弯沉传感器的选型研究
2018-12-26 12:58王海春
智能城市 2018年23期
王海春 胡 超
苏交科集团股份有限公司,江苏南京 210000
路面弯沉值是评价路面承载能力的重要指标,不仅用来评价道路的使用现状,同时也可以对新建和改建道路提供设计依据,随着机械、电子、计算机和激光高科技技术的发展,弯沉检测技术也在不断发展和进步。弯沉传感器的选型也变得越来越重要。
1 路面弯沉检测技术的发展
路面弯沉检测技术根据其对路面的加载方式的不同可分为3个阶段:静态加载弯沉检测,稳态动力加载弯沉检测和脉冲动力加载弯沉检测。
贝克曼梁检测系统主要由额定轴载的标准车、标准长度的贝克曼梁、机械百分表、百分表表架和用于测量地面温度的温度计等,一定载荷作用于路面当轮胎驶离静止点后通过杠杆原理及百分表测量出路面的回弹弯沉。在此基础上发展起来的自动弯沉仪是基于贝克曼梁的测量原来发展起来的静态加载弯沉仪,相对原具贝克曼梁弯沉检测系统具备自动量测弯沉的功能。
静态加载弯沉仪是通过动荷产生装置对路面施加间隙性的周期荷载,通过分布在路表面的一组或几组弯沉传感器采集中心弯沉盆数据。
脉冲动力加载弯沉仪其代表产品是落锤式弯沉仪(FWD),系统在进行测量路面弯沉时通过微机控制下的液压系统提升重锤到一定高度后,让重锺自由落体撞向地面,对路面施加脉冲荷载(该动荷载一般约为50kN)。通过与路面接触的的弯沉梁上的弯沉传感器测定,就能获取被测路面弯沉盆的形状。
目前还处于研制阶段的激光式弯沉仪,又称为滚轮式弯沉仪(Rolling Wheel Deflectometer),属于不停车行驶状态下的采样动态弯沉检测类仪器,其最大优点是检测速度快、效率高。其主要利用车辆后轮自身的载荷(配有荷载块),导致受力于后轮的地面发生地面形变量(弯沉值),利用激光多普勒技术测量地面在荷载作用下的垂直距离,再通过采集分析软件计算出对应的弯沉及弯沉盆数据。
无论是自动弯沉仪、稳态动力弯沉仪还是目前广泛使用的落锤式弯沉仪以及正在研究的滚轮式弯沉仪,其关键核心部件都依赖于测量地面弯沉的弯沉传感器。
2 弯沉传感器理论分析
弯沉传感器测量地面的弯沉值其实质上就是测量地面在荷载作用下发生的形变量——位移,通常为了得到位移值可通过位移传感器直接测得位移量,或者通过速度传感器经一次积分后得到位移量,或者通过加速度传感器经过二次积分后得到位移量。现将FWD所选用的弯沉传感器总结如表1所示。

表1 各FWD厂商所选弯沉传感器类型
由于落锤式弯沉仪在工作过程中不存在绝对的参考静止点,因此,弯沉传感器在测量大地运动时,需采用绝对式测振传感器(惯性式测振传感器)。惯性式测振传感器种类很多,用途很广,虽然各类惯性式测振传感器原理结构不尽相同,但是它们都有一个共同点,即传感器底座都固定在被测物体上,传感器内部都有一个质量块(质量为m),质量块都通过弹簧或其他弹性体(弹性系数为k)与传感器底座相连,振动体的绝对运动通过弹簧带动质量块与底座之间产生相对运动,其相对运动受到传感器内阻尼起(阻尼系数为c)的阻尼作用,这样就构成一个“运动系统,其工作原理如图1所示。

图1 惯性式测振传感器工作原理图
xi(t)为振动物体的绝对位移,x(t)为质量块m的绝对位移,则质量块与振动物体之间的相对位移xt(t)为:

由牛顿第二定律可得质量块的运动方程为:

当物体做简谐振动时:

其频率响应函数为:

其振幅比为:

其相位为:


图2 磁电式传感器的幅频特性
2.1 惯性式测振位移传感器
通过上面的分析可知,当ω>ω0时,则振幅比就接近于1,即当振动物体的频率比传感器的固有频率高很多时,质量块与振动物体之间的相对位移就接近等于振动物体的绝对位移因此,在这种情况下,传感器的质量可以看作是静止的,即相当于一个静止的基准。因此,仅需通过测量质量块与振动物体之间的相对位移就可得到振动物体的位移,为了测量可用电容式位移传感器、电涡流式的位移传感器、线性电压差动变压器(LVDT)等微小位移传感器进行测量。LVDT一般作为测量质量块和振动物体间的位移元件,其工作原理如图3所示。

图3 LVDT结构原理图
当用AC作用激励线圈P时,2个次级线圈S1和S2由于感应产生了感生电压,中间的移动磁性线圈起到中间磁介质的作用,因为在二级线圈中产生的感应电压,大小相等,极性相反,因此使得输出电压为零,移动磁性线圈没有位移变化时,其输出为零,并且该值非常稳定,并且可重复性强。但当可移动的磁介质在平衡位置发生位移变化时,此时电磁不平衡产生了差动的AC输出电压,该输出电压和磁介质的位移值成线性比例关系。
LVDT基于变压器的原理如图4所示,其灵敏度与线圈有关。
其测量范围可达±25~±600nm,由于其机械固有频率一般为几百Hz,因此不宜用于高频动态测量。当LVDT元件作为系统中的一个部件使用时,LVDT的外壳相当于系统质量块,即参考基准;LVDT中的磁性线圈通过测杆和被测振动体简谐振动,当振动频率远高于传感器的固有频率时,LVDT的输出电压和振动物体的位移成正比。系统可制作成惯性式测振位移传感器,用该原理设计出来的位移传感器体积大,安装不方便,整个传感器系统的阻尼系数易受外界影响,测量弯沉数据的不准确。
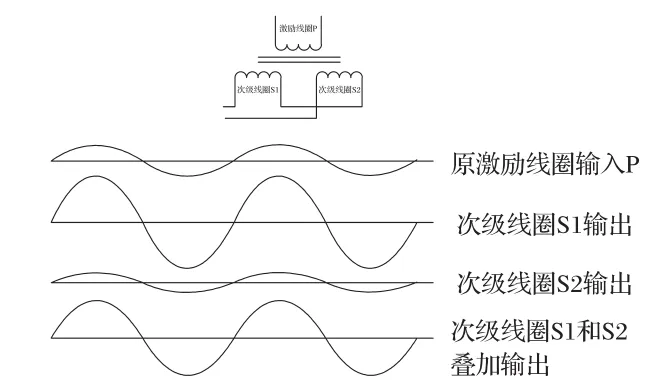
图4 LVDT输出波形图
2.2 磁电式地震检波器
由位移传感器配接系统构成的惯性式测振传感器可用于测量振动频率高于固有频率的振动位移,但是由于其结构复杂,安装不方便,因此,不适合作为落锤式弯沉仪的弯沉传感器,根据速度和位移之间的关系,可通过测量地面的振动速度得到地面的位移,为了测量振动频率高于固有频率的振动速度,须采用磁电式传感器配接系统构成磁电式振动速度传感器,其结构如图5所示。

图5 磁电式传感器结构示意图
对照图5知,由于线圈与传感器的壳体固定在被测物体上,而永久磁铁是通过柔软的弹簧与外壳相连,根据式(5)知,当振动物体的频率远远高于传感器的固有频率时,永久磁铁就接近静止不动,而线圈则跟随振动物体一起振动,这样,永久磁铁与线圈之间的相对位移就十分接近振动物体的绝对位移,由于相对运动,线圈绕组产生的感应电势U为:


根据式(7)知,磁电式速度传感器的输出电压为:

将(3)式两边取导数得:

将(8)式及其一阶导数和二阶导数代入上式得:

其幅频函数为:


从上面的分析可以看出当外界振动物体的振动频率远高于磁电式速度传感器的固有频率时(一般要求ω>4ω0),振动速度和传感器的输出电压成正比;振动速度通过积分可得振动位移。
2.3 加速度传感器
通过加速度传感器测量振动物体的加速度,在经过二次积分就可得到振动位移,一般采用压电式加速度传感器,振动物体的加速度;

将式(13)代入式(3),其幅频响应为:

对于压电式加速度传感器的阻尼比D很小,可忽略不计,当ω<<ω0时,有这说明质量块的相对位移与物体振动加速度成正比,与前面介绍的惯性式位移传感器和磁电式传感器不同,质量块不能被认为是静止的基准。压电式加速度传感器输出的电荷量与物体振动加速度成正比,通过测量就实现了对振动加速度的测量。
3 选型研究分析
无论是惯性式位移传感器、磁电式传感器以及加速度传感器都能够用于测量地面的位移,但是作为落锤式弯沉仪测量地面弯沉值的弯沉传感器有其特殊的要求,考虑落锤式弯沉仪所测量对象为振动的地面,荷载冲击持续的时间约为25ms左右,采用加速度对中心弯沉水泥地面进行测量,其采集数据如图6所示。

图6 落锤过程中心地面位置的加速度曲线和功率谱
图(a)为采集加速度信号的时程曲线,图(b)为对加速度信号通过数值积分得到的位移时称曲线,图(c)为加速度信号通过FFT得到的功率谱,对于不同路面材质、结构、缓冲块以及不同高度落锤其频谱分布将不同,一般其主要频率分布于0~200Hz之间。
从上面各种传感器的理论分析中可知传感器的固有频率直接关系着弯沉测量的准确性,因此,在选择弯沉传感器时一定要先分析清楚地面振动的谱分布,在此基础上再选择合适的传感器。目前使用惯性式位移传感器可根据要求自行设计合适的固有频率和阻尼比,从理论上分析传感器固有频率越小,其频带越宽,阻尼系数一般选择0.7左右,但是从物理实现角度考虑,若该传感器固有频率过小,则传感器的体积较大,且结构复杂,并且其阻尼系数难以调节、易变化,因此不适合落锤式弯沉仪的使用。虽然磁电式速度传感器测量值为地面的振动速度,但是可通过积分电路或数值积分的方法得到地面的振动位移值,目前磁电式速度传感器存在4.5、8、10Hz等不同的固有频率,开环阻尼比一般在0.4~0.8之间,为得到不同的阻尼比仅需在传感器的输出端并接不同阻值的电阻即可,且其阻尼比稳定,不易受外界环境的影响。由于该类型传感器属于自发式传感器,不需外部供电即可进行振动速度的测量,并且体积小,重量轻,免维护等优点,这也是国外FWD生产商多选择磁电式传感器的理由。加速度传感器的固有频率一般约为几十KHz,从传感器频响特性上考虑,加速度传感器能够很好地覆盖落锤式弯沉仪作用地面的频率范围,但是由于压电式加速度传感器的阻尼比一般不大于0.04,因此造成加速度传感器过于灵敏,且要求稳定时间长,若选用加速度传感器测量地面的位移,存在积分零点难以寻找的问题,这样会造成较大的数值积分误差。并且加速度传感器和配套的电荷放大器价格昂贵,不宜作为落锤式弯沉仪的弯沉传感器。
4 结语
本文在简单介绍弯沉检测技术发展的基础上,对几种可用于测量弯沉的传感器进行的深入理论分析,并且根据落锤式弯沉仪的工作特点,对惯性式测振位移传感器、磁电式速度传感器和压电式加速度传感器用于测量弯沉进行了优缺点分析,为选择合适的弯沉传感器提供了依据。
猜你喜欢
当代水产(2022年6期)2022-06-29
化工机械(2022年1期)2022-03-21
建材发展导向(2019年20期)2019-11-09
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中国公路(2017年17期)2017-11-09
振动与冲击(2014年21期)2014-09-18
中国神经再生研究(英文版)(2014年23期)2014-06-01
客车技术与研究(2014年3期)2014-03-20