测量效率是人工照准效率的1.7倍左右,如果将自动目标识别系统增加自动搜锁功能,测量效率会进一步提高。
5 结束语
本文将CMOS图像传感器内置于RTS010A全站仪中,构造国产自动目标识别全站仪,在完成图像光斑中心坐标提取的情况下,对自动目标识别全站仪系统模型标定进行研究,得出以下结论:
1)通过图像处理并获取光斑图像中心点坐标,进而对CMOS阵列中心进行标定,分别变化水平角和竖直角时图像光斑中心坐标的变化来拟合两条直线,两条直线的交点O′与CMOS阵列中心O的坐标差值来衡量CMOS阵列中心标定的精度,经验证分析其标定精度小于0.02个像素坐标;
2)根据光斑图像中心点像素坐标与全站仪望远镜旋转角之间的关系对自动目标识别系统模型进行标定,标定中将含有大角度旋转的标定结果与剔除大角度旋转标定结果比较,由标定模型中的截距与CMOS阵列中心点坐标的偏差值可知剔除大角度旋转的标定模型精度更高,x方向仅为0.073个像素坐标,y方向为0.132个像素坐标,换算为角度即为水平角1.55″,竖直角为2.52″。经分析y方向存在归位误差,所以用x方向偏差作为评价精度的标准,且实现了全站仪自动目标识别的功能。
3)对自动目标识别全站仪马达驱动功能进行分析,经测试分析马达驱动精度可靠,自动目标识别自动照准精度在马达驱动精度范围内,且测量效率较人工测量高,是人工测量效率的1.7倍左右。
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
天水行政学院学报(2022年4期)2022-11-18
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
少儿美术(快乐历史地理)(2020年4期)2020-02-24
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
工程与建设(2019年3期)2019-10-10
学苑创造·A版(2019年4期)2019-05-10
电测与仪表(2016年9期)2016-04-12
