
开伞攻角对火星探测器舱伞系统运动特性的影响分析
2018-11-12 03:58鲁媛媛荣伟吴世通
航天返回与遥感 2018年5期
鲁媛媛 荣伟 吴世通
开伞攻角对火星探测器舱伞系统运动特性的影响分析
鲁媛媛 荣伟 吴世通
(北京空间机电研究所,北京 100094)
火星探测器降落伞开伞前进入舱攻角(开伞攻角)会对舱伞系统的运动特性产生怎样的影响,是火星探测器减速着陆系统设计时必须搞清楚的问题。针对这一问题,文章以“火星探路者”为研究对象,将降落伞和进入舱分别视为6自由度刚体,建立了降落伞-进入舱以及中间弹性约束的两体12自由度动力学模型,研究了开伞攻角对火星探测器舱伞系统运动特性的影响。研究结果表明,开伞攻角越大,进入舱下降得越慢,开伞攻角对进入舱速度的影响主要体现在开伞后的前30s内;开伞攻角每增大10°,系统约产生600m的高度损失,开伞攻角的大小会对舱伞系统下降过程中的工作时序产生一定影响;开伞攻角越大,舱伞系统姿态越不稳定,姿态变化越剧烈。研究结论可为中国火星探测器降落伞减速系统的设计提供一定参考。
开伞攻角 运动特性 火星探测器 舱伞系统 减速着陆
0 引言
自从1960年10月10日前苏联发射第一颗火星探测器以来,火星就成为了人类发射探测器进行或准备进行探测最多的一颗外行星,特别是自20世纪90年代以来,基本上是每两年一次的发射窗口均有火星探测器发射,从未间断。截至2016年12月,人类已经进行了46次火星探测活动。虽然多次以失败告终,但这些任务拍摄了大量图片,获得了丰富的火星大气及表面数据,为之后的火星软着陆和人类登陆火星、建立火星基地打下了坚实的基础。根据各国未来的火星探测发展规划,未来30年,火星探测仍将是世界各国深空探测领域的热点和重点[1]。
火星探测器的进入、下降与着陆(Entry,Decent and Landing,EDL)过程是直接关系到火星探测器能否成功登陆火星的关键环节。由于火星表面存在大气,火星探测器采用与地球再入和返回类似的方式,在下降阶段均采用降落伞进行减速[2]。火星探测器的EDL过程一般分为三个阶段:首先是从进入火星大气到下降到距火星表面5~10km的高度,此阶段依靠探测器自身气动外形进行气动减速;第二阶段利用降落伞进一步减速;最后是利用着陆缓冲手段实现着陆器在火星表面软着陆[3]。
降落伞开伞前进入舱的攻角是美国火星探测器减速着陆系统设计时重点考虑的一个因素。在一系列已发射的火星探测器中,对开伞攻角给予了高度重视,对开伞攻角给出了明确的要求。在“海盗号”的研制过程中,为避免降落伞拉直过程中产生严重的“绳帆”现象影响降落伞正常充气,明确规定开伞攻角不能超过13°[4]。在最新一代火星探测器“火星科学实验室”中,不惜增加系统质量,在进入舱内特意设计了6个质量块,在降落伞开伞前15s,通过将质量块依次分离,改变进入舱的质心位置,将攻角降至零[5,6]。在舱伞系统减速下降过程中,一些敏感测量装置(如雷达高度计)对舱伞系统下降过程中的运动稳定性存在一定要求,当进入舱角速率>100°/s或进入舱纵轴与垂直方向的夹角>40°时,将会导致雷达高度计的工作性能下降[7]。
开伞攻角如何影响火星探测器舱伞系统的运动特性,是火星探测器减速着陆系统设计时需要搞清楚的问题,本文将就此问题展开深入研究。
