一种爬绳爬杆机器人的设计和制作
2018-12-15 07:05赵鹏吴濛涛顾佳祥陈跃
电子设计工程 2018年23期
赵鹏,吴濛涛,顾佳祥,陈跃
(徐州工程学院机电学院,江苏徐州221111)
随着桥梁、管线、输电线越来越多以及相应的安全要求越来越严格,相应的安全检测也越来越多,桥梁悬索检测、输电线路检测往往在高空进行,充满危险因素,管线检测往往要在人们无法进入的地方进行,因此设计一种能够在悬索、输电线或管路上运动实现无人巡检的机器人显得非常重要。
国内外很多学者针对各种特定的行业,展开了大量的研究。有对船体清洗开发的机器人[1-3]。德国KAMAT公司[4]开发了一种高空除锈机器人。张申林的桥梁拉索检测机器人[5]。华南理工大学研制的Climbot加持类机器人[6]。宁波大学的陈伟设计研制了船体抛光小型机器人弯曲曲面行走系统[7]对于爬壁机器人[8]有较良好的改善,并开展了故障诊断技术研究[9]。
本文设计了一种爬绳爬杆机器人,阐述了其机械构型与工作原理以及运动控制方法。
1 爬绳爬杆机器人结构设计
1.1 机器人总体方案设计
一般来说爬杆机器人正常工作需满足移动功能和贴附功能。移动功能有4种:蠕动式[10]、履带式[11]、轮式以及腿式。贴附功能有两种实现方式:夹持式和吸附式[12]。传统吸附方式有负压吸附、推力与加持力吸附及磁力吸附等[13-14]。并且正常工作需要依据抓持杆件的方式,爬杆机器人大体可分环抱式、钩爪式和夹持式3类[15]。
本文设计的机器人机械机构主要包括以下几个部分:驱动机构、减速器、压紧机构、爬升机构。驱动机构主要是由电机和联轴器组成;减速器由涡轮蜗杆减速机构组成,通过对机器人爬行时所需要的最大扭矩的估算进行减速器的选择和尺寸设计。压紧机构主要是由弹簧、轮架、车轮等组成,这部分主要根据对轮轴所能承受的强度来进行轴径的计算。爬升机构是由驱动轮、传动轴、轴承、套筒等零件组成。这些机构均安装于机器人壳体上,机器人壳体对内部的机械机构和控制装置起到保护作用,同时也作为安装摄像头等附加设备的本体[16]。机器人的爬升机构的箱体内安装有双电动机和蜗轮蜗杆,电机通过蜗轮蜗杆传递的速度和扭矩带动传动轴上驱动轮的转动。稳定轮通过拉簧的拉紧来使稳定轮和驱动轮紧紧的压在绳索上,稳定轮和驱动轮分别位于绳索的下方和上方,保持机器人的平稳运行。机器人整体结构如图1所示;机器人传动部分结构如图2所示。
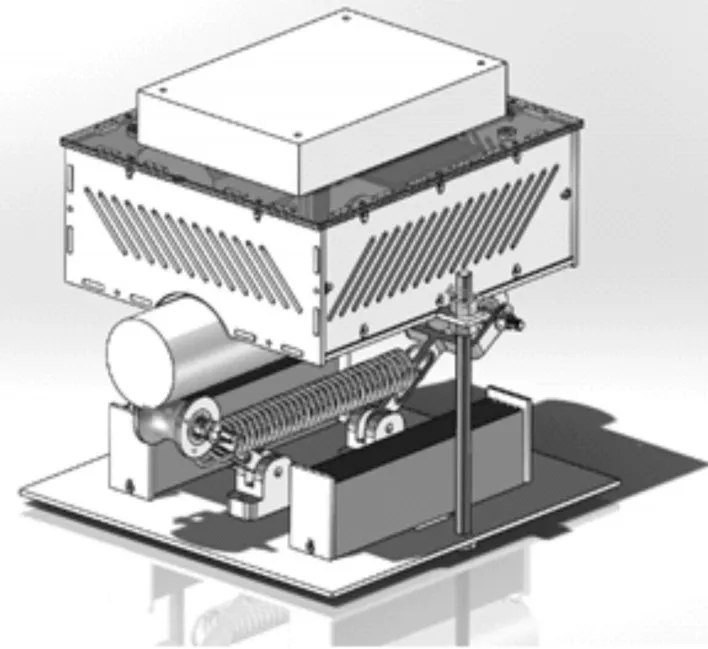
图1 机器人整体结构图

图2 机器人传动部分结构图
1.2 压紧机构的设计
压紧机构的主要作用是通过调节弹簧的预紧力来使机器人滚轮能够对绳或杆产生一定的压力从而产生足够的摩擦力,保证机器人能够在绳或杆上稳定爬行;同时还可以使机器人能够在不同直径的绳或杆上工作。机器人的压紧机构主要由弹簧、滚轮、滚轮叉架、固定座以及一系列标准件组成,如图3所示,机器人压紧机构图。

图3 机器人压紧机构
2 爬绳爬杆机器人控制部分设计
2.1 机器人的控制方法
机器人可以通过遥控器进行控制,机器人的运动状态分为启动/停止、加速/减速、前进/后退遥控器能发出4条指令,分别为A(启停按键),B(正反转按键),C(加速按键),D(减速按键)。
