双轮自平衡寻迹智能车设计
2018-11-08 03:09刘韶清黄毅彬陈景贤
电子测试 2018年21期
刘韶清,黄毅彬,陈景贤
(广东海洋大学电子与信息工程学院,广东湛江,524088)
1 自平衡双轮移动小车的研究背景
智能汽车是未来汽车的发展方向,将在减少交通事故、发展自动化技术、提高舒适性等许多方面发挥很重要的作用;同时智能汽车是一个集通信技术,计算机技术,自动控制,信息融合技术,传感器技术等于一身的行业,它的发展势必促进其他行业的发展,在一定程度上代表了一个国家在自动化智能方面的水平。寻迹是智能车自主运动的关键技术之一,在现有的多种寻迹方式,电磁探头寻迹是稳定性较好的方式之一。通过车载的电磁检测头寻路,获取路径信息,经信息处理和融合,自主控制车辆在期望的路径上高速平稳地行驶。
近年来,两轮自平衡小车的研究、发展逐步加快,在很多领域都有应用,同时伴随其执行任务的复杂性,对其适应环境的能力要求逐渐提高。比如,在空间狭窄的地方,交通堵塞的情形,或者弯道较大的场所,就小车如何在较短的时间处理所获取的信息,并执行相应的任务,已成为研究的热点。两轮自平衡小车概念的提出,顺应了日前研究的热点,可很好地解决上述复杂环境下小车的运动,加之无线遥控技术,可远距离控制两轮自平衡小车的运动姿态,未来在军用、民用领域有广泛的发展空间。
自平衡双轮移动小车也是一个多变量、高阶次、非线性、强耦合、欠驱动的运动控制系统,其物理意义明显(失去稳定就摔倒),便于观察、价格便宜、易于软件、硬件实现、占用空间小,是具备极大潜力的移动平台。自平衡双轮移动小车的研究兼具理论意义和实用价值,因而吸引人们广泛的关注,受到世界各国科学家的重视,现已成为颇具魅力与挑战性的研究课题之一。
2 自平衡双轮移动小车数学模型的建立
2.1 直流电动机建模
实际上,在伺服机构中,由电机输入电压UL和UR到电机输出力矩TL和TR的过程,是一个动力学过程,其动力学模型是双轮自平衡小车动力学模型的组成部分。以直流永磁电机作为选择,其工作原理如图1所示。为得到负载转矩Tm,需在电机两端加入控制电压Um,控制电压会使回路中产生电枢电流im,通过电流与励磁磁通间的相互作用,从而产生电磁转矩。电磁再带动电枢旋转,从而得到负载转矩。
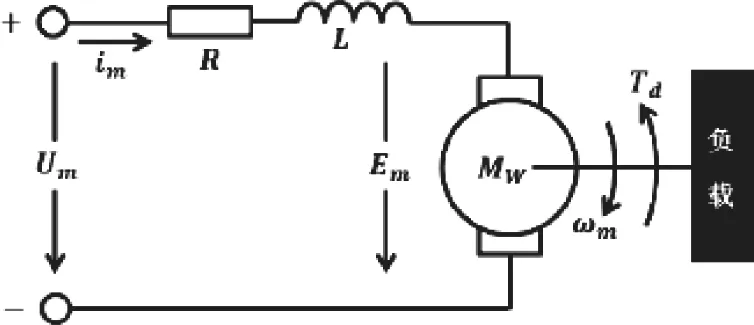
图1 直流电动机原理模型
2.2 车轮建模
车轮的运动可分为:前进和绕轴的转动。车轮的受力分析如图2所示,根据图像可知,单个车轮受到的力分别为自身重力G,地面支持力FNL,地面摩擦力HfL,小车车身对其作用力HL,电机输出转矩TL。根据牛顿定律,车轮在水平方向所受合力(车轮与地面的摩擦力与车体对车轮的作用力之差)等于水平方向的加速度与车轮质量之积,从而求出车轮前进运动方程。车轮所受力矩之和(电机提供给车轮的转动力矩与摩擦力对车轮的转动力矩之差)等于车轮的转动惯量与角速度之积,从而求出车轮的转动方程。
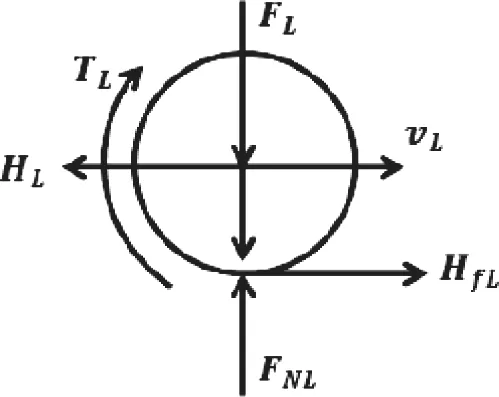
图2 车轮受力分析
2.3 车体建模
自平衡双轮移动小车直立模型可简化为倒单摆模型,改变重力的方向或是增加额外的受力,使得恢复力与位移方向相反才行,这两者都能使得倒单摆能稳定在垂直位置,可是我们只能做到第二种方法。因此控制小车直立平衡稳定的方法就是能够精确测量车模倾角θ的大小和角速度θ›的大小或控制车轮的加速度。

