
空间细胞机器人系统关键技术及其应用
2018-11-08 03:42安德孝
宇航学报 2018年10期
赵 航,赵 阳,田 浩,安德孝
(哈尔滨工业大学航天学院,哈尔滨 150001)
0 引 言
随着航天技术的日益进步,以及人类对太空探索与利用的需求增加,大型化已成为未来航天器的发展趋势之一,如空间站、空间太阳能电站、大型空间反射望远镜等,其尺寸可达到公里级[1]。如此尺寸的大型空间设施无法一次性发射升空,需要分模块发射后进行在轨组装,所带来的是相应的在轨抓取、转移和装配等问题。目前大型空间设施,如空间站,其在轨建设主要依靠空间机械臂或转位机构完成舱段之间的简单组装[2]。随着航天器功能的复杂化,其结构也日趋复杂,对在轨操控机构末端执行器提出了更高的适应性要求,传统在轨组装方案面临巨大挑战:
首先,空间机械臂在轨完成大型系统的转移和装配时结构刚度差、精度低、耗能大;自身结构以及基座机动范围严重限制其操作范围;机械形式固定,功能单一,无法适应多种装配任务的需求。
其次,未来大型空间设施的建设与运行需要进行监视、检修、预警、搬运、辅助宇航员等操作任务,空间操控机构的需求量和任务量将大大增加,现有的结构形式固定、执行任务单一的空间操控装置很难满足要求。
因此,对于上述航天器大型化导致的空间复杂任务,需要一种执行任务灵活自主,操控范围广,使用可靠性高,可变构型,功能易扩展的新型空间操控装置。模块化自重构机器人(Modular Reconfigurable Robotic System,MRRS)最早由Fukuda等人于1988年提出,称为DRRS(Dynamic Reconfigurable Robitic System)[3],这种机器人系统由若干模块构成,能根据需求自重构为不同构型。Yim等人认为,在长期的太空任务中,具有自重构能力的系统相比于固定构型机器人具有以下优势:多任务和未知任务处理能力;节约发射质量体积与发射次数,从而降低成本[4]。此外,模块化机器人能够对性能降低或损坏的模块进行替换,从而实现系统的高可靠性,降低在轨维护的成本。
模块化自重构机器人自其概念提出以来的三十年中,在设计制造,自重构规划,运动控制等领域均有长足发展[5-10],对其在航天领域应用亦有一定的研究[11-12]。如马里兰大学提出的MORPHbots (Modular On-Orbit Reconfigurable Cooperative High-dexterity Robots)[12],是一种模块化、在轨可重构且具有多机器人协作能力的空间智能机器人系统。与一般的模块化自重构机器人不同的是,MORPHbots依靠在大型空间结构上使用专用机械臂将各个模块进行组装形成结构形式多样的机器人,以完成不同任务。
当前模块化机器人多为同构(homogenous)或n类模块型(n-modular,其中n多为2),相比异构(heterogeneous)模块化机器人来说,其设计、重构及运动控制更加简单,但同时降低了系统的构型能力、功能以及任务适应性。此外,当前自重构模块化机器人研究重点主要在其机械系统设计、构型规划与控制、运动规划与控制等方面[5-12]。模块化机器人目标构型求解与优化问题的研究主要集中在可重构模块化机器人领域中,该问题的研究对象通常为串联构型[13-15],而对于自重构模块化机器人的相关研究近年来则鲜有报道[5,16],面向任务的复杂构型求解与优化问题仍需要进一步深入研究。综上,模块化自重构机器人一方面受模块种类的限制,另一方面由于当前对目标构型求解的研究尚有一定不足,能够实现的功能有限,无法满足复杂空间任务的需求。
