
CTCS-3级车载系统硬件接口设计
2018-12-15 03:01邹未栋
铁路通信信号工程技术 2018年11期
邹未栋
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
1 概述
CTCS-3列控车载系统包括车载主机单元、车载接口单元、速度传感器、雷达、继电器接口模块、应答器接收模块(BTM&CAU)、人机交互单元(DMI)、轨道电路读取单元(TCR)、无线天线单元(MT)。组成示意如图1所示。
其中,车载接口单元包括U型底板、电源引入接口板、继电器I板、继电器II板、速传接口板、MVB&Profibus通信接口板、BTM&MT通信接口板、Radar&TCR通信接口板。车载系统的接口都是在上述接口板上实现。
2 车载系统输入输出接口
2.1 系统输入接口
车载系统采集车辆的输入信号如下。
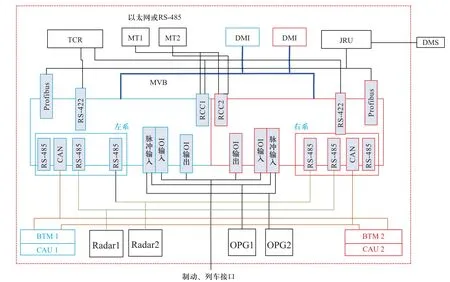
图1 车载系统组成示意图Fig.1 Schematic diagram of onboard system composition
SLA: 休眠输入1;
SLB: 休眠输入 2 ;
CABA: 前端驾驶室激活;
CABB: 后端驾驶室激活;
DIRF: 方向手柄前向;
DIRR: 方向手柄后向;
SBFB: 常用制动反馈 ;
EBFB: 紧急制动反馈;
TCOFB: 切牵引反馈;
EB1ACK: EB1A继电器反馈;
EB2ACK: EB2A继电器反馈;
EB1BCK: EB1B继电器反馈;
EB2BCK: EB2B继电器反馈;
LKJConfirm:零速反馈。
2.2 系统输出接口
车载系统驱动车辆的输出信号如下。
EB1A: EB1A输出;
EB1B: EB1B输出;
EB2A:EB2A输出;
EB2B:EB2B输出;
SB1: 一级常用制动输出;
SB4: 四级常用制动输出;
SB7: 七级常用制动输出;
TCO: 切牵引输出;
MSB: 断主断输出;
GFX3D: 磁钢过分相禁止输出;
Leftgate_enable:开左门允许;
Rightgate_enable:开右门允许;
ATO_enable:ATO允许。
3 车载系统输入输出接口设计
针对系统上述所有输入输出量,根据安全与非安全功能进行内部设计。
3.1 紧急制动输出接口设计
紧急制动输出接口设计如图2所示。
隔离开关断开,输出板无输出时继电器常开,继电器节点断开,继电器节点失电,输出紧急制动。输出板输出24 V控制继电器闭合,继电器节点得电,无紧急制动输出。

图2 紧急制动接口设计图Fig.2 Emergency brake interface design diagram