本文设计的爬绳爬杆机器人采用ST89C52单片机作为整个电路控制系统的核心,单片机通过驱动器控制步进电动机运动,改变单片机输出控制信号频率进而实现对电动机的调速,改变给电机接口的电流顺序,则可实现对转向的控制。
2.2 机器人的控制流程图

图4 控制系统框图
2.3 单片机选型
单片机作为系统的控制核心,其稳定性直接决定着整个系统的稳定性。对于工作环境极其恶劣且复杂的引信电路来讲,其对单片机的稳定性和可靠性均有着极高的要求。因此,选择合适的单片机就是十分重要的工作。
51单片机能够成为经典是有原因的。首先,它具有一整套完善的按位操作系统,配合双重功能的地址区间和乘法、除法指令,也为开发者带来了极大的便利。但其缺点也是极其明显的,作为单片机中的“老爷机”,其外设资源极其有限,常用的AD、EEPROM等功能均需要外接外设进行扩展,增加了软硬件负担。同时,IO口驱动能力很差,这也是51系列单片机最大的软肋,这一点直接限制了其在工业控制和军工等领域的应用。同时由于其老旧的硬件架构导致其运行速度过慢,代码效率极低。同时,51单片机的硬件保护能力非常差,稳定性和可靠性都不高,很容易烧毁芯片。但是低廉的成本和丰富的开发资料,使得51单片机仍然是国内占市场比例最高的低级单片机。
PIC系列单片机是美国微芯半导体主打的微控制器产品。由于内置CMOS互补推挽输出的IO口具有很强的外设驱动能力,是很多工业控制类项目的首选。同时,极强的抗干扰性也是PIC系列单片机的一大优点,得益于其简洁高效的硬件结构,PIC单片机的可靠性和稳定性均非常出色。但同样由于其硬件结构过于简化,导致其没有乘法指令等很多常用指令,这为开发工作带来了一定的难度。
综合需求考虑,本项目选用宏晶半导体推出的STC89C52单片机作为项目主控。
2.4 遥控部分说明
遥控与接收部分采用2262/2272四路无线遥控模块。
遥控器上有四个按键,分别对应接收板上的4个数据输出位输出引脚D0、D1、D2、D3。按按键发射信号,对应的输出位就会输出高电平。
接收装置即带有2272解码芯片的接收板,其工作电压为5 V,接收灵敏度为-98 db。有7个引脚位,分别是 VT、D3、D2、D1、D0、+5V、GND。其中 VT是有效信号高电平输出脚,一旦收到有效信号,该引脚输出高电平,也可以驱动继电器。
2272接收解码器的D0-D4引脚与单片机的P1.4-P1.7引脚相连,单片机检测每个引脚的电瓶,一旦某个引脚电平变成高电平,则按照预设的功能要求给出指令,控制机器人运动。
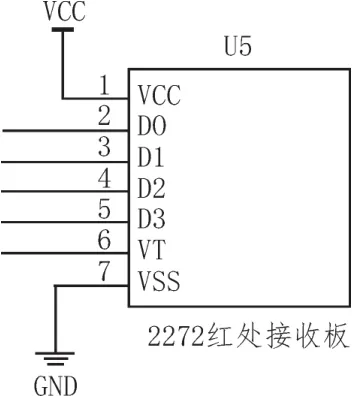
图5 2272红外线接收板
2.5 电动机的选择
考虑到该机器人运行精度要求不高,需要较大的扭矩以及实时速度的调整,而且步进电机控制比较方便,本文选用步进电动机驱动机器人运动,经过计算,两相57步进电机即可满足要求。电动机是机器人的唯一动力源,其外部尺寸也将影响到其他机构的安置,选用的此电机的外部尺寸也是考虑因素之一。
查表知,可选用的型号为57HB41K-104,轴径选用8 mm的规格的。该步进电机的矩频特性曲线如图6所示。由图知该步进电机转速在300 r/min,以下时,转矩可近似看成不变。