空间细胞机器人(Cellular Space Robot)[17]是一种应用于空间操作任务并实现多层次完全自主重构的新型空间操控装置。细胞机器人的概念最早源自Fukuda等人提出的CEBOT(Cellular Robotic System)[18],其从生物学领域细胞的概念获取灵感,将传统机器人进行单层模块化划分,各个模块(称为“细胞”)均具有一定的智能且能够实现“细胞”间的自主连接与分离。然而随着DRRS的提出,细胞机器人的概念逐步被模块化自重构机器人所替代。西北工业大学的黄攀峰等基于CellSat提出空间细胞机器人[19]的概念,是对空间细胞卫星概念体系的延伸与改进,其主要设计思想是将航天器系统本身按照典型子系统进行模块化划分,以实现不同的在轨任务需求。北京可以科技公司于2014年推出的一款应用于素质教育领域的CellRobot也采用了细胞机器人的概念,但其实质上是可重构模块化机器人,模块之间的组装需要通过人工进行。不同于CEBOT、CellRobot、细胞卫星与MRRS,空间细胞机器人系统是面向航天领域任务的,独立于现有航天器的空间操控装置,其具有不同于模块化机器人的多层次模块划分,能够很好的平衡系统功能性与复杂性,且在体系中引入了具有求解目标构型功能的决策层,能够实现完全自主重构,因此能够满足复杂空间任务的需求。
然而空间细胞机器人原有体系中的层次化划分较为粗略,且无法实现不同层次间的解耦,不利于空间细胞机器人的总体设计和后续研究。针对上述问题,本文依托空间细胞机器人的概念,对其原本的层次化体系进行改进,提出了建立在全新系统化体系之下的空间细胞机器人系统(Space Cellular Robotic System,SCRS),并对各个相关概念进行了重定义。
本文首先对空间细胞机器人系统的概念体系进行详细阐述,分别从硬件系统和软件系统两部分进行介绍,给出其系统组成并对其系统特点进行分析;通过空间细胞机器人面向对象的系统设计以及结构和接口设计,来阐明其硬件设计的准则与理念;随后提出空间细胞机器人系统研究中涉及的几项关键技术,如多智能体协同不确定行为规划、多层次机器人系统构型决策、多层次分布式冗余感知信息融合、多智能体协同无环境地图自主导航以及多智能体分层协同分布式控制等;最后本文结合当前航天技术的发展,对空间细胞机器人系统未来应用场景提出展望。
1 概念体系
空间细胞机器人系统(Space Cellular Robotic System,SCRS)是一种新型的空间智能操控装置,它由若干数量同构和异构的单元组成,能够通过多层次自主重构而实现不同构型和不同功能的机器人或机器人团队,以满足不同空间任务的需求。空间细胞机器人系统继承了传统模块化自重构机器人对多任务和未知任务的处理能力,并在此基础上应用多层次系统结构设计、标准化接口设计和柔性化软件设计等技术,使其具有更好的重构能力、更完善的功能以及更强的任务适应性。
1.1 硬件系统
空间细胞机器人硬件系统是和空间细胞机器人物理组成相关的所有机构结构的总和,包括细胞、组织、器官与机器人及团队四个层次。
细胞是空间细胞机器人的最小组成单元,也是其最小设计单元。细胞主要可以分为三类:①关节细胞,用于提供旋转自由度;②功能细胞,用于提供面向任务的功能;③间质细胞,用于实现胞间的重构操作。
组织是空间细胞机器人的最小广义运动单元,由细胞组成。广义运动是传统意义运动的扩展,包括旋转与平移等传统运动,也包括传感等功能运动。组织可以分为两类:①关节组织,用于实现传统的旋转与平移运动;②功能组织,用于实现扩展的功能运动。
器官是空间细胞机器人面向行为的最小功能单位,由组织组成。每个器官都能够实现若干运动组合而成的一种或几种行为。
机器人及团队是最终用于实现目标任务的单位,由器官组成,能够实现一种或几种指定任务。
上述概念是对硬件系统层次的定义,按照该层次的定义,当物理意义上的单个细胞直接去完成任务时,该细胞则划分至机器人层次;而当单个细胞直接实现一种行为时,该细胞则划分至器官层次。如图1所示。

图1 硬件系统概念体系Fig.1 Conceptions of hardware system
1.2 软件系统
空间细胞机器人软件系统是和空间细胞机器人决策与控制相关的所有算法及软件的总和,主要包括四大功能:行为决策、构型决策、行为控制以及构型控制。
行为决策是对任务及环境到机器人行为映射的研究,用于寻找能够实现指定环境下的指定任务的行为序列或行为树。对于未知任务,总是能够设置若干已知的前置任务进行观测,以逐步减少该未知任务的未知因素,最终将其转变为已知任务。因此可以认为行为决策处理的总是已知任务。
构型决策则是对机器人行为到构型映射的研究,用于寻找能够实现指定行为的机器人构型。目标构型是在一定约束条件下对行为决策得出的行为序列或行为树实现最优覆盖的机器人构型,而该构型通常情况下无法实现对行为的完全覆盖,需要在执行行为时实现动态重构,这也是构型决策的研究内容。