图3 自平衡双轮移动小车运动模型
3 自平衡双轮移动小车平台搭建
本设计以选用freescalekenitis K60DN512Z单片机作为核心控制器,选用MPU 6050获取车模姿态,运用卡尔曼滤波算法对陀螺仪与加速度传感器的测量值进行综合分析处理得到小车的运行数据和系统姿态数据的最优估计值:倾斜角和角加速度信息。采用经典 PID 控制规律、极点配置这两种方法设计相对应的平衡控制器,以实现小车的动态平衡控制。通过通信模块电脑与小车的蓝牙进行通信,控制小车实现前进、左右转、后退以及停止等运动姿态。选光电编码器读取小车的速度信息,红外传感器识别小车的方向。系统的整体设计方案如图4所示。
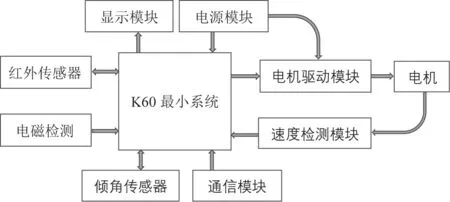
图4 小车硬件总体结构
使用freescalekenitis K60DN512Z处理器芯片,该芯片为Cortex-M4为内核,最高工作频率为100MHz,高达512KB片内Flash程序存储器,128KB片内SRAM,其板载资源有DMA、ADC、IIC以及UART等外设,可产生多路PWM用以控制电机。它负责控制各个模块间的协调工作,接收来自电磁检测模块采集到的路面信息,倾角传感器获取车模姿态、倾斜角和角加速度信息,编码器反馈的的速度信息,红外传感器获取小车的方向,最终形成合适的控制量对转向/行走电机进行控制,保证智能车快速稳定地沿指定路径行驶。同时通过通信模块把智能车行驶过程中的关键参数传送到电脑以便实时分析。
智能车系统采用标准车模7.2V 2000 mAh Ni-Cd充电电池进行供电,电机驱动模块可以用7.2 V充电电池直接供电,电磁检测、微处理器、红外传感器和速度检测等模块通过稳压芯片将7.2 V电压转换成稳定的5 V电压。
电磁检测使用电磁检测头寻路,输出相应的信号反馈给处理器进行算法处理。信号处理采用卡尔曼滤波算法,其中检波和放大也相当重要,这能使软件算法更加有效,这两个因素对小车的智能转向起着至关重要的作用。
由于路径复杂不同,智能车需要不停地调整转向和相应的倾角以适应跑道的变化。倾角传感器模块为智能车方向控制执行机构,红外传感器模块用以获取小车的方向,针对不同的路况信息对电机进行相应的控制,实现相应的转弯要求,从而保证智能车沿跑道准确行驶。
电机驱动模块和电机根据处理器的控制进行差速过弯、加减速等过程,要求能有很好的加速和制动性能。小车的电机驱动使利用两片半桥驱动芯片构成的桥式驱动电路。为了提高电源的应用效率,采用PWM对智能车进行控制调速,驱动电机的PWM波形采用了单极性的驱动方式,也就是在一个PWM周期内,施加在电机上的电压为一种电压,从而实现电机的调速。
速度检测模块使用的是光电编码器,即固定在电机输出轴上的码盘和光电接收器。由于光电编码器直接输出数字脉冲信号,因此检测当前智能车的速度时可以直接将这些脉冲信号反馈给微处理器,通过各种智能算法实现速度的闭环控制。