1 舱伞系统动力学模型的建立
1.1 进入舱动力学模型
进入舱采用基于旋量形式的牛顿—欧拉方程的一般刚体动力学方程[8],忽略附加质量和附加质量变化率对进入舱运动的影响,如式(1)所示。
进入舱所受的外力有重力、气动力、吊带约束力,所受的外力矩有重力矩、气动力矩、吊带约束力矩和气动阻尼力矩,可表示为
式中1为进入舱重力;a1为进入舱所受的气动力;c1为吊带对进入舱的约束力;c1为吊带约束力矩;a1为进入舱质心的位置矢量;cp为进入舱压心的位置矢量;d1为进入舱的气动阻尼力矩。
1.2 降落伞动力学模型
降落伞的一般动力学方程为:

降落伞所受外力包括重力、气动力和吊带约束力,可表示为

式中2为降落伞的重力;a2为降落伞的气动力;c2为吊带对降落伞的约束力;c2为吊带约束力矩;c2为降落伞质心的位置矢量;d2为降落伞的气动阻尼力矩。

1.3 约束模型
考虑到伞绳和吊带材料的非线性弹性效应,为简化分析,作出如下假设:
1)近似取吊带与伞衣轴线之间的夹角为0°。吊带通过旋转接头与吊索相连,因此降落伞与进入舱的旋转速率完全独立,不发生耦合;
3)将垂挂吊索视为刚性绳,认为其固连于进入舱上。
伞绳和吊带的张力可由下式求解:
2 仿真分析
2.1 模型验证
本文仿真以“火星探路者”作为研究对象,首先利用其相关数据进行模型验证,将本文仿真结果与文献[9]中的仿真结果进行对比来验证模型的准确性和有效性。舱伞系统参数和环境参数参考文献[10-14]。仿真中考虑降落伞的充气过程,降落伞充气过程中阻力面积随时间的变化采用文献[10]提供的数据。
图2是进入舱垂直下降速度的本文仿真结果与文献仿真结果的对比。图中可以看出,本文仿真结果与文献仿真结果非常接近。图3(a)中虚线是进入舱攻角的文献仿真结果,可以看出,约20s后进入舱攻角达到0°左右的配平攻角,攻角的数值振荡幅度呈周期性变化,最大值约为±6°,最小值约为±2°。图3(b)中本文的仿真结果与图3(a)中的文献仿真结果基本一致。造成本文仿真结果与文献仿真结果偏差的原因主要是:1)初始条件偏差;2)大气参数、结构参数等其它参数可能与文献存在一定偏差。总体而言,仿真模型具有较高的准确性。
2.2 开伞攻角对进入舱运动特性的影响
仿真工况设置见表1,通过对比开伞攻角分别为0°、–10°、–20°、–30°时进入舱的运动学特性和动力学特性,研究开伞攻角对火星探测器舱伞系统减速下降过程动力学特性的影响。
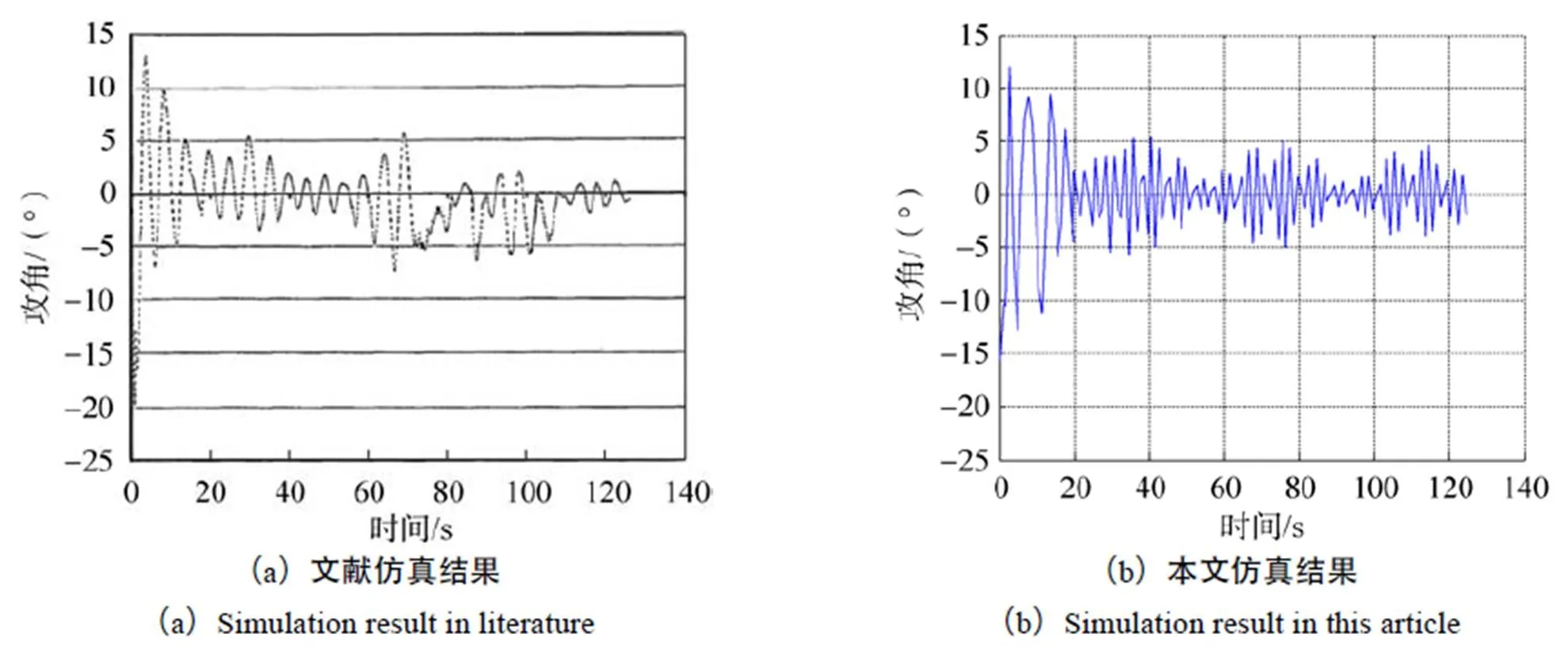
图3 进入舱攻角变化对比
表1 “火星探路者”开伞前进入舱初始参数

Tab.1 Initial parameters at Mars Pathfinder parachute deployment
图4是不同攻角对应的进入舱高度随时间的变化曲线。图中可以看出,攻角(绝对值)越大,进入舱下降得越慢。30s时,0°、–10°、–20°、–30°攻角对应的进入舱高度分别为5 050m、5 650m、6 250m、6 900m,因此开伞攻角每增大10°,舱伞系统达到稳定下降速度后,相同时刻对应的进入舱高度约增加600m,即产生约600m的高度损失。在舱伞系统下降过程中,防热罩分离、着陆反推发动机点火等动作通常是根据雷达测高计实时测量的高度为依据[15-19],因此,开伞攻角的大小会对舱伞系统下降过程中的工作时序产生一定影响。