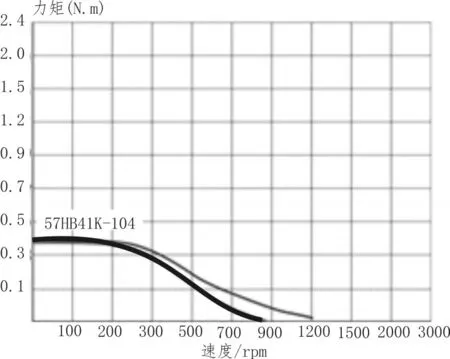
图6 两相57步进电机的矩频特性(粗线24 V驱动电压,细线36 V驱动电压)
2.6 电机驱动的选择
电机驱动模块是影响项目稳定性的一个重要因素。本项目使用两个步进电机作为系统的动力部分。步进电机的驱动可以选用专用的电机驱动模块,L298N,UN2803等,这类驱动模块接口简单,操作方便,它们既可以驱动步进电机,也可以驱动直流电机。从功能实现上来讲,这两种芯片无疑也可以完成对步进电机的控制,但是由于本次设计所选择的电机驱动电流大,使用上述两个驱动器时,当步进电机每运行一步时,其绕组内的电流变化巨大,容易引起电机的噪声和振动。我此次设计选用的步进电机配带有YK2M406的驱动器,这种驱动器可以实现在电机正常工作的情况下对电机绕组内电流的细分,从而降低噪声和振动。
2.7 控制电路连接总图及说明

图7 控制电路图
如图7所示,本设计中将2272接受模块的供电引脚和地脚接好后,再对其输出引脚进行接线将D0至D3分别接到单片机的P2.4至P2.7,VT引脚接到单片机的P2.3引脚,至此单片机与接收模块连接完成。将遥控器上的4个按键A、B、C、D分别用作电机的启停按键、正反转按键、加速按键、减速按键。当控制系统开始工作时,如果遥控器上的A(启停按键)按键被按下,则编码芯片发出带有地址、数据、同步码的编码信号,单片机检测VT引脚的电平发现为高电平,即说明数据发送成功。解码芯片收到信号后先对地址码进行校核,发现发出信号的是遥控器A按键,则2272模块的D0引脚产生高电平,对应的单片机引脚P2.4被拉高,此时单片机通过执行内部程序,使电机开始转动或是停止转动,即机器人前进和停止。
3 结 论
本文设计的爬绳爬杆机器人主要是由2组机械滚轮,每组一个稳定轮和一个驱动机械轮、电机、减速器、单片机控制系统组成。通过调节两个稳定轮上弹簧的预紧力来实现机械滚轮对绳索的抓紧,然后电动机通过减速机构把运动传递到驱动轮,由于摩擦力的作用,使机器人延绳爬行。该爬绳爬杆遥控机器人只需一个驱动源,就能使整个机器人运动,结构十分简单。通过更换滚轮可以攀爬不同直径的绳索,也可由于弹簧的缓冲作用攀爬连续变化的直径的绳索,可以广泛的用于各种高空作业。
由于该机器人可以进行高空作业,安装上视频采集和传输装置可以实现对悬索、管线等的检测,这可以使机器人代替人类进行高空作业,随着技术的发展和产品的成熟可以降低人力高空作业所产生的风险性和难度性。但是后期如何将其他器件负载在机器人上目前还没有具体的方案,机器人搭载其他器件所产生的额外重量对机器人产生的影响目前也不得而知。
猜你喜欢
杂技与魔术(2022年3期)2022-11-06
山西电子技术(2022年1期)2022-02-28
电子制作(2021年3期)2021-06-16
电力设备管理(2021年2期)2021-03-15
科技传播(2019年15期)2019-08-22
电子制作(2018年17期)2018-09-28
数字传媒研究(2017年11期)2017-02-05
西部广播电视(2016年16期)2016-11-09
电子制作(2016年1期)2016-11-07
长春工业大学学报(2013年2期)2013-08-16