
基于模板匹配的高分影像椰子树提取方法
2018-11-02 05:23于海洋吴建鹏王燕燕
测绘工程 2018年11期
杨 礼,于海洋,吴建鹏,王燕燕,李 莹,王 宁
(1. 河南理工大学 测绘与国土信息工程学院,河南 焦作 454000;2.河南思拓力测绘科技有限公司,河南 郑州 450018)
遥感技术在林业中的应用已经非常广泛[1],而无人机技术作为新型遥感技术异军突起[2],具有高时效、高分辨率、低成本、低风险及可重复使用的优势[3-4],拓展遥感技术在林业资源调查、林业有害生物防治、森林防火中应用的深度和广度[5]。
在利用遥感技术调查树木密度时,通常人们首先选择点云来确定单株树棵数,进而求得树木密度,很少将无人机高分辨率数据结合模板匹配算法应用到森林资源调查。模板匹配在计算机视觉、模式识别、数据挖掘等众多研究领域应用广泛[6-12],如用于航片框标定位、地图点状符号分离、道路中心线追踪、图像几何精校正等[13-16]。本文针对无人机获取的高分辨率影像,采用模板匹配算法,基于相似性测度函数提取椰子树经济林单株树数量,建立一种椰子树棵数提取技术流程。
1 椰子树棵数提取技术流程
基于灰度模板匹配方法,建立从无人机影像上自动提取椰子树棵数的方法,其流程如图1所示。

图1 椰子树信息提取流程
2 匹配模板生成与相关系数测度
2.1 匹配模板生成算法
模板是描述特征信息以及方法的集合,其作为一个先验知识或者参数来使用。椰子树模板以二维方式描述椰子树灰度分布信息,来提供特征细节帮助识别椰子树。其模板是由样本分布灰度值求平均所得,模板生成的算式为
(1)
式中:x,y分别为模板的行列号;t(x,y)为模板的灰度值;m为生成模板所用的样本数量;fi(x,y)为采集样本的灰度值。
在模板匹配过程中,考虑到同一种植被之间存在差异性,于是对同一种植被建立多个模板构成模板组,以减小椰子树个体差异对椰子树提取精度的影响。模板组生成算法如图2所示,主要包括以下步骤:
1)首先根据模板组设置的模板个数n,将所有采集的样本尽可能平均分成n个样本子集,并根据模板生成算法将n个样本子集生成n个初始模板,然后将所有样本分别与这n个初始模板计算相关系数,根据相关系数最大原则归类所有样本,形成n个新样本子集参与下次模板的生成;
2)将所有样本与相应模板的最大相关系数求和,然后求平均值,把这个平均值作为对这次生成模板组质量的评价;