图5是不同开伞攻角对应的进入舱摆角(定义为进入舱纵轴与垂直方向的夹角)的变化曲线。当攻角分别为0°、–10°、–20°、–30°时,系统稳定后进入舱摆角的均值分别约为3°、8°、11°、12°,摆动幅度分别为1.8°、10.4°、14.5°、15.1°。由此可见,进入舱摆动幅度及系统稳定后摆角的平衡位置均随着开伞攻角的增大而增大,开伞攻角越大,进入舱姿态越不稳定。
图6是不同开伞攻角对应的进入舱角速度的变化曲线。当开伞攻角分别为0°、–10°、–20°、–30°时,角速度最大值分别为33.5°/s、115.8°/s、160.0°/s、176.5°/s,稳定后角速度的均值分别约为17°/s、28°/s、48°/s、55°/s,数值振荡幅度分别约为10°/s、25°/s、62°/s、80°/s。这表明进入舱角速度及系统稳定后角速度的均值随着开伞攻角的增大而增大,开伞攻角越大,进入舱的姿态变化越剧烈。
3 结束语
本文建立了火星探测器舱伞系统的两体12自由度动力学模型,研究了开伞攻角对舱伞系统减速下降过程运动特性的影响。可得出以下结论:
1)开伞攻角越大,进入舱下降越慢,这种影响主要体现在降落伞开伞后的前30s内,约30s后,系统达到稳降速度,不同攻角对应的进入舱速度基本一致。
2)开伞攻角每增大10°,系统约产生600m的高度损失。开伞攻角的大小会对舱伞系统下降过程中的工作时序产生一定影响。
3)开伞攻角越大,舱伞系统空间夹角越大,系统姿态越不稳定,进而影响舱伞系统减速下降过程中的一些敏感测量装置的工作性能。
因此,为了使舱伞系统减速下降过程中的姿态稳定,应尽量降低开伞前进入舱的攻角。
[1] 李大耀. 论航天火星探测[J]. 航天返回与遥感, 2003, 24(3): 59-62. LI Dayao. On Mars Exploration by Space Probe[J]. Spacecraft Recovery & Remote Sensing, 2003, 24(3): 59-62. (in Chinese)
[2] 荣伟, 陈国良. 火星探测器减速着陆技术特点[J]. 航天返回与遥感, 2010, 31(4): 1-6. RONG Wei, CHEN Guoliang. The Characters of Deceleration and Landing Technology on Mars Explorer[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(4): 1-6. (in Chinese)
[3] 包进进, 荣伟. 火星探测器进入阶段稳定性分析[J]. 航天返回与遥感, 2011, 32(2): 6-13. BAO Jinjin, RONG Wei. The Characters of Deceleration and Landing Technology on Mars Explorer[J]. Spacecraft Recovery & Remote Sensing, 2011, 32(2): 6-13. (in Chinese)