隔离开关闭合时,对继电器进行隔离,无紧急制动输出。
3.2 全常用制动输出接口设计
全常用制动接口设计如图3所示。

图3 全常用制动接口设计图Fig.3 Common brake interface design diagram
隔离开关断开,输出板无输出时继电器常开,继电器节点断开、失电,输出全常用制动。输出板输出24 V,控制继电器闭合,继电器节点得电,无全常用制动输出。
隔离开关闭合时,对继电器进行隔离,无全常用制动输出。
3.3 切除牵引输出接口设计
切除牵引输出接口设计如图4所示。
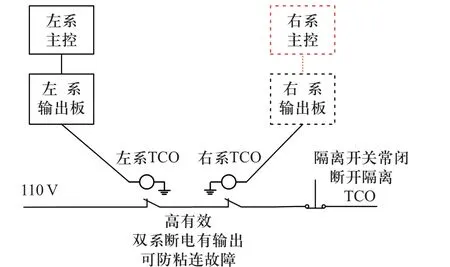
图4 切除牵引接口设计图Fig.4 Cutting traction interface design diagram
隔离开关闭合,双系输出板无输出,继电器常闭,双系继电器节点闭合、得电,输出切牵引。任意一系输出板输出24 V控制继电器断开,继电器节点失电,无切牵引输出。
隔离开关断开时,对继电器进行隔离,无切牵引输出。
3.4 断主断输出接口设计
断主断输出接口设计如图5所示。
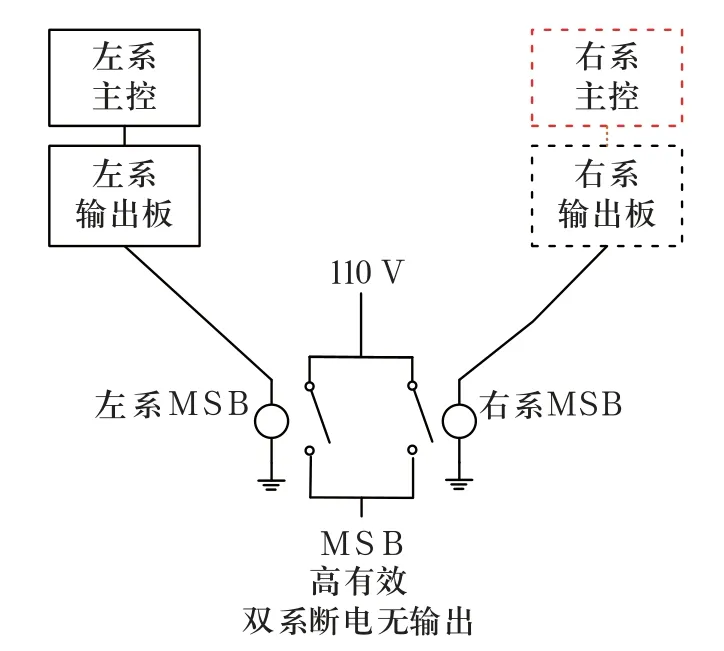
图5 断主断接口设计图Fig.5 Main circuit breaker interface design diagram
输出板无输出时继电器常开,继电器节点失电,无输出。输出板输出24 V控制继电器闭合,继电器节点得电,输出MSB。
SB1、SB4、GFX3D接口原理与MSB相同。
3.5 常用制动反馈输入接口设计
常用制动反馈接口设计如图6所示。
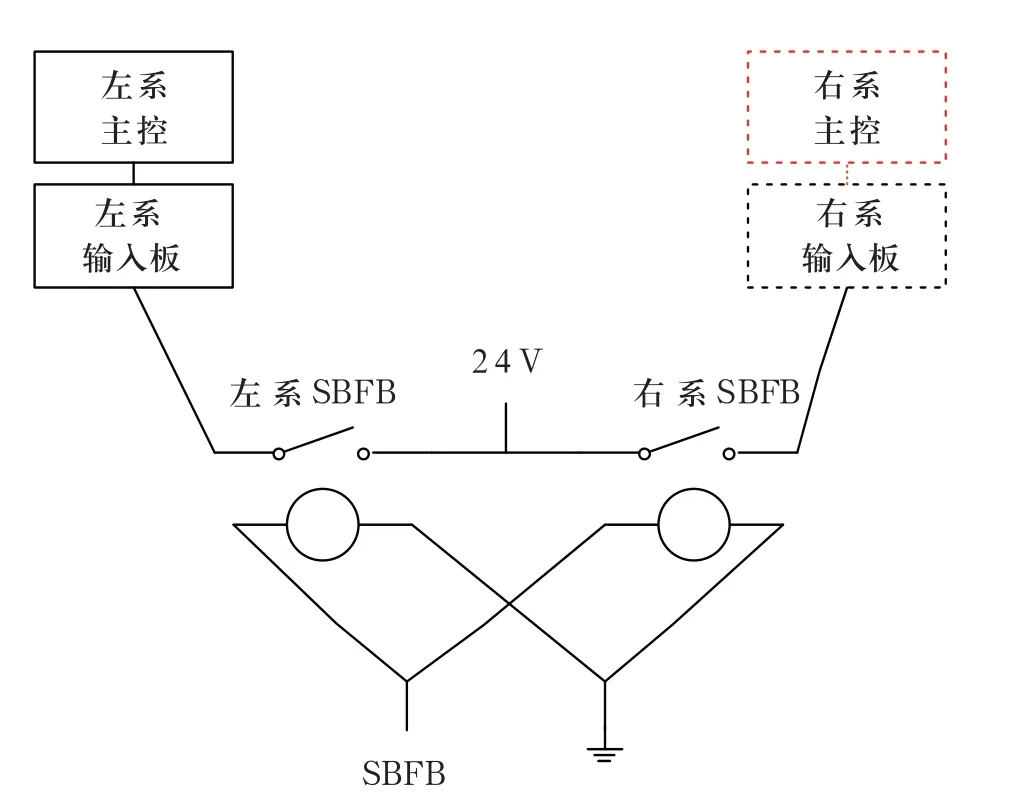
图6 常用制动反馈接口设计图Fig.6 Common brake feedback interface design diagram
继电器常开,SBFB输入110 V时,继电器节点闭合,输入板采集到24 V输入信号。SBFB无输入时,继电器断开,输入板采集到SBFB 0 V输入信号。
SLA、SLB、CABA、CABB、DIRF、DIRR、EBFB、TCOFB接口设计原理与SBFB相同。
3.6 紧急制动反馈输入接口设计
紧急制动反馈输入接口设计如图7所示。
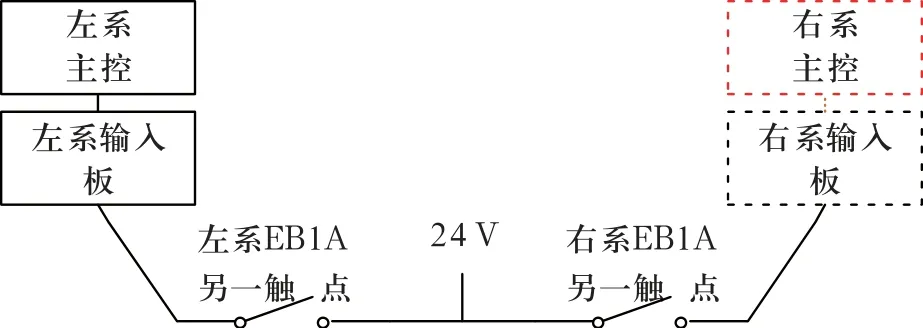
图7 紧急制动反馈输入接口设计图Fig.7 Emergency brake feedback input interface design diagram
