
等距圆锥螺旋线数理性质的初探
2018-12-24 03:39涂德新姜付锦
物理通报 2018年12期
涂德新 姜付锦
(江西师范大学附属中学 江西 南昌 330046)(武汉市黄陂区第一中学 湖北 武汉 430300)
如果质点沿阿基米德螺线(等速螺线)运动的同时沿垂直于该平面的方向匀速运动, 于是质点的合运动所形成的轨迹就是等距圆锥螺旋线(以下简称螺旋线).下面首先用物理方法研究螺旋线的曲率半径, 接着研究质点在重力的作用下沿光滑螺旋线运动时受到的作用力,并在直角坐标系和自然坐标系中求解,得到了相同的结果.
1 螺旋线的曲率半径
1.1 建立螺旋线的参数方程
如图1所示,建立直角坐标系O-xyz, 圆锥的半顶角为α, 螺距为2πl, 一个质量为m的小球从坐标原点由静止开始沿光滑的螺旋线运动. 重力加速度为g.

图1 直角坐标系下的圆锥螺旋线
以极角φ为参数可以建立螺旋线的参数方程
x=kφcosφy=kφsinφz=kφcotα
考虑到一个螺距为2πl, 于是
2πlsinα=k2π
可得
k=lsinα
则
x=lsinα·φcosφ
y=lsinα·φsinφ
z=lcosα·φ
1.2 物理方法求曲率半径



可以求得
曲率半径ρ与向心加速度an间存在关系
(1)
分析有
其中

可以求得
将相关参量代入式(1)可得
1.3 数值模拟
数值模拟如图2、图3所示.

图2 小球三维空间中的运动轨迹

图3 曲率半径与极角关系
2 小球受到螺旋线的作用力
2.1 直角坐标系中求解
小球沿光滑的轨道运动, 其机械能守恒
即
可以求得
(2)
再求二阶导数可得
(3)
在这种情况下



对小球写3个方向的牛顿第二定律
小球受到的作用力为
代入可得
(4)
将式(2)、式(3)代入式(4)并化简求解得
(5)
其中
A=19sin2α+2sin22α-3sin23α
B=63sin2α+34sin22α-15sin23α
C=48sin2α+72sin22α
D=16sin2α
2.2 自然坐标系中求解
空间曲线上的某点存在3个向量:切向向量﹑主法向向量和次法向向量.切向向量指向弧坐标的正向, 主法向向量指向曲率中心, 切向向量和主法向向量构成密切平面(曲率平面), 次法向向量与这个平面垂直, 切向向量与次法向向量决定的平面为从切面(直切面).动点的速度和切向加速度均与切向向量平行, 动点的法向加速度沿主法向向量的方向,这3个向量构成的右手坐标系即自然坐标系. 下面求解螺旋线上某点的切向向量A﹑次法向向量B和主法向向量C.
以极角φ为参变量,依照前面的分析有

(sin φ+φcos φ)j+cot α·k



展开得
B=-(2cosφ-φsinφ)cotα·i+
(-2sinφ-φcosφ)cotα·j+(2+φ2)k
C=B×A=
展开得
C=Cxi+Cyj+Czk
其中
Cx=-(2sinφ+φcosφ)cot2α-
(2+φ2)(sinφ+φcosφ)
Cy=(2+φ2)(cosφ-φsinφ)+
(2cosφ-φsinφ)cot2α
Cz=-φcotα
可以对小球写切线方向的牛顿第二定律, 从法线方向的平衡方程和主法线方向的牛顿第二定律
mgk·A0=maA
mgk·B0=NB
mgk·C0+NC=maC
其中A0,B0,C0分别为切线方向﹑从法线方向和主法线方向的单位向量.
aC为法向加速度
代入可得
可以求得
以及
NC=NC1+NC2
其中

NC2=mgcotα·φ·[(1+φ2)(2+φ2)2+
小球受到的作用力
代入可以求得N2的表达式同式(5)一致.
2.3 数值模拟
2.3.1小球受到的作用力与极角的图像
如图4所示, 两种坐标系中分析结果的图像完全重合. 可以发现作用力不断增加, 存在极限值, 分析式(5)可以求得
其中
A=19sin2α+2sin22α-3sin23α
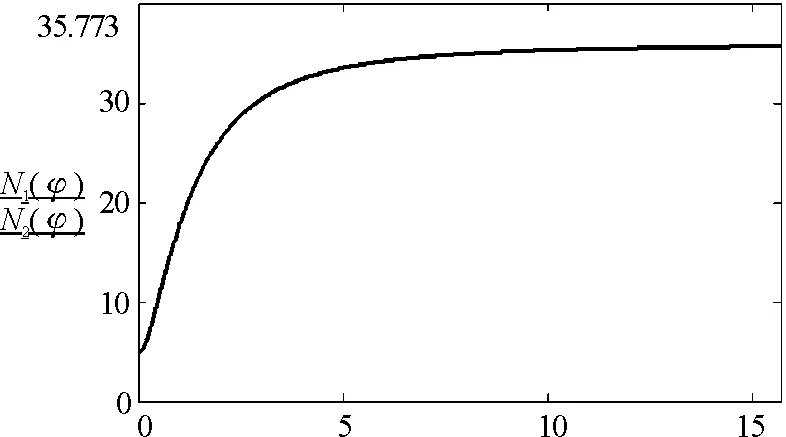
图4 作用力与极角的关系
2.3.2 小球受到的作用力与时间的图像
可以写成
这个积分涉及到椭圆积分和复变函数,所以时间与极角的关系很难写成显性解析式,定积分结果中含有椭圆积分和复变函数

小球运动的时间t与极角φ的关系数值模拟如图5所示.

图5 时间与极角的关系图
考虑到时间t﹑极角φ和作用力N是一一对应的, 可以数值模拟出作用力与时间的图像如图6所示.

图6 作用力与时间的关系图
3 结语
本文用物理方法求螺旋线的曲率半径, 过程简洁, 思路清晰. 用两种办法求螺旋线对小球的作用力, 直角坐标系中求解过程简单明了.自然坐标系中虽然比较复杂, 却很有意义:小球沿空间曲线运动时, 其速度和切向加速度均与切向向量平行, 法向加速度沿主法向向量的方向, 在从法向向量的方向是平衡的.并且所有的量均可以表示成极角的函数,结果发现两种方法的计算结果一致.本文还对曲率半径和小球受到的作用力进行了数值模拟,这对我们的教学研究有一定的借鉴.
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18
电子技术与软件工程(2020年6期)2020-02-03
数学物理学报(2019年5期)2019-11-29
振动与冲击(2018年14期)2018-08-02
中学生数理化·高三版(2016年2期)2016-09-10
中学生数理化·高二版(2016年6期)2016-05-14
科学中国人(2016年35期)2016-01-28
