
一种足下垂康复助力机构的设计*
2018-11-27 05:08李伟达李龙委夏子玉
机电工程 2018年11期
李 娟,许 坤,李伟达,李龙委,夏子玉,万 欢
(苏州大学 江苏省机器人与微系统研究中心,江苏 苏州 215000)
0 引 言
近年来,由于脑中风引起足下垂患者的数量庞大。足下垂导致患者足尖着地、拖拽,行走时呈现典型的“画圈步态”,对患者的日常生活带来很大的不便。恢复和提高肢体运动功能,除了必要的医疗手段外,科学的康复训练也是十分有效的[1-3]。目前,治疗足下垂的康复方法有减重步行[4]、功能性电刺激疗法、医护人员康复训练法和穿戴式踝关节外骨骼法。
减重步行训练对早期足下垂患者步行功能恢复具有明显促进作用,但是这种方法是在一个特定的环境中训练的;电刺激疗法的缺点是容易使被刺激的肌肉产生疲劳甚至是劳损[5];医护人员康复训练法局限于医护人员的数量和经验,难以得到客观定量的康复训练评价指标[6]。
康复机器人近年来发展迅速,但很多因素阻碍了这种增强功能型外骨骼的进一步发展,比如附加质量问题、有限的机械功率和能源供给问题[7]。
美国麻省理工大学(MIT)开发了一种用于足下垂患者的可变阻尼的踝关节康复系统[8-9],它采用串联式弹性驱动器作为驱动部件,该装置可以辅助患者行走,但是在整个步态训练中的下肢支撑相末期相位不能提供有效助力,存在重心无法前移的问题和下肢承载不均的问题;美国密西根州立大学设计了一款单自由度气动驱动的足踝外骨骼,该系统将气动元件作为背屈运动的动力源,采用生物信号的控制方法,采集小腿比目鱼肌的肌电信号作为控制信号参考[10],该机构虽然可以帮助患者实现正常的步态,但是该外骨骼笨重的气源和复杂的控制网络给患者的使用带来极大的不便。
针对上述情况,本文将设计一种对称式的混合动力足下垂康复助力机构。
1 正常人体步态划分
人体步态相位及踝关节角度如图1所示。
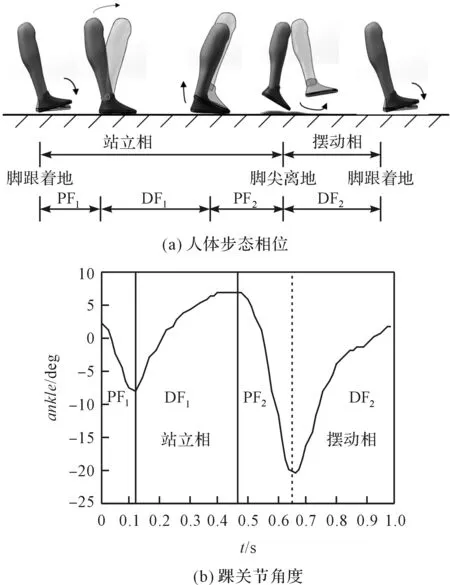
图1 人体步态相位及踝关节角度
众所周知,同一只脚连续两次触地被称为一个步态周期,分为站立相和摆动相,其中站立相时脚掌着地,摆动相时脚掌离开地面。在一个步态周期里,踝关节经历4种不同的弧线运动,每一次步态中,踝关节两次交替出现趾屈运动(PF)和背屈运动(DF)[11]。在站立相期间,踝关节出现了3次弧线运动,(PF1,PF2,DF1);在摆动相期间,踝关节只是背屈(DF)。
脚跟触地时,踝关节角度在3°~5°,角速度为零,踝关节进入第一次趾屈。脚掌放平后,脚踝改变它的运动方向做背屈运动,脚跟离地时,踝关节做第二次趾屈运动;脚尖离地后,踝关节做背屈运动便于脚踝的摆动;脚尖离地时,踝关节角度大约为-20°。
2 人体步态相位检测
对于人体步态相位的划分是根据足部与地面的接触关系进行,因此,通过足底力传感器检测足部与地面是否接触,可以判断步态相位。
传感器安装及步态相位识别如图2所示。
为了准确判断步态相位,本研究安装4个薄膜型压力传感器。在足跟处粘贴一个足底力传感器;在前脚掌处粘贴3个足底力传感器,分别粘贴在足尖,第一跖骨和第四跖骨处,原因是前脚掌着地时与地的接触位置不具有对称性而且面积比较分散,只要3个传感器中的一个有信号就可以判断足尖着地。