构型控制是实现机器人系统从初始构型重构到目标构型的过程。
行为控制则是机器人系统执行决策行为以完成目标任务的过程。
空间细胞机器人系统处理的对象主要包括外部的任务和环境,自身的行为和构型,而这些对象之间则由上述的软件系统功能相互联系起来,如图2所示。

图2 软件系统概念体系Fig.2 Conceptions of software system
1.3 系统组成
空间细胞机器人系统由表达系统、决策系统、控制系统、实现系统以及管理系统组成,各分系统及其之间的关系如图3所示。
表达系统的主要功能是将任务、环境及空间细胞机器人系统本身表达为决策可用的数学模型;决策系统用于实现行为决策及构型决策功能;控制系统则实现系统的行为与构型控制;实现系统是空间细胞机器人硬件系统的总和,负责根据控制系统的控制指令完成指定行为,实现指定构型;管理系统是整个系统的支撑框架,用于进行统一的子系统间数据交互管理、多线程工作流管理以及系统资源调度管理等。

图3 空间细胞机器人系统组成Fig.3 Composition of SCRS
1.4 系统特点
与传统模块化自重构机器人相比,空间细胞机器人系统具有以下特点与优势:
1)模块化自重构机器人通常以同构或n类模块型(类同构)为主,异构系统通常仅应用于编队作业,此外,模块化自重构机器人在系统设计上仅有单一层次上的重构,即单元模块重构为系统级别单元,导致其构型种类有限,应用场景单一,无法适应复杂空间任务;空间细胞机器人系统采用多层次重构设计,重构过程中划分为细胞、组织、器官至机器人四个层次,大大增加了构型的丰富性和灵活性,且降低了对单一层次模块种类的需求,能够很好适应空间复杂任务。
2)当前模块化自重构机器人的研究很少涉及面向任务的系统构型决策,使其只能由已知构型向人为确定的目标构型进行重构,无法实现完全自主地应对复杂空间任务;空间细胞机器人系统通过对决策系统的研究,能够完成从任务到机器人行为与构型的映射,使其具有自主制定最优化目标行为及目标构型的能力,能够实现完全自主地应对已知与未知任务。
3)传统模块化自重构机器人分别自成体系,其模块研制完成即系统完全定型,很难进行大量扩充和更改;而空间细胞机器人系统则制定一系列的系统级标准,采用面向对象的系统设计思想,在实现系统下很容易根据给定接口标准进行新硬件的设计和扩展。
2 设计理念
传统空间操控装置如空间机械臂,是针对某个或某些特定任务需求进行整体设计的,这使其具有专用性,功能相对单一。模块化自重构机器人则是针对应用场景可能的需求设计单元模块,进而组合形成能够完成不同任务的机器人构型,具有一定的多任务适应性。传统的模块化自重构机器人分为同构和异构两类,目前其设计多为同构类型或n类模块型,如PolyBot[6]、M-TRAN[8]-[9]系列等。为使空间细胞机器人系统具有良好的构型能力,同时不致系统过于复杂,在结构上,除末端执行机构外,尽量采用同构设计;而在功能上,则尽量使每个模块功能单一化。
空间细胞机器人在系统设计上借鉴了面向对象程序设计的理念:首先针对应用场景的任务需求进行细胞类和接口的抽象化设计,描述各类细胞的属性、方法,便于通过建立新的抽象类和对抽象类进行继承而实现整个系统横向和纵向的扩展;然后再根据具体的功能需求进行类的实例化,设计具体的细胞硬件,从而实现软件硬件化的整体设计思路。
2.1 面向对象系统设计
空间细胞机器人系统的设计借鉴面向对象程序设计思想,其设计流程如图4所示,其中对任务的分析如虚线所示。首先,空间细胞机器人系统的基本组成可以抽象为单元类,这是系统所有子类的父类,即系统所有其他抽象类与实体类均继承自单元类;细胞/组织/器官类是直接继承单元类的抽象类,是各类细胞/组织/器官抽象类的父类;上述抽象类是由空间细胞机器人系统体系决定的,与应用场景和任务无关,主要反应各层次基本单元通用的抽象属性与方法。其次,在某一应用场景下,对可能涉及的任务需求进行分析,进而得到对空间细胞机器人系统功能的需求,根据功能需求设计相应的细胞/组织/器官实体类。最后根据多种实体类抽象化各层次单元的抽象类。

