
基于Matlab的数控测试平台中PMSM控制系统虚拟仿真实现
2018-12-24 02:24殷红梅盛定高
装备制造技术 2018年10期
吕 力 ,殷红梅 ,盛定高
(1.淮安信息职业技术学院,江苏 淮安223003;2.江苏省电子产品装备制造工程技术研究开发中心,江苏 淮安223003)
0 引言
针对目前数控加工的高精度、高效率的加工要求,开发开放性数控动态性能测试平台已成为验证和提高数控机床实际性能的必要工作。永磁同步电机(Permanent Magnet Synchronous Motor,简称 PMSM)是目前较受欢迎的驱动执行元件,本文采用PMSM作为数控平台的驱动元件,根据PMSM数学模型,在Matlab7.14的Simulink环境下,利用SimPowerSystem提供的模块库,提出建立PMSM矢量控制系统仿真模型的方法,为测试平台提供依据。
1 测试平台中PMSM的数学模型建立
在这里首先给出PMSM的矢量控制模块框图,见图1,坐标转换发生在永磁同步电机的输入端前,即要求永磁同步电机的数学模型是在d/q坐标系下。在MATLAB/SIMULINK环境下建立了永磁同步电动机的仿真模型,用到的电机参数为:定子相绕组电阻R=2.875.定子d相和q相绕组电感Ld=Lq=0.008 5 H,转动惯量J=0.000 8 kg·m2,转子磁链Φ=0.175 Wb,极对数P=4,F初始=0,额定转速ne=700 r/min[1].
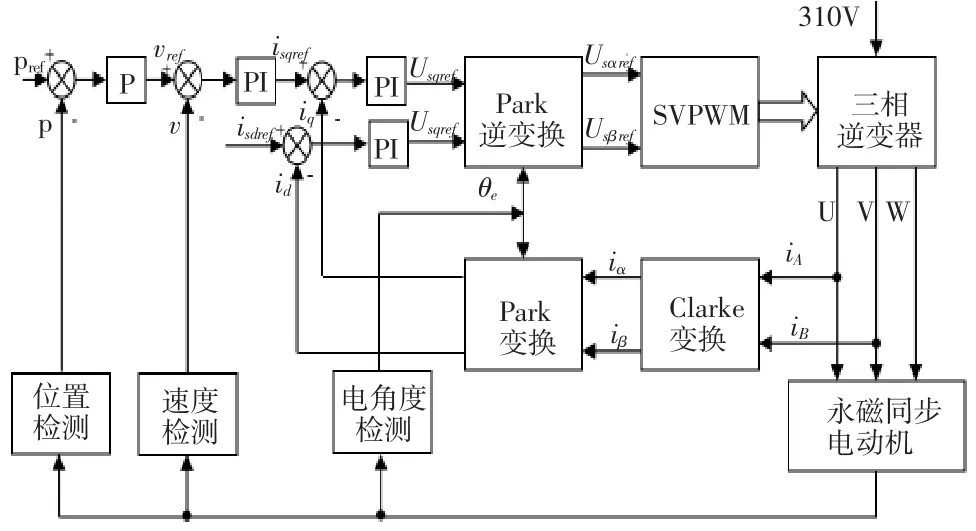
图1 PMSM的矢量控制模块框图