小圆圈表示传感器的状态,黑色实心圆表示足底压力传感器受到足够的压力,检测到有效的触地信号,空心圆表示足底压力传感器受到的压力小于阈值,所在部位未着地或未有效着地,其中1~3号传感器中只要有一个传感器检测到有效信号就表示这3个传感器检测到了信号;虚线方框表示足底压力传感器所对应的步态事件;大圆圈则表示下肢经过一定步态事件后所相应到达的步态相位。
足底力传感器模块由4片FSR 402型压力传感器、一块Arduino Uno R3开发板、Arduino Sensor Shield传感器扩展板、SD数据卡及其电路组成,下肢步态检测系统如图3所示。
3 足下垂康复助力机构设计
3.1 设计依据
与正常人体步态相比,足下垂患者并没有足跟着地这一时刻,而是整个脚掌着地,在摆动相时期,足处于跖屈位且完全不能主动背屈,而且伴有足内翻。为了能够帮助足下垂患者正常行走,主要考虑因素包括:
(1)避免患者整个脚掌着地,帮助患者足跟着地,缓慢的将脚掌触地以防患者因为重心过渡不稳导致跌倒;
(2)在摆动相,帮助患者进行背屈动作,完成廓清运动;
(3)克服患者足内翻的问题,以防患者脚掌内侧先着地导致患者踝关节损伤。
根据以上要求,本文设计一款对称式、混合动力踝关节背屈助力机构。该助力机构主要由两个压簧和线驱动执行器组成。压簧作为一个储能的元件,电机和压簧串联连接。首先,压簧的使用不仅减少了对电机力矩的要求;其次,实现了患者脚跟着地的缓冲和储能作用。以压簧和电机共同作为驱动方式减小了对能量的消耗,同时增加压簧进行储能以实现局部能量的再利用,降低了整个系统的功率,以及对电池的要求。该机构采用对称式的机构,使用两根拉杆帮助患者背屈,克服了患者足内翻的问题。
3.2 结构设计
机构原理及三维模型如图4所示。
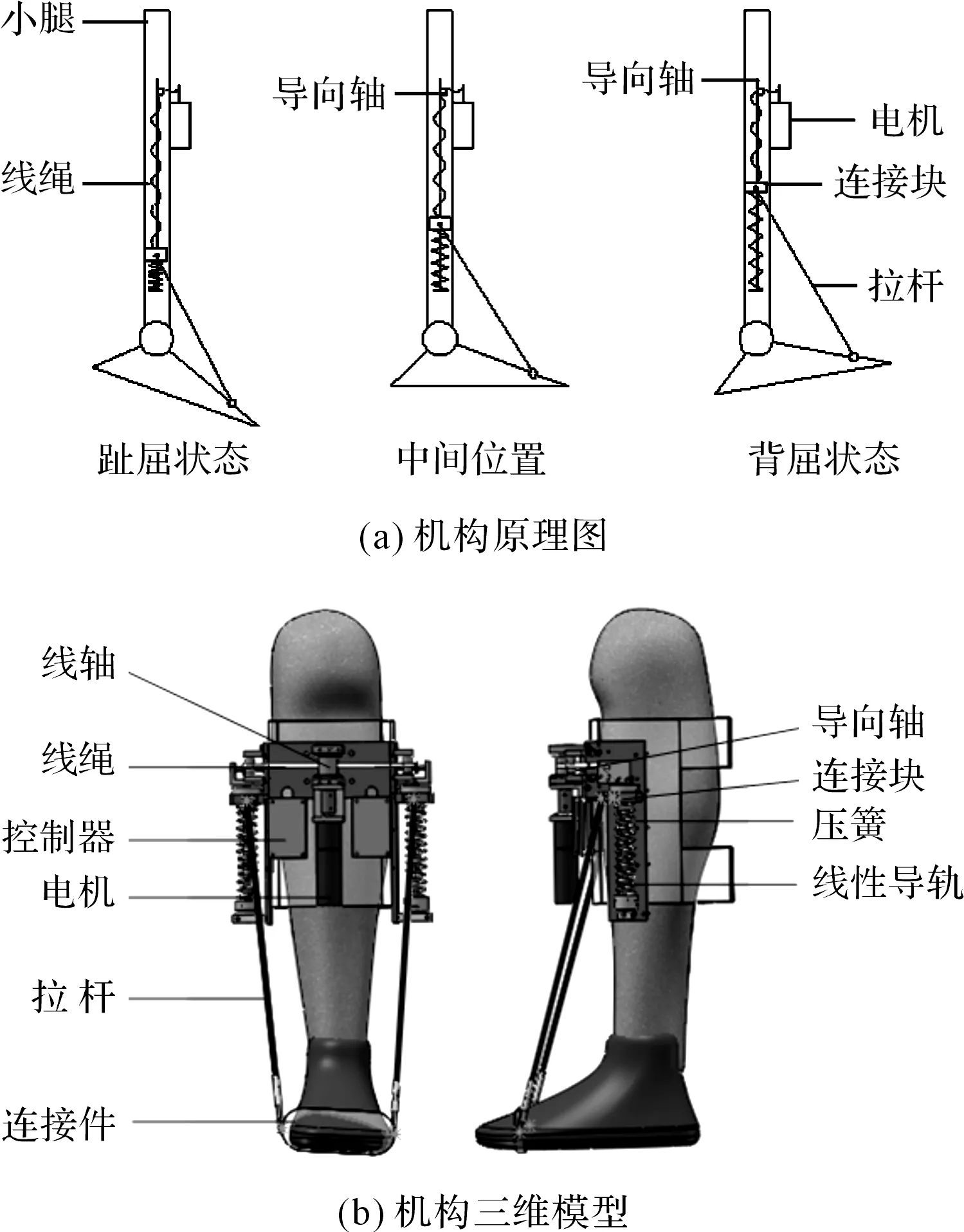
图4 机构原理及三维模型
通过线绳的拉动和压簧弹力的释放,两侧的拉杆被拉起,从而带动踝关节做背屈运动;当踝关节趾屈时,通过拉杆,压簧被压缩,线绳逐渐被释放。
该机构由5部分组成:一对6063铝合金拉杆、两个压簧、一对线性导轨、一个线驱动执行器和一个锂电池及控制器。铝合金拉杆一端固定在连接件上(连接件固定在脚的跖趾关节处),另一端固定在连接块上,。在跖趾关节处,一对铝合金拉杆分别固定在连接件的内外两侧。当压簧和线驱动执行器同时工作拉动连接块时,通过拉杆,拉力会被转化成关于踝关节的力矩,拉杆的作用是充当力臂(150 mm,距离踝关节)帮助使用者背屈。
该机构使用了一个定制的线驱动执行器,线驱动执行器由一个有刷电机驱动,选用电机的功率为70 W,型号为maxon DCX 26L。运行时,线驱动执行器由电机驱动,经一个减速比为35∶1的行星齿轮减速器,带动一个直径为20 mm的线轴转动。线驱动执行器有一个线轴,两个导向轴和一根尼龙绳组成。一根直径为4 mm的尼龙绳围绕线轴转动,绳子的两端分别固定在两个连接块上。线性导轨由一个导向轴、一个导向轴承和连接块组成,其中连接块固定在导向轴承上,同时下部与压簧接触,受压簧的推力和绳子的拉力;导向轴承沿着导向轴上下移动并通过向上运动带动拉杆使得踝关节做背屈运动。该机构通过低温热塑板和绑带固定在患者小腿上,机构实物图如图5所示。