3)将上次形成的n个样本子集求平均更新模板,然后重复2)的计算,得出更新模板组的平均相关系数,计算前后生成模板组的平均相关系数变化量,如果模板组的平均相关系数不再增加或者变化量小于阈值,则终止计算,把最后一次生成的模板组作为计算的结果。

图2 模板组生成流程
2.2 模板匹配相关系数测度方法
相似性测度值以两个向量的方向为基础,不考虑向量的大小,主要有夹角余弦、相关系数等[17]。相关系数是多元统计学中用来衡量两组变量之间线性相关程度的一种方法[18],取值范围为[-1,1]。相关系数的绝对值越大,表明变量之间相关度越高。当两变量线性相关时,相关系数取值为1(正线性相关)或-1(负线性相关)。函数算式为
(2)
相关系数是标准化的夹角余弦,对数据进行归一化处理,不考虑各个向量的绝对长度,仅从形状方面考虑它们之间的关系,其具有旋转、缩放的不变性和鲁棒性强等特征。在进行相似性判断时,其函数值越大,表示两者相似度越高。
数字影像是离散整数矩阵,对高分辨率影像应用相关系数算法进行模板匹配,即基于灰度的影像模板匹配。由离散灰度数据对相关系数的估计为以相关系数测度方法作为椰子树识别的判断依据,建立椰子树模板匹配过程如下:
(3)
1)先将某个波段生成的模板组与该波段计算出相关系数影像层,即将模板组沿着影像逐像素计算各模板与该像素为中心所在模板大小区域的相关系数,取其最大值作为相关系数影像层的像素值;
2)根据相关系数阈值来确定粗匹配点,即大于相关系数阈值所有点作为粗匹配点;
3)以粗匹配点为中心,在模板大小区域内该粗匹配点是否为最大值,如果为最大值则为匹配结果点,否则不是。
3 实验数据处理与结果分析
3.1 数据获取与预处理
无人机拍摄于2016-12-07,采用索尼微单A7R相机获取某椰子树种植区的高分辨率影像,该相机传感器类型为CMOS。生成正射影像空间分辨率为0.1 m,试验区面积大约为0.159 km2,试验区椰子树为1959棵,试验区如图3所示。
3.2 模板生成结果与分析
论文共采集130个椰子树样本,模板大小为81×81,在采集样本时,为了尽量让样本具有代表性,在影像上随机采集,然后将采集的样本生成模板,利用模板匹配算法在影像一块区域里进行密集采集样本,然后检查和修正样本,最后在试验区采集的样本分布如图3所示。

图3 研究区及样本采集
将采集的样本生成单一模板组,以及拥有2、3、4、5个模板的模板组。由于模板匹配采用相关系数的灰度匹配,所以每个影像层都可以生成模板,以红色波段为例其模板如图4所示。
