基于In-Fusion技术车载移动测量系统定位精度分析
2018-12-26 08:35李彬,范琳
地理空间信息 2018年12期
李 彬,范 琳
(1.青海省基础地理信息中心,青海 西宁 810001;2.青海省地理空间信息技术与应用重点实验室,青海 西宁 810001;3.青海省第二测绘院,青海 西宁 810001)
随着测绘与地理信息系统(GIS)对地理空间信息数据准确性和及时性要求不断提高,为满足以较低的成本,获取比传统测绘更多、更全的空间地理信息数据,而又保证测量精度要求,移动测量技术应运而生。自1990年第一台车载移动测量系统GPSVan问世至今,车载移动测量技术已历经20多年发展。2006年李德仁院士指出:“车载移动测量系统是当今测绘界最为前沿的科学技术之一,代表着未来道路电子地图测绘领域的发展主流”[1]。因车载移动测量能高效、高精度地快速获取行进轨迹两侧三维地理信息数据,目前已广泛应用于城市三维建模、大比例尺测图、城市部件普查、公路建模、竣工测量、矿山测量等项目[2-4],系统定姿定位精度引起生产单位的重视。如何保证车载移动测量系统在城市峡谷、GNSS信号干扰等复杂环境下POS精度,有效减少数据重复采集获取工作量,成为各生产单位必须解决的问题。
1 车载移动测量系统
车载移动测量系统(MMS)将多个传感器集成于车载移动平台,在基于时间同步的条件下,以实时导航或后处理方式提供连续导航定位信息,内业多传感器数据融合处理后获取三维地理空间数据的测量系统。系统所配载的定位定姿传感器主要包括GNSS全球导航卫星系统、INS惯性导航系统、GAMS方位测量子系统和DMI距离测量指示器等设备,其核心部件是GNSS系统和INS惯导系统。惯导系统是利用加速度计、陀螺仪等惯性元件测定载体运动期间惯性坐标系下加速度、角速度信息,通过积分计算获得运动载体位置和速度等数据。IMU惯性测量单元反映INS惯性导航系统状态,包含3个加速度计和3个陀螺仪。加速度计测定运动载体在惯性空间坐标系中的线性加速度,陀螺仪测定惯性导航设备运动的旋转角度。惯导系统有平台式惯导系统和捷联式惯导系统[5]。平台式惯导系统将惯性测量设备安装于惯性平台,系统精度高,但结构复杂、体积庞大、使用寿命短等缺点使其很难在民用领域应用。捷联式惯导系统将惯性测量设备直接安装在移动载体上,以数字计算代替平台模拟跟踪,有效提升系统精度、性能和可靠性,目前已广泛应用于民用领域[6]。
2 定姿定位基本原理
定姿定位系统(position and orientation system)以GNSS/INS技术为核心,通过卡尔曼滤波对获取的原始导航定位数据建立误差方程进行误差估计和修正,以实时解算或者后期处理方式来计算运动载体空间位置与姿态。GNSS系统连续、全天候提供高精度的时间、空间和速度信息;INS惯导系统通过惯性传感元件获取运动载体的位置、速度和姿态信息,抗干扰能力强,数据采样率高,短期精度和稳定性好。结合GNSS和INS技术,利用高精度GNSS定位信息来修正INS的系统漂移,通过INS采样数据来弥补GNSS系统采样率不足,最终获得高精度和高采样率运动轨迹。定姿定位系统传感器测量值包含随机误差部分状态和系统部分状态的线性组合(滤波中物理量称为状态),需对观测量进行最优估计[7]。卡尔曼滤波是递推线性最小方差估计,通过建立空间状态数学模型,将GNSS误差、加速度计零偏和陀螺仪漂移等作为状态矢量,以INS观测量和GNSS观测量作为量测修正信息,组成GNSS/INS组合导航的状态方程,通过解算误差状态不断校准修正系统,获得高精度组合导航解。卡尔曼滤波算法不需要存储所有观测数据,仅根据前一次估计和新的观测数据计算更新估计获取精确轨迹导航解,较传统导航定位算法有更高效、快捷的优势。
3 车载定姿定位系统组合导航策略及In-Fusion技术
车载定姿定位系统(POS LV)组合导航是通过高性能计算机对GNSS系统观测数据和INS系统传感器获取的高采样率位置、速度、姿态数据,通过不同的组合策略进行实时解算,获取不同精度的实时导航解。
3.1 车载定姿定位系统组合策略