图4 面向对象的系统设计流程Fig.4 Object-oriented system designing
在得到较为完备的抽象类之后,系统的设计流程中对任务的分析便转向为如图4实线所示。当出现新的应用场景及任务时,根据相应功能需求选定细胞/组织/器官抽象类,再进行相应实体类设计。
这样的系统设计流程,便于采用继承和重载方式对系统进行纵向扩展;同时也便于应对新任务新需求,对系统进行横向的扩展。
2.2 硬件设计
2.2.1实体类设计
本文给出一种空间细胞机器人系统实例的硬件设计,在不具备较完备的抽象类时,硬件系统的设计是由任务到实体类的,以典型的空间三角桁架结构在轨装配场景(如图5所示)为例,首先对任务进行分析,完成单段桁架自组装任务需要1个监控机器人,至少2个搬运/操控机器人(5-DoF以上,对称布置末端抓取装置)。

图5 空间三角桁架结构在轨装配Fig.5 On-orbit assembly of space triangular truss structure
面向空间三角桁架在轨装配任务的空间细胞机器人系统实体类设计流程如图6所示,根据任务所需功能,系统由器官到细胞依次可以划分为:操控器官、监控器官;操控组织、监控组织等功能组织,摆转组织、旋转组织等关节组织;旋转细胞、摆转细胞等关节细胞,间质细胞。
完成由任务到器官、组织及细胞实体的功能性设计之后,可以将系统硬件的具体设计最终归结到单胞与接口的设计。
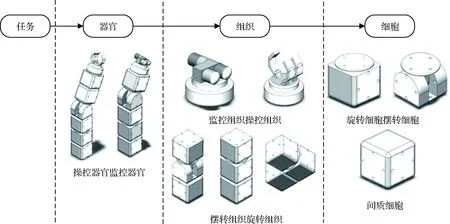
图6 空间细胞机器人实体类设计流程Fig.6 Entity classes design flow of SCRS
2.2.2单胞设计
在空间三角桁架装配场景下,关节细胞设计为包含4个被动连接面的立方体构型,如图7所示。
关节细胞采用1个面齿轮和2个直齿渐开线齿轮构成传动机构,其中面齿轮所在平面作为运动输出面。定义面齿轮在平面内绕自身中心线运动时为旋转运动;定义面齿轮绕直齿轮旋转轴运动时为摆转运动,如图8所示。

图7 关节细胞模块传动系统Fig.7 Drive system of the joint cell

图8 关节细胞自由度示意图Fig.8 Schematic diagram of the DoFs of joint cell
间质细胞设计为包含2个主动连接平面和2个被动连接平面的立方体构型,如图9所示。

图9 间质细胞主动连接面示意图Fig.12 Schematic diagram of the active junction surface of mesenchyme cell
2.2.3接口设计
关节细胞与间质细胞分别具有独立的电源与控制器,细胞间的数据通信通过无线通讯模块实现,因此空间细胞机器人系统单胞接口设计中只需要进行连接机构设计即可。
细胞间机械连接机构由主被动连接平面组成,分别带有4个均布的钩爪与钩孔。主动连接机构由曲柄滑块机构与正弦机构组成。
为防止关节细胞旋转与摆转运动之间的耦合,设计机械限位来辅助自由度模式的切换,如图10所示。

图10 主动连接机构动作序列示意图Fig.10 Schematic diagram of action sequence of the active connecting mechanism
连接时,当主动连接面的钩爪随曲柄滑块机构带动旋出第一预设角度,旋入被动连接面钩孔中,完成主被动平面连接,此时功能模块输出旋转自由度;当钩爪继续旋转旋入面齿轮支撑件连接孔内,完成主被动平面及支撑件连接与锁定,此时实现对旋转运动的机械限位,功能模块输出摆转自动度。
3 关键技术
3.1 多智能体协同不确定行为规划
行为规划用于将给定任务分解转化为机器人可以直接执行的动作,行为规划技术目前已有很多研究,如利用各类搜索算法的经典规划、图规划,分层任务网络规划,针对时间和资源约束的时态规划与资源调度,针对不确定性的马尔科夫决策过程规划、模型检测规划,多智能体规划等等[20]。
对于空间细胞机器人系统,考虑其自身特点和面向的空间任务的特殊性和复杂性,如空间环境和任务可能出现不可预知的变化,需要系统在执行行为的过程中规避危险,对状态的观测可能不完整等等,规划特点如下:
1)系统Σ是:动态的、无限的、不确定的和部分可观的;
2)规划解需要满足状态转移过程的约束;
3)规划器需要考虑系统在规划过程中的变化,判断当前规划解是否仍然适用,实现动态规划;
4)对于机器人团队,需要实现针对多智能体的规划。
目前对于具有上述某些单一或部分特点的规划问题已有很多研究[21-24],而对于空间细胞机器人系统,需要将多智能体与不确定因素等进行综合考虑,这涉及到多种规划方法的集成问题,也是当前自动规划问题发展的方向[20]。
3.2 多层次机器人系统构型决策
3.2.1构型分层求解
构型求解问题在模块化可重构机器人领域有一定的研究[13-15],而模块化自重构机器人领域研究鲜有报道。Fukuda等人在对DRRS系统进行研究时,针对串联机械臂类构型提出了一种计算-优化两步构型决策方法[5-16]。Murata等人在M-TRAN的研究中提出,如何根据给定任务得到最优化或近似最优化目标构型,对于自重构系统来说是一个普遍的问题[8],然而并未在后续研究中对此问题进行解决。
空间细胞机器人系统的构型求解是一个分层求解问题,首先基于已知的构型数据库,根据行为规划得到的规划解集合{aS},可以根据集合覆盖问题[25]的解算方法,用已知构型的各自功能集Func对{aS}覆盖以进行构型求解;当已知构型数据库无法实现行为集合覆盖时,将未能实现的行为ai分解为动作集{ab},映射到更低层次构型(器官、组织甚至细胞)的功能,通过低层次构型对行为的分解集{ab}进行覆盖,再按约束条件将低层次构型组装为新的机器人构型补充到数据库中;如果低层次构型仍不满足需求,则需要针对无法实现的动作向空间细胞机器人系统补充新的单胞设计。
3.2.2多层次构型规划
构型规划问题在模块化自重构机器人领域已进行了较多研究,其已被证实为NP完全问题,目前对于构型规划问题尚未有通解。从模块化自重构机器人概念提出至今,已有很多重构问题解决方法被提出,如各种搜索算法、分层任务网络(HTN)、动态规划、遗传算法等,基于控制的随机动作、分布式规划等,基于智能体的元胞自动机、马尔科夫决策过程(MDP)、强化学习等,基于仿生的虚拟胚胎形成、胞质流等[26]。
构型求解的结果可能分为几种情况:单一构型;多构型协同;行为规划解相似结构。对于前两者,构型规划即求取实现从初始构型C0到目标构型Cg的重构操作规划解AC;而对于最后一种情况,构型规划则与行为规划解相关:首先要求取从初始构型C0到初始目标构型Cg 0的规划解,然后需要根据当前所需执行的行为及构型求解结果决定执行行为之前是否需要进行重构操作。
3.3 多智能体协同无环境地图自主导航
空间细胞机器人系统需要实现自动重构和自主的完成指定任务,自主导航是一项重要技术。机器人系统自主导航包括定位、环境地图创建与路径规划。其中,将定位与地图创建相结合的技术称为同步定位与地图构建(Simultaneous Localization And Mapping,SLAM)[27],是机器人自主导航的关键技术,也是进行路径规划的基础和前提。路径规划[28]是机器人系统自主导航的另一个关键技术,包括从起始点到目标点的全局路线规划以及进行实时避障的本地路线规划。
对于空间细胞机器人系统,由于处于空间环境中,若采用SLAM技术,很难事先构建精确的环境地图,无地图导航[29]则是一个很好的解决办法;同时也要求路径规划具有更强的环境变化响应能力;此外,多机器人协同路径规划也是空间细胞机器人系统应用中所面临的问题,同时也是当前路径规划的研究热点。
3.4 多智能体分层协同分布式控制
空间细胞机器人系统由大量细胞、组织、器官单元构成,系统结构层次复杂;此外,为完成复杂的空间任务,空间细胞机器人通常需要形成多机器人团队进行协同工作。因此,传统的控制方法很难应用到空间细胞机器人系统当中。基于行为的多智能体控制技术,以智能体为单元进行多智能体分布并行控制,能够根据需求增减或修改智能体控制单元,增加控制系统灵活性与适应性,是空间细胞机器人系统控制问题的一种有效解决方法。
多智能体协同控制技术自提出以来已经在一致性控制、集群控制、编队控制、跟踪控制等问题上有了一定研究和发展[30-32]。对于空间细胞机器人系统,如何将多智能体控制技术与其系统特点相结合以实现多层次分布式控制体系,以及将多智能体控制算法与其他智能控制算法相结合以提高控制效率、发挥分布式控制系统性能,则是后续研究的关键。
