
连杆机构在仿生类科普展品中的应用
2018-11-23 07:23洪先亮李瑞敏方猛仝文浩刘卫庄合肥通用机械研究院有限公司
安徽科技 2018年6期
◎文/洪先亮 李瑞敏 方猛 仝文浩 刘卫庄(合肥通用机械研究院有限公司)
机械类展品一直是科技馆中不可或缺的重要组成部分,因具有较高的趣味性和较强的互动性而备受青睐,而连杆机构更是众多机械结构里较为经典的一种。传统的连杆类展品多采用直观演示的方法,虽能展示相关原理,但大多数结构过于简单,演示现象也较为枯燥。研究发现,生物所具备的功能比迄今任何人工制造的机械都优越得多[1],这些生物的结构和功能在机械设计方面给了人们很多启发,如果能将仿生与连杆机构结合到一起,可以开拓出一种机械类展品的新模式。

自然界中的生物虽种类繁多,但在行为动作方面却有着许多相似之处,如鸟类的飞翔动作就有许多共性。将这些共性动作进行分析总结,选择具有代表性的物种,并运用连杆机构进行动作拟合,可设计出一系列连杆仿生类科普展品。
一、连杆机构的理论基础
平面连杆机构是由若干构件用低副(转动副、移动副)连接组成的平面机构[2]。最简单的平面连杆机构由4个构件组成,称为平面四杆机构,常见类型为曲柄摇杆机构(图 1a)、双曲柄机构(图 1b)、双摇杆机构(图 1c)。平面连杆机构主要用于实现某些特定轨迹、位置或运动规律的运动,实现从动件运动形式及运动特性的改变等。
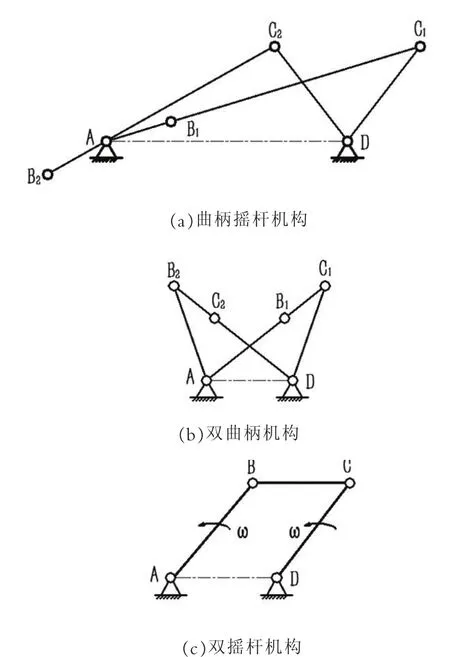
图1 平面四杆机构
连杆机构具有形状简单易加工、承载能力大、运动轨迹多样等优点[3],但设计难度较大。连杆机构的设计,首先要根据工作的需要选择功能合适的机构类型,再按照所给定的运动要求和其他附加要求(如传动角的限制等)确定机械运动简图的尺寸参数[4]。连杆机构的设计方法有解析法、几何作图法和实验法,解析法比较精确,作图法比较直观[5],实验法常需要试凑。
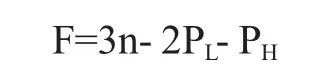
连杆机构的运动轨迹较难控制,实现特定运动要求需保证连杆机构具有确定的相对运动。而机构具有确定相对运动的必要条件为:运动链的自由度必须大于零,主动构件数等于运动链的自由度[6]。若运动链中包括固定构件在内共有N个构件,除去固定构件后,运动链中的运动构件数n=N-1。设运动链中低副(回转副或移动副)数目为PL个,高副(滚滑副)数目为PH个,则自由度F的计算公式为:
计算连杆机构自由度时需注意三个问题:当m(m≥3)个构件在同一轴线上用回转副相联接构成复合铰链[7]时(见图2a),算作m-1个回转副;排除不影响机构中输出与输入关系的局部自由度(见图2b);排除重复约束的虚约束(见图2c)。

图2 自由度计算特例
二、连杆机构的仿生应用
1.机械鸟
鸟类飞行时翅膀作扇动等动作,机械鸟展品由曲柄摇杆机构衍生而来,并结合球头关节实现鸟类飞行动作的拟合,除去传动机构,该展品的关键结构如图3所示。机械鸟的飞行动作拟合模块主要由曲柄、连杆、摇杆、球头关节等组成,曲柄为主动构件,球头关节的球头端固定于连杆上,连杆在平面内的平移和转动动作带动球头关节,使其空间位姿发生改变,并带动翅膀实现翻转扇动等动作。