图 1 中,PI为调节器,iα、iβ、iA、iB、ia、id分别为电流向量,其中iA、iB为静止坐标系中A、B轴对应的电流向量,ia、iB为 iA、iB经过 Clarke 变换后的电流向量,ia、iq为 d、q 轴电枢电流,U、V、W 为三相电压,isqref为动子电流,Usdref为动子电压,pref为动子位置,vref为动子速度,P为被检测的位置参数,V为被检测的速度参数,θe为被检测的电角度参数。
1.1 三相平面静止坐标系下PMSM数学模型
根据永磁同步直线电动机的初级三相绕组定义一个三相平面静止坐标系,其中A、B、C三个轴代表电动机绕组的三相,三个轴之间的夹角为120°,现假设永磁同步直线电动机为理想电动机,并将三相绕组星型连接,根据电机学原理,可以得到其在三相平面静止坐标系下的数学模型。经过推导,PMSM三相绕组的磁链方程为:
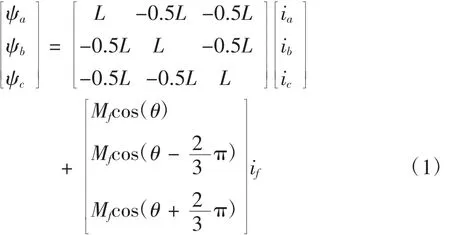
其中[ψaψbψc]T为磁链向量。[iaibic]为电流向量;if为永磁体的等效电流,L为自感系数,Mf为互感系数。
1.2 旋转坐标系下PMSM数学模型
为便于控制与计算PMSM的初级电流等空间同步转速旋转矢量,需将三相平面静止坐标系变换成旋转的旋转坐标系,实现电动机的各个空间矢量均成为静止矢量,即直流量,从而实现矢量控制[2-3]。设理想情况下直线电动机的三相绕组完全对称,气隙磁场正弦分布,采用id=0的矢量控制策略,经过坐标系之间的Clarke变换、逆变换与Park变换,逆变换可以得到永磁同步直线电动机在d-q旋转坐标系上的电压方程及磁链方程:

其中,v为直线电动机的直线运动速度;p为微分算子;ψf为次级永磁体励磁磁链;R为电阻;ud、uq为 d、q 轴电枢电压;id、iq为 d、q 轴电枢电流;Ld、Lq为d、q轴电枢电感;对于表面贴装式永磁同步直线电动机,Ld=Lq;ψd、ψq为 d、q 轴磁链。
2 基于Matlab的数控测试平台PMSM系统模型的建立
在Matlab7.0的Simulink环境下,利用SimPowerSystemToolbox提供的丰富模块库,在分析PMSM数学模型的基础上,提出了建立PMSM控制系统仿真模型的方法[4]。
2.1 PMSM和逆变器模块
选取Matlab/Simulink的电力系统仿真模块库SimPowerSystems中的定子绕组星形连接三相永磁同步电机模块作为PMSM本体仿真模块,它可与检测单元连接。选取通用的三相桥式变换器(Universal Bridge)为逆变器模块,设置其为IGBT模式,电机是由逆变器驱动的。
2.2 坐标变换和PI调节器模块
(1)坐标变换模块
在实现永磁同步电机矢量控制的过程中,需要进行坐标变换,即三相静止坐标系ABC向两相同步旋转坐标系-转换,在坐标变换仿真中用到的坐标变换模块包括:Clarke变换和Park变换,Clarke变换仿真模型如图2所示。
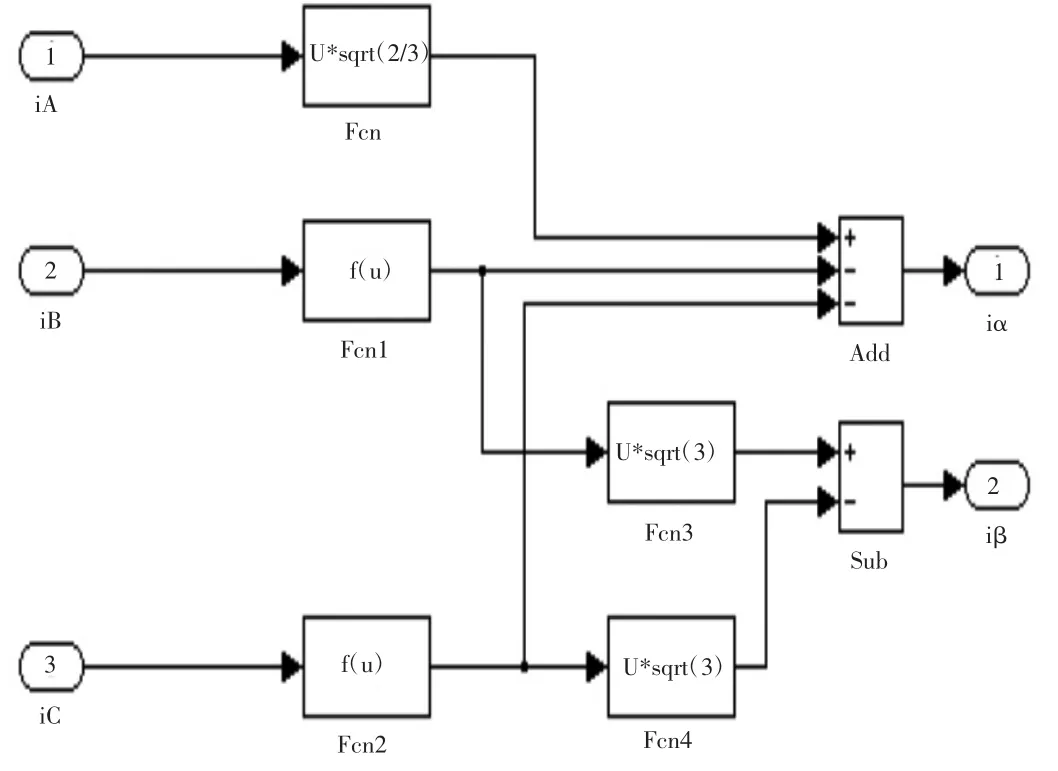
图2 Clarke变换模块
(2)PI调节器模块
在本系统速度环和电流环均采用带饱和限幅的PI调节器,利用Matlab/Simulink可以很方便的建立PI调节器仿真模块。速度环和电流环的系数可根据PI调试的规律逐步调试得到,PI调节器的仿真模块如图3所示。

图3 PI调节器仿真模块