表1列的是各模板组的模板与对应样本之间的相关系数平均和,即模板组整体与样本之间的相似度。从图4及表1可以看出,随着模板组设置模板的个数增多,模板组相关系数增大,生成的模板越清晰,越能代表样本的灰度分布,而且红波段生成的模板质量优于绿波段和蓝波段模板质量。
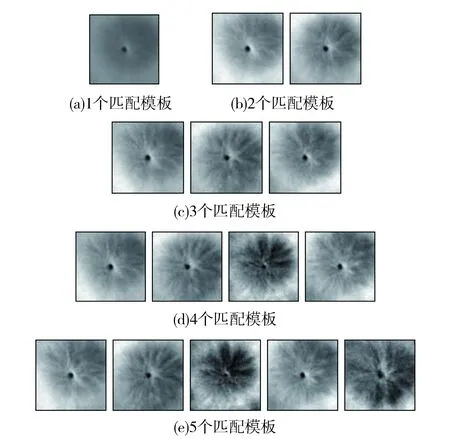
图4 基于红波段生成的不同模板组合
3.3 模板匹配结果与分析
根据影像上的人工识别,对模板匹配结果存在误匹配以及未识别的情况进行统计,以不同模板个数的模板组、波段、阈值对模板匹配效果进行分析评价。

表1 不同波段的模板组质量评价系数
在模板匹配结果分析时,同时考虑匹配结果正确率和识别完整率,其算式分别为
(4)
(5)
式中:C为匹配结果正确率;M为匹配正确棵数;S为匹配结果统计的棵数;D为识别完整率;Z为试验区椰子树总棵数。匹配结果正确率反映匹配结果的纯真度,识别完整率反映匹配正确棵数偏离椰子树真实棵数的程度。
3.3.1 相关系数阈值分析
在模板匹配时,相关系数阈值的设置对匹配结果有很大的影响,论文以红波段生成的各模板组,
在不同相关系数阈值下进行匹配,匹配结果统计如图5和表2、表3所示。从图5和表2可知,随着相关系数阈值的减小,各模板组匹配结果正确率随之减小,而各模板组匹配识别完整率则随之增加,当相关系数阈值达到0.1以后,各模板组匹配结果正确率和识别完整率都趋于稳定。而从表3可知,影响匹配效果的匹配错误和未识别椰子树棵数之和,在相关系数阈值达到0.1以后,各模板组都处于最小。因此,椰子树模板匹配最优相关系数阈值应处于0.1以下(含0.1)。相关系数阈值为0.1时的红波段单一模板匹配结果如图6所示。
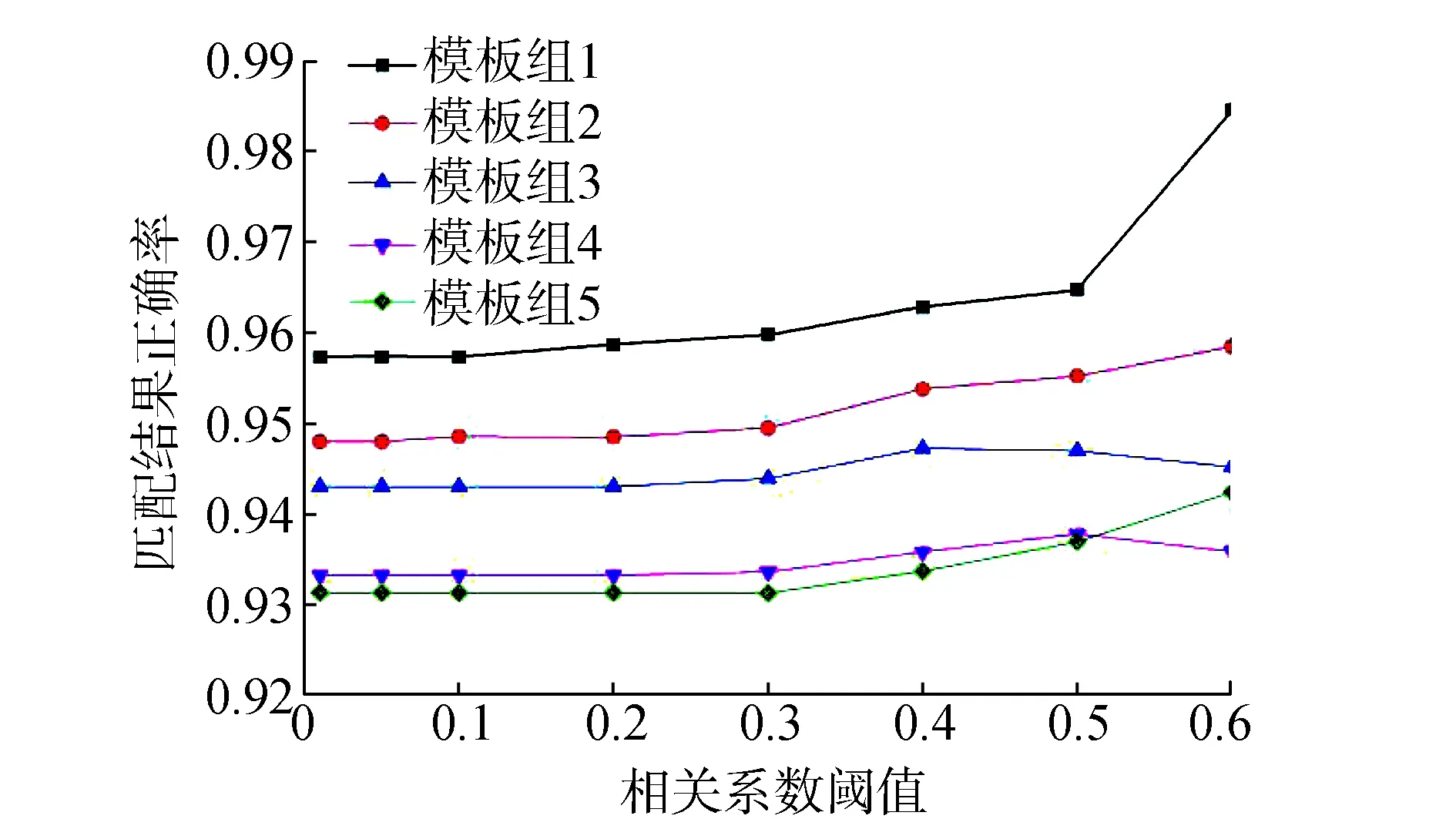
图5 在不同阈值下各模板组匹配结果正确率对比图

表2 各模板组识别完整率 %
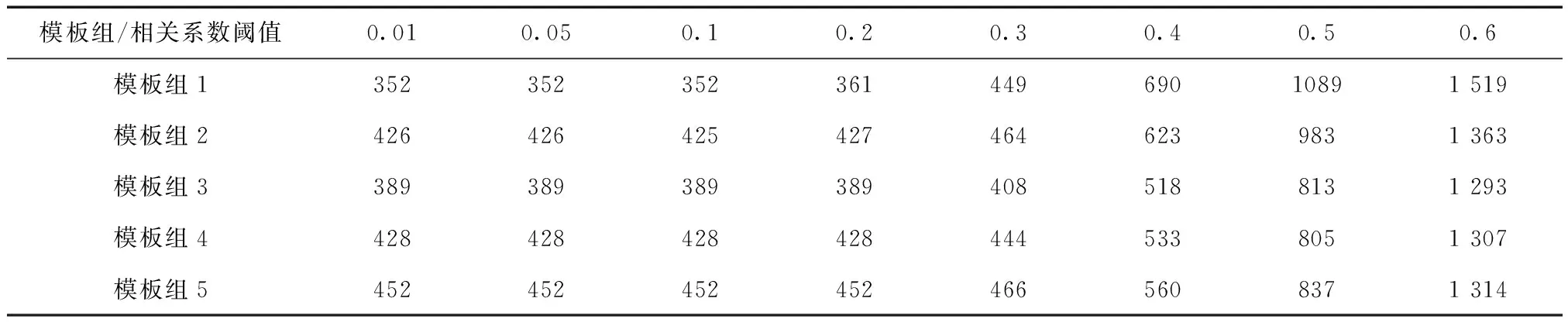
表3 各模板组匹配错误和未识别椰子树棵数之和

图6 相关系数阈值为0.1的红波段单一模板匹配结果
3.3.2 模板组匹配分析
在模板匹配过程中,针对椰子树之间的差异,在红波段建立各个模板组进行匹配,对各模板组匹配结果进行分析。从图5和表2、表3中可知,当各模板组都在最佳相关系数阈值下进行匹配,单一模板组匹配结果正确率与识别完整率都处于最高,而且匹配错误与未识别椰子树棵数之和也是最低。随着模板组模板个数的增加,模板组匹配效果趋于不好,单一模板对椰子树进行匹配的效果更好些,出现这种结果,认为是单一模板更适合用于提取林木密度比较大的圆形树木。