图5 机构实物图
3.3 助力原理
足下垂助力机构主要由步态检测、压簧、线驱动和PID控制器构成,根据足底压力估计步态相位,驱动电机运转,提供主动助力。当踝关节角度为零时,电机此时设定为零位。电机使踝关节背屈为正;反之,使踝关节趾屈为负。
第一阶段(PF1),当足跟着地时,电机反转通过传动装置缓慢释放线绳,防止患者整个脚掌瞬间着地,同时压簧被压缩储存能量;第二阶段(DF1),当足放平时,电机正转通过传动装置拉动线绳,压簧释放能量;当足跟离地时,电机反转通过传动装置快速释放线绳,防止阻碍足跟上抬,增加脚部蹬地力量,同时压簧被压缩储存能量,为摆动相提供助力;当足尖离地时,电机正转通过传动装置拉动线绳,压簧释放能量,帮助患者进行背屈运动,从而达到廓清运动的目的。
4 控制方法
当踝关节背屈时,电机和压簧作为力矩源使得滑块作直线运动,带动拉杆使得踝关节背屈。控制方法采用传统PID方法对直流有刷电机进行位置、速度双闭环控制。控制器采用ARM系列STM32F103RBT6。主控芯片自带正交编码器接口。
控制硬件及程序框图如图6所示。
驱动电路板采用H桥电路,可适应24 V~48 V、100 W以内的电机。在保证为患者提供助力的同时,在控制上增加了踝关节的保护机制;当踝关节角度达到最大的背屈角度,电机停止工作,以防对患者造成二次伤害。
实验装置及结果如图7所示。
结果显示:在电机的驱动下,踝关节角度与理想的踝关节角度十分相近,跟踪很好,可以较好地完成踝关节的动作。

图6 控制硬件及程序框图
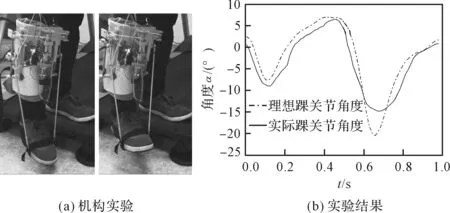
图7 实验
5 结束语
本文搭建了下肢步态相位检测系统、助力机构和整个系统的控制系统,并进行了机构可行性验证实验。结果表明:该机构可以较好地矫正并辅助足下垂患者的行走。
考虑到机构的重量问题,该机构采用压簧和线驱动结合的方式,压簧进行储能并且可以实现局部能量的再利用,降低了整个系统的功率,以及对电池的要求,减轻了机构的总体重量。下一步,本文将探讨把踝关节的运动轨迹更好地嵌入到助力机构的控制中。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
中老年保健(2021年7期)2021-08-22
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
西安交通大学学报(2016年10期)2016-12-22
铁道机车车辆(2016年3期)2016-10-25
中华骨与关节外科杂志(2016年6期)2016-05-17
中华骨与关节外科杂志(2016年3期)2016-05-17
中国民族医药杂志(2016年5期)2016-05-09
中国中医药现代远程教育(2014年23期)2014-03-01