[4] 鲁媛媛, 荣伟, 吴世通. 火星探测器降落伞拉直过程中的“绳帆”现象研究[J]. 宇航学报, 2014, 35(11): 1238-1244. LU Yuanyuan, RONG Wei, WU Shitong. Study on Line Sail During Mars Probe Parachute Deployment[J]. Journal of Astronautics, 2014, 35(11): 1238-1244. (in Chinese)
[5] DEVIN K, MIGUEL S M, JOHN E, et al. Mars Science Laboratory Entry, Descent, and Landing Triggers[C]//IEEE Aerospace Conference. Big Sky, MT, 2007.
[6] DAVID W W, RICHARD W P, ALLEN C. Mars Science Laboratory: Entry, Descent, and Landing System Performance[C]//IEEE Aerospace Conference. Big Sky, MT, 2007.
[7] QUEEN E, DESAI P, PRINCE J. Multibody Modeling and Simulation for Mars Phoenix Entry, Descent, and Landing[J]. Journal of Spacecraft and Rockets, 2008, 48(48): 765-771.
[8] 耿长福. 航天器动力学[M]. 北京: 中国科学技术出版社, 2006: 60-68. GEN Changfu. Spacecraft Dynamics[M]. Beijing: China Science &Technology Press, 2006: 60-68. (in Chinese)
[9] WITKOWSKI A. Mars Pathfinder Parachute System Performance[C]//15th CEAS/AIAA Aerodynamic Decelerator Systems Technology Conference. Toulouse, France, 1999.
[10] FALLON I E. System Design Overview of the Mars Pathfinder Parachute Decelerator Subsystem[C]//14th AIAA Aerodynamic Decelerator Systems Technology Conference. San Francisco, CA, 1997.
[11] DESAI P N, SCHOFIELD J T, LISANO M E. Flight Reconstruction of the Mars Pathfinder Disk-gap-band Parachute Drag Coefficients[J]. Journal of Spacecraft and Rockets, 2005, 42(4): 672-676.