4 应用展望
空间细胞机器人系统的标准化、多层次模块化、可自重构设计,使其具有很强的灵活性和适应性,能够完成复杂多变的空间任务;所采用的面向对象的系统设计理念,使系统具有良好的横向与纵向扩展能力。空间细胞机器人系统是未来空间操控装置的发展趋势,适用于在轨建设、在轨维护等任务周期长、机器人操作复杂、任务多变的应用场景,乃至大型行星的长期探测任务。
4.1 在轨建设与维护
当前大型空间设施的建设方式主要有在轨展开和在轨组装两种,如空间大型天线和太阳电池板多采用在轨展开方式,国际空间站则采用舱段拼接的在轨组装方式进行构建[33-34]。限于运载能力,在轨组装将成为未来大型空间设施建设的重要方式。当前在轨组装主要有通过空间机械臂或转位机构实现的舱段拼接,以及如iBoss等细胞卫星[19]的单元模块在轨组装。未来大型空间设施尺寸将达公里级,以传统的空间机械臂很难完成如此大规模的在轨组装任务;如果采用空间设施单元模块自组装,每个单元模块必须携带一定的动力装置与能源,大大增加结构设计难度与发射载荷。
空间细胞机器人系统不仅能够通过重构形成不同功能构型的机器人,具有提供完全自主的在轨组装与维护能力;还能够构成多种功能的机器人团队,通过多机器人协同工作,具有更加灵活的在轨组装能力以及更广的在轨操控范围;空间细胞机器人系统自身的模块可替换性,大大降低了发射成本,提高了操控装置系统的可靠性;此外,空间细胞机器人系统的细胞、组织、器官等单元在特殊情况下,亦能够作为操控目标结构件的替代而使用。
4.2 长周期行星探测
行星探测是人类对地外星体的观测与探索,迄今为止,人类已经向太阳系的诸多行星、卫星及小行星发射了无人探测器。行星探测的发展趋势是行星表面软着陆并进行采样,这促使了行星探测机器人的发展。行星探测机器人能够大大节省探测成本、完成长期实地考察。行星探测机器人的研究重点是其在各种非结构化表面上的移动能力[35]。
空间细胞机器人系统的自重构和模块更换能力,使其能够根据环境情况自主选择相应的移动方式,从而克服未知环境和突发因素造成的困难,提高行星探测的可靠性,适应长期探测任务。
5 结 论
本文针对一种新型的空间操作装置空间细胞机器人系统,给出了系统的概念体系,并对其行为及构型决策、机器人控制、自主导航等关键技术与未来的发展方向进行了讨论。空间细胞机器人系统能够用于完成大型空间结构的在轨运输、组装、维修与监测,非结构化表面勘测、采样等任务,适用于在轨服务、行星探测等多种应用场景。
目前对于空间细胞机器人系统的研究尚处于起步阶段,对多智能体协同不确定行为规划、多层次机器人系统构型决策、多智能体协同无环境地图自主导航以及多智能体分层协同分布式控制等关键技术需要开展更加深入研究;此外,空间细胞机器人系统的软硬件设计还需要进一步考虑具体的空间环境影响。
空间细胞机器人系统打破了传统空间操控装置(机械臂)针对指定任务的设计模式,参考模块化自重构机器人,并针对构型能力、功能及任务适应性进行了改进,提出了系统多层次设计以及面向对象的系统设计理念,其多任务适应性及可更换的模块化设计能够显著降低发射和在轨维护成本。此外,空间细胞机器人系统涉及多种领域前沿关键技术,对空间细胞机器人的研究能够促进各学科交叉与发展。空间细胞机器人系统采用模块化与标准化设计理念,能够在一定程度上推进航天领域通用化设计的应用与发展。
猜你喜欢
汽车实用技术(2022年11期)2022-06-20
军民两用技术与产品(2022年1期)2022-06-01
西北工业大学学报(2022年1期)2022-04-22
当代陕西(2022年4期)2022-04-19
摄影世界(2022年1期)2022-01-21
建材发展导向(2021年14期)2021-08-23
天津理工大学学报(2021年2期)2021-06-03
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
中国生殖健康(2020年7期)2020-12-10
现代装饰(2020年5期)2020-05-30