倾角传感器模块主要是将陀螺仪信号进行放大滤波。选用的是InvenSense公司发行的一种6轴运动的整合性器件MPU6050,即3轴陀螺仪传感器以及3轴加速度传感器,能在外围连接磁力传感器,并运用本身的数字运动处理器以及II C接口,把所测得的模拟量转换为数字量,最终传达至主控芯片,但要获取实际的角度值以及角速度值,仍需一个转换关系,才能得到二者的实际值。
4 具体分析小车的反馈控制PID调节器
首先分析自平衡双轮移动小车的模型,将系统进行解耦,并在平衡点位置进行线性化处理,得到小车的简单模型。分析并验证所得简化模型的能控能观性。在此基础上分别采用经典 PID 控制规律、极点配置这两种方法设计相对应的平衡控制器,以实现小车的动态平衡控制。
为得到更确切的车体倾角值,降低陀螺仪的漂移、车体摆动等对小车加速度计的干扰,需要对陀螺仪与加速度计的输出值进行融合,本设计将采用卡尔曼滤波算法进行数据融合。该算法属于一类效率很高的递归滤波器,可从一连串复杂的噪声测试中,估算出动态系统的姿态。当小车失去平衡时,该PID算法就会起作用,处理小车车体的角度与角速度值,产生实时的PWM波形,用以驱动电机来让小车的车体维持平衡。
电机控制PID算法在小车电机控制中,倾角传感器得到的角度与角速度值的误差值作为其输入,其输出为电机的PWM占空比的大小。对于小车的控制,软件设计运用增量式PID算法用以维持系统稳定,分为三个环节:直立环、速度环、转向环。
4.1 直立环
本小车直立环采用PD控制器,实际上大多数控制系统只有P项或者PI控制就能满足要求,加上D项可以对干扰快速作出响应,所以利用PD控制器更好控制小车的直立。函数的参数为小车的倾角与Y轴陀螺仪,所设定的小车前进方向为MPU6050的X轴正方向,电机轴与Y轴平行。这时小车无任何抖动,很稳定,但不能维持长久的直立,会朝某一个方向快速倾倒,也即仅有直立环让小车保持很好的直立效果有点困难。
4.2 速度环
本小车速度环采用PI控制器,系统一旦出现偏差,控制器就会做出响应减少偏差,也可消除静差。随着反馈的速度值加大,闭环系统的超调量增大,P不宜调太大否则小车会不稳定,I虽然可以消除稳态误差,但是也会使系统稳定性下降,响应变慢,所以在调节I项时应与P项协调,可改善小车惯性、滞后等问题。
4.3 转向环
本小车转向环采用PD控制器,P项可以使小车方向恢复正确位置,若P增大时,小车方向恢复速度加快,但P不宜太大,否则会出现小车方向过冲现象,若D增大可以改善和抑制方向过冲的现象。所以转向环的调控参数不宜过大,否则会影响车模角度的控制。同时也得兼顾小车的方向和平衡直立的稳定性,协调直立环和速度环。
5 结束语
本设计主要K60DN512Z为控制芯片来处理小车系统的各种信息,主要运用卡尔曼滤波、MPU6050等模块信息采集以及寻迹模块等功能模块构成,采用可视化的开发方法,小车能够自动驾驶。由传统的四轮车转化为二轮自平衡车,自平衡车不仅要实现平衡控制,还要在自平衡的基础上,可由传感器反馈路况信息进行判断,实现前进、倒退和转向运动、上下坡、停车、过路肩等,自动化系数高,动力可靠,减少了车行覆盖面积,节省空间,适用于窄路及相关特殊场所行驶,且能进行通信交互遥控小车,具有普遍的实用价值及现实意义。
猜你喜欢
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
中学生数理化·八年级物理人教版(2017年6期)2017-11-09