DWM1000模块的UWB机器人室内定位系统*
2018-12-07 08:32,,
单片机与嵌入式系统应用 2018年11期
,,
(1.浙江树人大学 信息科技学院,杭州 310015;2.史陶比尔(杭州)精密机械电子有限公司)
引 言
室内移动机器人定位是移动机器人设计的关键技术,由于室内环境GPS定位无法正常运行,主要采用激光导航SLAM定位方法、视觉定位方法。激光导航SLAM定位、视觉定位传感器价格昂贵,数据处理计算量大,实时性较差,目前应用成本较高,而且对于复杂环境,这两种方法不能提供很好的定位精度。所以,这里提出了采用UWB技术来实现室内复杂环境下的移动机器人定位。
1 UWB定位基本原理
UWB(超宽带)定位是近年来发展起来的一种定位方式,使用极窄的脉冲信号或者极宽的频谱带宽信号进行信息传递,具有穿透能力强、定位精度高等优点,具有厘米级的定位能力[1-2]。
UWB定位的常用方法有基于到达时间(TOA)、基于到达时间差(TDOA)、基于到达角度(AOA)、基于接收到信号强度指示(RSSI)4种[3-5]。这里采用TDOA作为UWB的定位方法。
到达时间差法TDOA的原理是通过测量不同基站接收同一个移动站定位信号的时间差,从而计算出同一个移动站到不同基站的距离差。知道移动点到不同基站的距离差,就可以通过三边定位法求得移动点的位置。
UWB定位的基本原理采用三边定位法[6],已知三点位置(x1, y1)、(x2, y2)、(x3, y3),已知未知点(x0, y0)到三点距离d1、d2、d3,以 d1、d2、d3为半径作三个圆,根据毕达哥拉斯定理,得出交点即未知点的位置计算公式:
上式通过最小二乘法求解最小方差得到坐标信息。
可以得到矩阵Hx=b,其中:
最终解为:x=(HTH)-1HTb。
2 系统总体架构
本设计为UWB定位系统。系统以STM32F103C8为主控制器,使用DWM1000模块进行通信,使用TOF算法测得两模块之间的距离。本系统由一个标签和三个基站组成,在标签分别得到三个基站的距离后,通过三边定位用最小二乘法求解得到坐标。
3 系统硬件设计
3.1 UWB定位模块设计
UWB定位模块采用DWM1000模块,可以通过控制相关寄存器实现工作状态的切换;采用SPI总线与主控芯片接口,速率最高达20 MHz;具有很好的抗多径干扰能力,非常适合室内复杂环境的定位应用。DWM1000模块由收发器、模式变换器、状态控制器、SPI接口电路组成,其原理图如图1所示。

图1 DWM1000模块原理图
DWM1000模块核心控制引脚有CS、SI、SO、SCLK,功能定义如表1所列,这里DWM1000模块为从设备,STM32F103为主设备。

表1 DWM1000模块核心控制引脚