3.3.3 波段模板匹配分析
椰子树对不同的波段有不同的反射特性,在不同波段下的模板匹配效果有不同的差异。分析可知,对于红波段在相关系数阈值小于0.1(含0.1),用单一模板对椰子树进行模板匹配,匹配效果较为理想。在模板匹配过程中,不同波段采用相同模板匹配方法,进行模板匹配,其具有相同的匹配规律。在相关系数阈值设置为0.1时,对红、绿、蓝波段分别用单一模板进行匹配,红、绿、蓝波段识别正确棵数分别为1 682、1 524、1 618,识别错误棵数分别为75、120、148,进而得到其匹配结果正确率分别为95.7%、92.7%、91.6%,识别完整率分别为85.9%、77.8%、82.6%。在红绿蓝波段中,椰子树在红波段的匹配正确棵数、匹配结果正确率以及识别完整率都是最高,而匹配错误棵数是最少。因此,在红绿蓝波段中,红波段是模板匹配识别椰子树的最佳波段。
4 结束语
基于模板匹配算法,对椰子树进行模板匹配时,分析波段、模板组和相关系数阈值的选择对椰子树提取结果的影响。研究表明在相关系数阈值小于0.1(含0.1)时,用红波段单一模板进行模板匹配,匹配的效果比较好,其匹配结果的正确率达95.7%,椰子树识别完整率达85.9%。
在采集样本时,以椰子树中心进行采集,样本的中心为单株树的中心,最后生成的模板进行匹配,确定的位置基本上也都在椰子树的中心,如果把该试验区的NDSM (Normalized digital surface model)一同进行处理,则同时可以把树高统计出来,从而可以同时得到林分密度和单株树高,可为森林资源调查提供一种新的技术方式,有待进一步研究。
猜你喜欢
中华养生保健(2020年7期)2020-11-16
小聪仔(科普版)(2020年7期)2020-02-01
小聪仔(科普版)(2020年7期)2020-02-01
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
家教世界·创新阅读(2016年11期)2016-12-27
天津护理(2016年3期)2016-12-01
故事作文·低年级(2016年11期)2016-11-29
故事会(2016年15期)2016-08-23
高师理科学刊(2016年8期)2016-06-15
