
变胞汽车焊接机器人拓扑分析与动态焊接参数建模
2018-11-26 09:47胥刚刘国
山东工业技术 2018年20期
胥刚 刘国
摘 要:变胞机构是基于机构运动过程中构件数目的变化和自由度的变化为特征的机构。本文研究的变胞汽车焊接机器人,为克服现有技术不足,提出变胞汽车焊接机器人;并使用了关联矩阵及其逻辑运算对变胞过程进行描述和建立变胞焊接机器人动态焊接参数运动学模型,为后面进行运动学仿真和动力学仿真奠定基础。
关键词:变胞焊接机器人;焊接工艺参数设计;关联矩阵;拓扑分析
DOI:10.16640/j.cnki.37-1222/t.2018.20.037
0 引言
传统的汽车焊接装置大多为串联的焊接机器人,这种串联焊接机器人工作空间小,机构动力性差,可靠性差,给汽车焊接带来不便,不能满足现代社会的要求,因此急需一种全新的汽车焊接装置,能够适应不同焊接环境的需要。
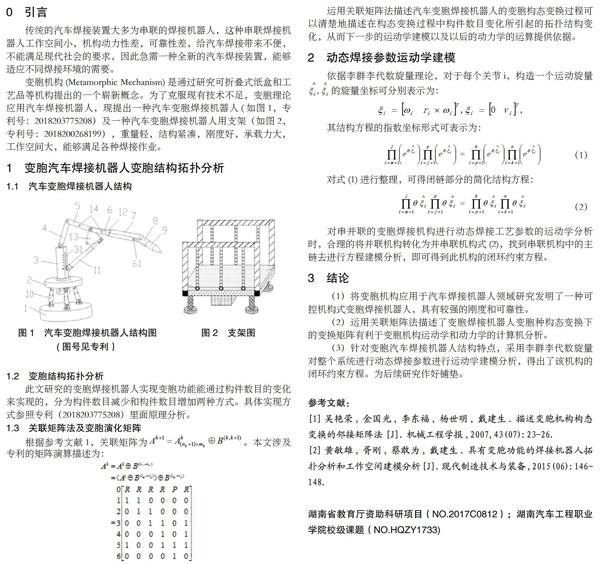
变胞机构(Metamorphic Mechanism)是通过研究可折叠式纸盒和工艺品等机构提出的一个崭新概念。为了克服现有技术不足,变胞理论应用汽车焊接机器人,现提出一种汽车变胞焊接机器人(如图1,专利号:2018203775208)及一种汽车变胞焊接机器人用支架(如图2,专利号:2018200268199),重量轻,结构紧凑,刚度好,承载力大,工作空间大,能够满足各种焊接作业。
1 变胞汽车焊接机器人变胞结构拓扑分析
1.1 汽车变胞焊接机器人结构
1.2 变胞结构拓扑分析
此文研究的变胞焊接机器人实现变胞功能能通过构件数目的变化来实现的,分为构件数目减少和构件数目增加两种方式。具体实现方式参照专利(2018203775208)里面原理分析。
1.3 关联矩阵法及变胞演化矩阵
运用关联矩阵法描述汽车变胞焊接机器人的变胞构态变换过程可以清楚地描述在构态变换过程中构件数目变化所引起的拓扑结构变化,从而下一步的运动学建模以及以后的动力学的运算提供依据。
2 动态焊接参数运动学建模
对串并联的变胞焊接机构进行动态焊接工艺参数的运动学分析时,合理的将并联机构转化为并串联机构式(2),找到串联机构中的主链去进行方程建模分析,即可得到此机构的闭环约束方程。
3 结论
(1)將变胞机构应用于汽车焊接机器人领域研究发明了一种可控机构式变胞焊接机器人,具有较强的刚度和可靠性。
(2)运用关联矩阵法描述了变胞焊接机器人变胞种构态变换下的变换矩阵有利于变胞机构运动学和动力学的计算机分析。
(3)针对变胞汽车焊接机器人结构特点,采用李群李代数旋量对整个系统进行动态焊接参数进行运动学建模分析,得出了该机构的闭环约束方程。为后续研究作好铺垫。
参考文献:
[1]吴艳荣,金国光,李东福,杨世明,戴建生.描述变胞机构构态变换的邻接矩阵法[J].机械工程学报,2007,43(07):23-26.
[2]黄敏雄,胥刚,蔡敢为,戴建生.具有变胞功能的焊接机器人拓扑分析和工作空间建模分析[J].现代制造技术与装备,2015(06):146-148.
湖南省教育厅资助科研项目(NO.2017C0812);湖南汽车工程职业学院校级课题(NO.HQZY1733)