[12] SPENCER D A, BRAUN R D. Mars Pathfinder Atmospheric Entry: Trajectory Design and Dispersion Analysis[J]. Journal of Spacecraft and Rockets, 1996, 33(5): 670-676.
[13] PENG C Y, TSANG S K, SMITH K. Model Correlation for Mars Pathfinder Entry, Descent and Landing Simulation[C]// IEEE Aerospace Conference. Snowmass, USA, 1997.
[14] SPENCER D A, BLANCHARD R C, BRAUN R D. Mars Pathfinder Entry, Descent, and Landing Reconstruction[J]. Journal of Spacecraft and Rockets, 1996, 36(36): 357-366.
[15] HUSSONG J, LAU R. The Viking Mars Lander Decelerator System[C]//AIAA Aerodynamic Decelerator Systems Technology Conference, 4th. Palm Springs, Calif, USA, 1973.
[16] THURMAN S. Return to the Red Planet: An Overview of the Mars Pathfinder Mission[C]//13th AIAA Aerodynamic Decelerator Systems Technology Conference. Cleanwater Beach, FL, 1995.
[17] RONCOL I, RALPH B L, JAN M. Mission Design Overview for the Mars Exploration Rover Mission[C]//AIAA/AAS Astrodynamic Specialist Conference and Exhibit. Monterey, CA, 2002.
[18] GROVER M R, CICHY B D, DESAI P N. Overview of the Phoenix Entry, Descent and Landing System Architecture[J]. Journal of Spacecraft & Rockets, 2008, 48(5): 706-712.
[19] SENGUPTA A, STELTZNER A, WITKOWSKI A. An Overview of the Mars Science Laboratory Parachute Decelerator System[C]// IEEE Aerospace Conference. Big Sky, MT, 2007.
Analysis of Influences of Attack Angle on Motion Characteristic of Mars Probe Parachute-vehicle System
LU Yuanyuan RONG Wei WU Shitong
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
The effect of the attack angle of vehicle before parachute deployment on the motion characteristics of Mars probe parachute-vehicle system is an important issue in the design of the deceleration landing system. To solve this problem, Mars Pathfinder is taken as study object, the parachute and vehicle are treated as 6-DOF rigid bodies, a 12-DOF dynamic model about parachute-vehicle and flexibility constraint between them is established. Influences of attack angle on motion characteristics of parachute-vehicle system of Mars probe are studied. The study results show that the larger the attack angle, the slower the vehicle descend, the influence of the attack angle in the speed of vehicle is mainly reflected in the first 30 seconds after the parachute deployment; the attack angle increases 10 degrees, and the system produces a height loss of 600m, thus the attack angle has an effect on the working timing of the descending process; the larger attack angle is, the more instability attitude of parachute-vehicle system will be. The conclusion can provide technology reference for the design of the Mars probe parachute system.
attack angle; motion characteristic; mars probe; parachute-vehicle system; deceleration landing
V529.1
A
1009-8518(2018)05-0042-07
10.3969/j.issn.1009-8518.2018.05.006
鲁媛媛,女,1983年生,2015年获中国空间科学技术研究院飞行器设计专业博士学位,工程师。研究方向为航天器返回与着陆技术。E-mail: quaner527@aliyun.com。
2018-05-08
(编辑:刘颖)
猜你喜欢
凤凰生活(2019年10期)2019-10-14
宇航总体技术(2019年5期)2019-10-11
兵器装备工程学报(2019年7期)2019-08-13
北京青年周刊(2018年38期)2018-09-25
汽车零部件(2018年8期)2018-09-06
小资CHIC!ELEGANCE(2017年21期)2018-03-30
小溪流(画刊)(2017年11期)2018-01-09
创新作文(1-2年级)(2016年12期)2016-12-26
高中生·青春励志(2014年11期)2014-11-25