继电器常开,当左系输出板输出EB1A信号为24 V时,继电器节点闭合,输入板采集到EB1ACK 24 V输入信号。左系输出板EB1A信号0 V时,继电器断开,输入板采集到EB1ACK 0 V输入信号。
EB1BCK,EB2ACK,EB2BCK接口设计原理与EB1ACK相同。
4 车载系统通信接口设计
车载主机与TCR、BTM、MT、雷达、速度传感器、DMI等通信接口设计。
4.1 主机与TCR通信接口设计
主机双系通信板,分别通过Radar&TCR通信接口板,与TCR的通信板通信,采用RS-422通信接口,需要在接口板上设计终端匹配电阻。
4.2 主机与BTM通信接口设计
主机双系通信板,分别通过BTM&MT通信接口板,与BMT的通信板通信,采用CAN通信接口,需要在接口板上设计终端匹配电阻。
4.3 主机与MT通信接口设计
主机双系RCC通信板,通过BTM&MT通信接口板,分别与2个MT通信,采用RS-422通信接口,需要在接口板上设计终端匹配电阻。
4.4 主机与雷达通信接口设计
主机双系通信板,分别通过Radar&TCR通信接口板,与2个雷达通信,采用RS-485通信接口。在接口板上进行滤波防护。
4.5 主机与速传接口设计
主机双系输入板,通过速传接口板,与2个速传相连,采用脉冲接口。速传接口板提供速度传感器电源,每个速度传感器需两路24 V隔离电源,隔离等级为3 000 V。每个速度传感器的3路输入信号需进行电气隔离,整块速传接口板共需提供6路隔离信号输入(两路预留),隔离等级为3 000 V。
4.6 主机与DMI通信接口设计
主机双系通信板,通过MVB&Profibus通信接口板与DMI通信,采用MVB接口,需要在接口板上设计终端匹配电阻。
5 结论
本文中设计的系统硬件接口,包括紧急制动接口、全常用制动接口、切除牵引接口、断主断路器等输出接口设计,常用制反馈接口,紧急制动反馈等输入接口设计,是在充分考虑接口的安全或者非安全情况下设计的。与TCR、BTM、MT、雷达、速度传感器、DMI等通信接口设计,也符合各个外设的通信接口定义。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
艺术学研究(2021年4期)2021-09-10
汽车电器(2020年4期)2020-04-23
铁道通信信号(2020年8期)2020-02-06
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
铁道通信信号(2019年11期)2019-05-21
小学生必读(低年级版)(2019年10期)2019-04-13
铁道通信信号(2018年11期)2019-01-19
中国公共安全(2017年11期)2017-02-06