2.3 SVPWM仿真模型建立
建立空间矢量脉宽调制仿真模型要经历4个步骤:首先判断合成电压矢量所处的扇形区域、计算基本矢量的作用时间、建立电压基本矢量作用时间仿真模块;然后计算开关切换时间;将开关作用时间Tcm1,Tcm2,和Tcm3值与三角波进行比较,最终生成对称空间矢量 PWM 波形 PWM1、PWM3和 PWM5[5-6],如图4所示。
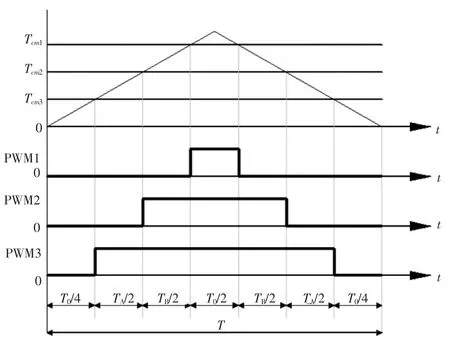
图4 PWM波形生成
在一个采样周期内,当三角波形点大于切换时间时,PWM波形进行一次翻转,而当波形下降到小于切换时间点时,PWM波形再进行一次翻转,这样反复,就可以输出所要的SVPWM波形了。PWM2、PWM4、PWM6可通过将 PWM1、PWM3和 PWM5进行非运算获得,最后还需将它们由bool型转换成double。在完成以上4个步骤仿真模块的建立以后,将它们逐个封装,形成一个完整的SVPWM模块,如图5所示。
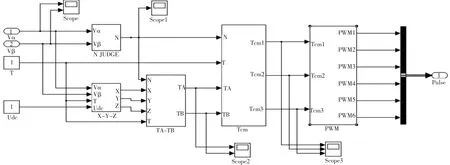
图5 SVPWM完整模块
2.4 控制系统仿真模型建立
建立PMSM模块、逆变器模块、坐标变换模块、PI调节器模块和SVPWM仿真模块之后,便可以建立基于Matlab/Simulink的永磁同步电机转子磁链定向控制系统仿真模型[7],如图6所示,电机模块的m端输出可供测量的向量,其中包括定子相电流、转子转速、转子位置角和电磁转矩等,TL为负载转矩,ω为设定的电机转速[8]。
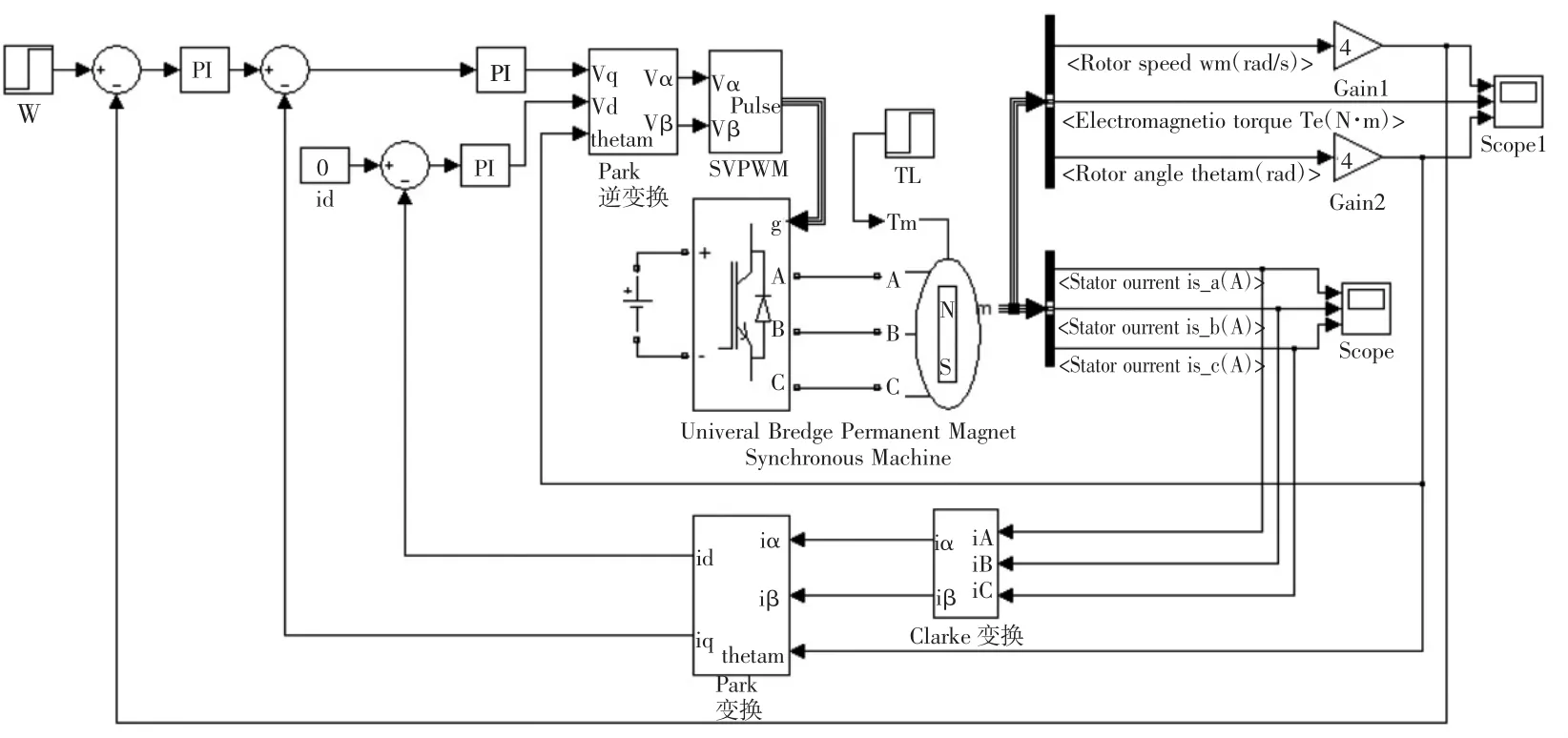
图6 交流伺服控制系统仿真模型