3.2 主控制模块设计
主控制模块采用STM32F103C8芯片,工作频率为72 MHz;具有36个快速I/O端口,所有I/O口均可以映像到16个外部中断;配置有3个USART接口、1个CAN总线接口、2个I2C接口、2个SPI接口、2个I2S接口、1个USB接口;拥有2个12位模/数转换器,可以实现单次或者多次扫描转换;内部包含8个16位的定时器;采用LQFP48封装,具有体积小、易于集成的优势。
这里采用STM32F103C8的SPI总线接口实现对DWM1000模块的控制,主控制模块的原理图如图2所示。其中CS、SCLK、SO、SI为STM32F103C8的SPI数据总线;SW1、SW2、SW3、SW4为拨码输入,设置UWB定位模块的节点号;RXD、TXD用来实现外接无线模块,实现与上位机的无线通信;CAN_TX、CAN_RX为STM32F103C8的CAN总线接口,用来实现板级互联;SWCLK、SWDIO用来实现控制程序的SWD方式下载。

图2 STM32F103C8原理图
4 系统软件设计
系统软件采用的开发平台为Keil公司的Keil5,STM32F103采用SPI总线控制UWB定位模块DWM1000,主要软件模块有串口通信模块、SPI通信模块、时针模块、中断模块、定时器模块。STM32F103控制UWB定位模块的SPI控制时序图如图3所示。
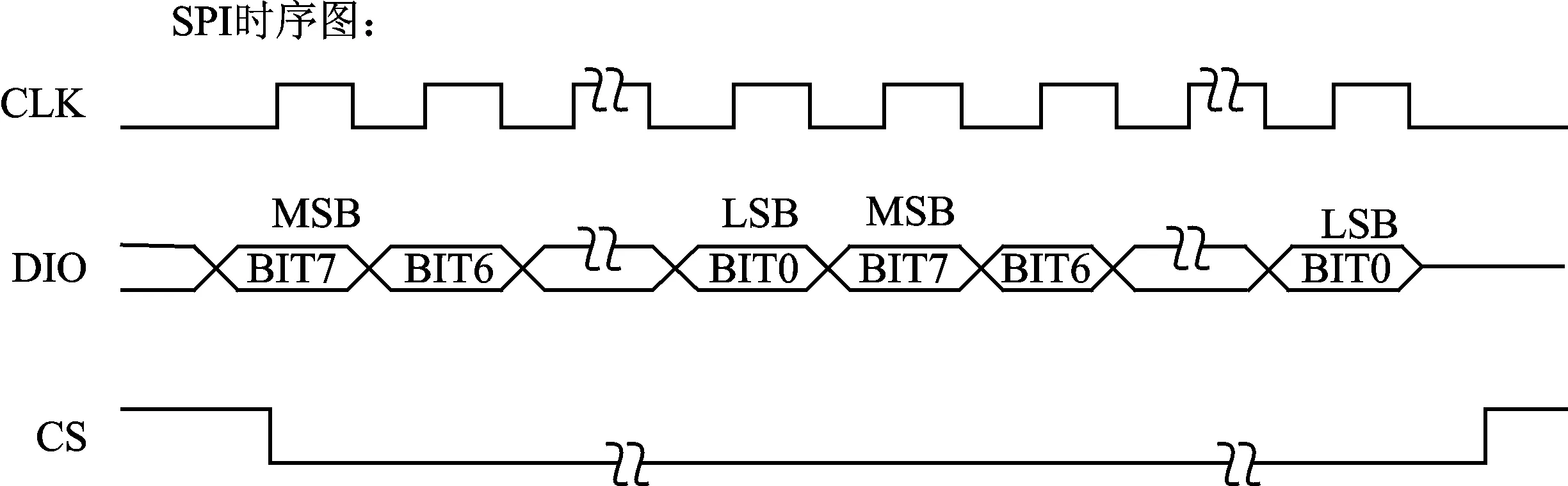
图3 UWB模块SPI控制时序图
通过SPI时钟极性(CPOL)和时钟相位(CPHA),STM32F103可以实现4种SPI模式。时钟极性CPOL=0时,SCLK在空闲状态为低电平;时钟极性CPOL=1时,SCLK在空闲状态为高电平。时钟相位CPHA=0时,数据线信号会在SCLK的奇数边沿采样;时钟相位CPHA=1时,数据线信号会在SCLK的偶数边沿采样。
这里采用时钟极性CPOL=0,时钟相位CPHA=0模式,SCLK在空闲状态为低电平,数据线信号会在SCLK的奇数边沿采样。SPI总线单次传输8位,高位MSB在前,这个可以通过STM32F103的SPI初始化程序配置,配置程序如下:
SPI_InitStructure.SPI_Direction=SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode=SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize=SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL=SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA=SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS=SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_32;