图3 机械鸟关键结构
该展品的飞行动作拟合模块的运动构件数目为6个,其中转动副为8个,高副为1个,代入自由度计算公式得该运动链自由度为1。因曲柄为主动构件,故该飞行动作拟合模块具有确定的相对运动(最终效果见图4)。

图4 机械鸟效果图
2.机械马
马的奔跑动作主要特征是四肢交替前踢和后蹬,机械马展品的动作拟合模块由数个曲柄摇杆机构并联而成。由于四肢运动模块均采用相同结构,因此以左前腿为例讲述机械马的工作原理。如图5所示,机械马主要由曲柄转盘、连杆1、摇杆1、联动杆1、连杆2、摇杆2、联动杆2等组成,各连杆构件之间采用转动副联接。曲柄转盘、连杆1、摇杆1组成曲柄摇杆机构1,曲柄转盘、连杆2、摇杆2组成曲柄摇杆机构2。通过联动杆1和联动杆2将这两个曲柄摇杆机构并联起来,以曲柄转盘为主动构件,使两个曲柄摇杆机构作联动运动,实现马的奔跑动作。
机械马的动作拟合模块运动构件数目为7个,转动副为8个,复合铰链处转动副为2个,故转动副数目为10个,高副数目为0个,代入自由度计算公式可得该运动链自由度为1。因曲柄转盘为主动构件,故机械马动作拟合模块具有确定的相对运动(最终效果见图6)。

图5 机械马关键结构

图6 机械马效果图
3.机械花
机械花展品主要模拟莲花的闭合与开放状态。当莲花闭合时,花瓣收拢,花苞呈细长状;当莲花开放时,花瓣张开,层层堆叠。该展品主要通过曲柄滑块机构驱动花瓣实现莲花的张开与闭合动作,各花瓣作同步联动运动。如图7所示,该展品动作拟合模块主要由曲柄、连杆、滑块、花瓣等组成。滑块与花瓣通过销槽副联接,滑块上下往复移动带动花瓣绕机架转动,从而实现花瓣的开合动作。
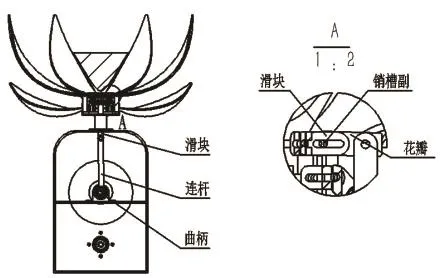
图7 机械花关键结构
机械花的动作拟合单元运动构件数目为4个,转动副为4个,移动副为1个,销槽副为1个,代入自由度计算公式得运动链自由度为1。因曲柄为主动构件,故该机构具有确定的相对运动(最终效果见图8)。

图8 机械花效果图
三、总结与展望
连杆机构在科普展品中应用较为广泛,将简单的平面连杆机构通过串并联或者联动的方式结合起来,可以得到意想不到的运动轨迹。本文以机械鸟、机械马和机械花为例讲述了连杆机构在仿生类科普展品中的应用,并提供了关键部件的设计方案和计算方法,为将来其他种类的连杆仿生展品研制提供借鉴。
除了连杆机构,还有许多经典机械结构可以考虑“仿生化”,如齿轮传动机构、凸轮传动机构、槽轮传动机构等,也可以将这些经典结构组合,开发出大体量综合型仿生展品。该类展品可以以主题形式组合展示,具有较高的趣味性和吸引力,对提升观众对于机械的学习兴趣有着重要意义。
猜你喜欢
南方农机(2021年3期)2021-02-07
中阿科技论坛(中英阿文)(2020年2期)2020-05-27
数码世界(2017年12期)2017-12-28
新商务周刊(2017年5期)2017-10-16
汽车实用技术(2017年16期)2017-09-21
中国自行车·骑行风尚(2014年2期)2014-05-07
汽车实用技术(2014年9期)2014-02-20
汽车与新动力(2013年6期)2013-03-11
汽车与新动力(2012年5期)2012-03-25