3 虚拟仿真试验结果综合分析
本文所研究的机电系统为三维数控实验台,交流伺服控制系统由松下MSMD022G1U型永磁同步电机和MADHT1507型交流伺服驱动器组成[9],通过Simulink建立伺服系统仿真模型以及对虚拟仿真系统进行试验分析,并将试验结果与数控平台实际的运行状态进行比较,验证所构建的仿真模型和选用的仿真方法是正确的,实现对三维数控系统性能的虚拟测试。如图7所示。
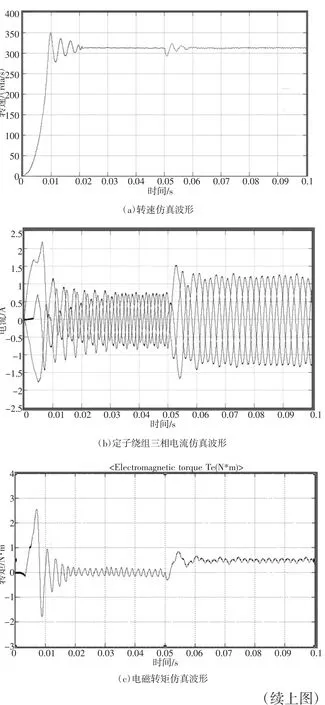
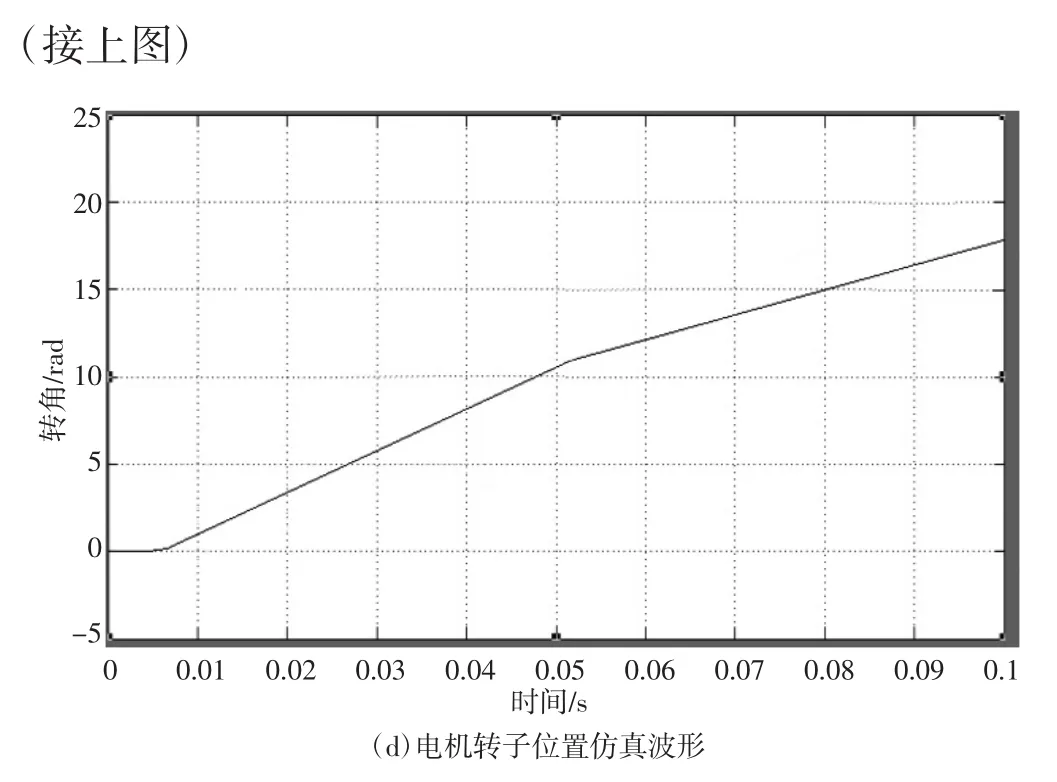
图7 电机带负载0.5N·m、转速为314rad/s的仿真结果
从图7所示的电机转速、定子三相电流、转子位置、电磁转矩和机械平台仿真波形可以看出定子转速、三相电流和转矩在电机转动开始时波动较大,但很快就稳定在设定值,使伺服控制系统很快地进入平稳运行状态,说明所构建的仿真模型和使用的仿真方法是切实可行的。
4 结束语
本文针对三维数控平台系统的上位控制单元采用“PC+运动控制器”的控制方式,利用Matlab/Simulink模块库建立交流伺服电机及其伺服控制系统的仿真模型,通过该模型验证了数学模型的有效性及控制系统的合理性,加快了实际系统设计和调试的进程,为开放性数控动态性能测试平台的建立提供了可行的依据。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
宇航计测技术(2018年3期)2018-09-08
汽车与新动力(2015年1期)2015-02-27
汽车电器(2014年8期)2014-02-28