SPI_InitStructure.SPI_FirstBit=SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial=7;
SPI_Init(SPI1, &SPI_InitStructure);
其中SPI_Mode 设置STM32F103为主设备模式,SPI_DataSize 设置单次输出8位,SPI_CPOL设置SPI时钟极性为低电平,SPI_CPHA设置SPI为奇数边采样,SPI_FirstBit设置SPI通信为高位MSB在前。配置完这些SPI_InitStructure的结构体成员后,只需要SPI_Init()函数就可以把这些参数写入寄存器中。
5 实验与结果
通过在室内实验场地每隔2 m画一个测试点,测试距离范围为0~40 m,UWB定位节点安装在移动机器人上,测量到的数据通过板子里面的无线模块发送到电脑,电脑采集定位数据并同时显示在上位机界面,测试数据如表2所列。上位机界面通过C#软件开发。
提取到距离数据后,就可以通过相应算法实现定位点坐标测量,测试数据如表3所列,可以保证±5 cm的定位精度。

表2 测距测试数据
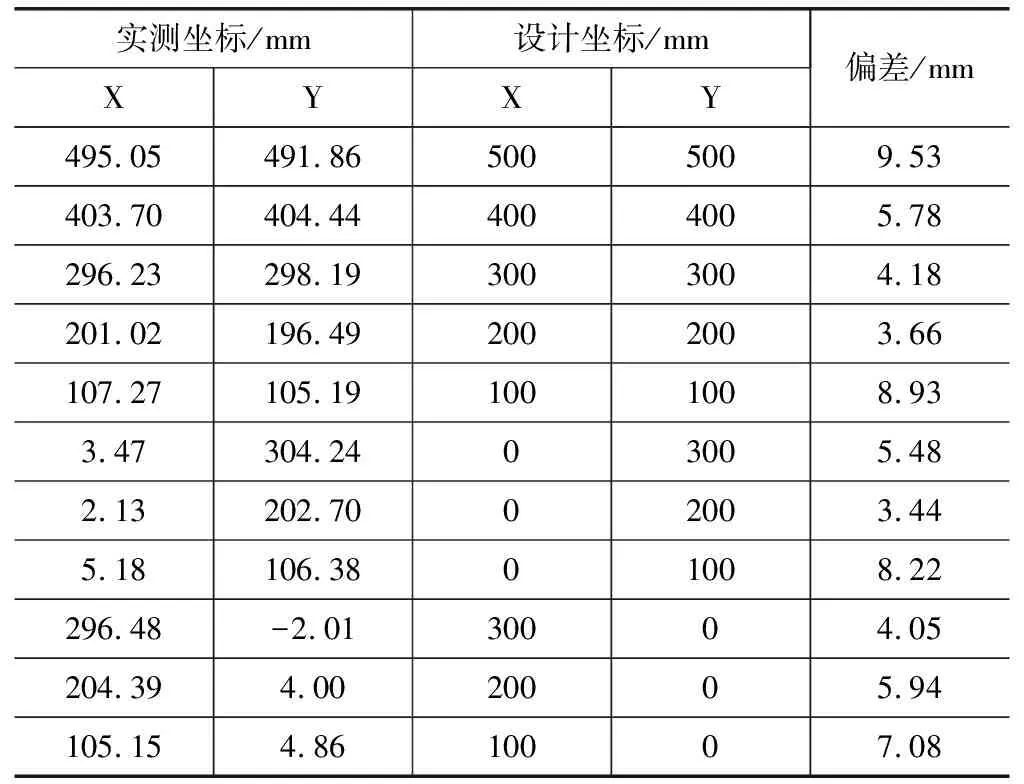
表3 定位测试数据
坐标测试效果图如图4所示,○为设计坐标点,*为系统定位结果。
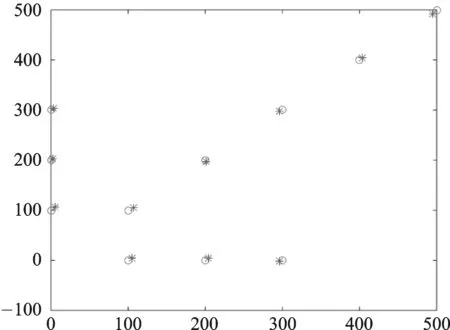
图4 UWB定位点测试效果图
结 语
激光SLAM定位、视觉SLAM定位的计算复杂、传感器成本过高、实时性差,本文针对这些缺陷,提出了通过UWB定位技术来实现室内移动机器人的定位,构建了实际的软硬件平台,完成了相关的实验,验证了UWB定位技术在室内移动机器人方面的可行性。实验结果表明,本系统具有高稳定性、高精度,可以很好地满足室内移动机器人的定位要求。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
科学与财富(2018年30期)2018-12-28
制造技术与机床(2017年3期)2017-06-23
计算机应用(2016年9期)2016-11-01
体育科技(2016年2期)2016-02-28
赤峰学院学报·自然科学版(2014年1期)2014-03-23
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28