车载定姿定位系统(POS LV)根据不同传感器数据组合解算方式分为如下三类组合策略:非耦合组合方式、松组合方式和紧组合方式[8]。
1)非耦合组合方式:将获取的GNSS全球导航卫星系统、INS惯性导航系统原始观测数据分别输入卡尔曼滤波器,获取单一、低精度导航解,GNSS系统和INS系统数据间无反馈。非耦合组合方式虽然算法简单、易实现,但由于定位精度低,不适合在车载定姿定位系统中使用。
2)松组合方式:将GNSS全球导航卫星系统获取的观测数据处理成位置、速度信息输入卡尔曼滤波器,通过最小二乘估计改正INS惯性导航数据,并将GNSS和INS参数值输入组合处理器中,获取单一组合导航解。
3)紧组合方式:GNSS给INS提供精确的位置和速度信息,以修正INS系统漂移,控制误差累积;INS给GNSS提供实时位置和速度信息来估计模糊度,构建观测误差方程,输入卡尔曼滤波器,通过组合处理获取精确的导航解。紧组合方式组合导航策略广泛应用于车载定姿定位系统。
3.2 In-Fusion 紧组合技术
IN-Fusion技术采用GNSS辅助INS紧组合处理解算方式,通过建立深度传感器组合和误差模型,显著减少或消除标准组合的限制,获取更优定位精度和更高可靠性的导航定位。其实时处理解算称为惯性辅助实时动态定位(IARTK),后处理解算称为辅助动态整周模糊度解算(IAKAR)[9]。
惯性辅助实时动态定位(IARTK)技术中卡尔曼滤波不直接处理GNSS接收机伪距和载波相位观测值,而是通过导航滤波器[10]。在只能接收到3颗及以下GNSS数据下,即使不能获取导航定位解,也持续接收GNSS观测值,与INS惯导数据进行组合解算。GNSS信号中断期间,集中式卡尔曼滤波器进行模糊度的估计和解算,通过INS惯导数据来解算最初的整周未知数,并保持“记忆”整周未知数, GNSS导航定位数据恢复后IARTK技术几秒钟内将导航定位精度恢复都1~2 cm。IARTK技术有效保证数据中断期间导航定位的连续性和准确性,将导航定位精度控制在一个很小的漂移率上,具有单GNSS接收机的车载测量系统不可比拟的精度和可靠性。
辅助动态整周模糊度解算(IAKAR)算法类似于惯性辅助实时动态定位(IARTK),在数据后处理阶段执行向前组合差分、向后组合差分、动态模糊度合并、精密向前组合差分、平滑处理,结合GAMS数据和DMI数据,能快速计算正确的模糊度,最终输出轨迹最优平滑估计(SBET)。In-Fusion GNSS辅助INS体系框架,如图1。

图1 In-Fusion GNSS辅助INS体系框架
4 实验与分析
为了准确分析车载移动测量系统定姿定位精度,本文选取2016年西宁市城北区(XNCB)和西宁市城西区(XNCX)2个任务区测试数据,测试段POS数据通过与单基站GNSS数据进行紧组合差分后处理,分析测试段数据GPS卫星失锁情况、卫星几何分布情况、多路么效应等情况下后处理轨迹精度。同时选取西宁市城西区(XNCX)测试段数据加入GAMS和DMI观测值进行POS解算,评定数据对车载移动测量系统定姿定位精度和稳定性的影响。
4.1 XNCB和XNCX测试分析
西宁市城北区(XNCB)测试段数据位于城北区海湖大道,道路视野开阔,基站选址位于园区广场,GNSS接收机测试段可接收有效卫星数目10颗以上,单基线长度小于10 km,满足Single Base基线解算要求。海湖大道上车辆较少,行车平均时速小于50 km/h。为保证数据质量,严格按照要求进行系统作业前后对齐、收敛。后处理POS数据定位中误差如图2,北方向位置中误差0.88 cm;东方向位置中误差0.89 cm;高程位置中误差1.55 cm。在整个测试路段,POS数据无GNSS卫星数据失锁、无明显多路么效应影响,卫星空间位置精度(PDOP)小于3,XNCB测试段数据卫星数及位置精度因子见图3。平面精度小于1 cm,高程精度小于2 cm,满足工程测量对POS精度的要求。

图2 XNCB-定位中误差
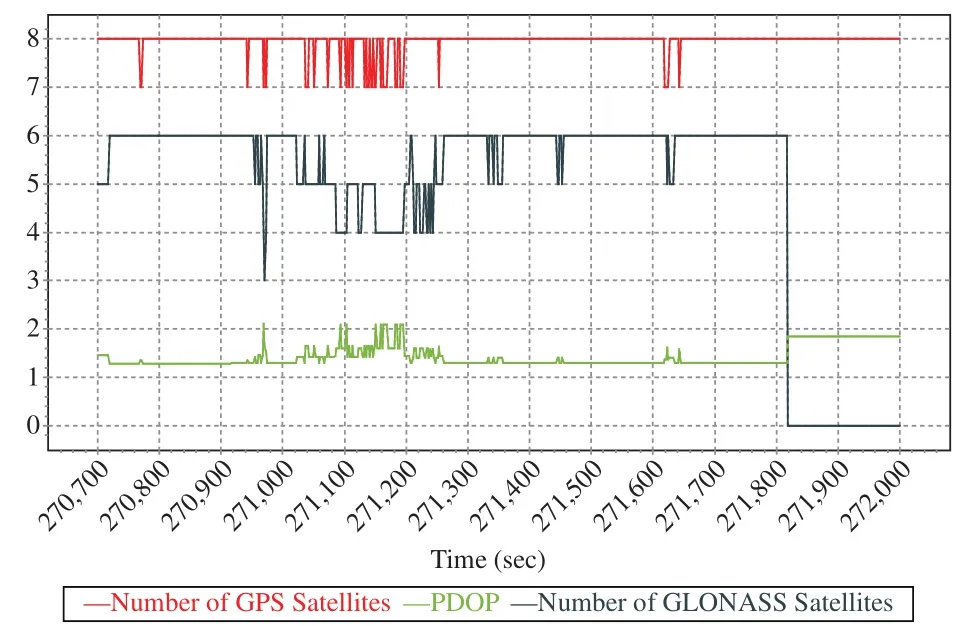
图3 XNCB-卫星数及位置精度因子
西宁市城西区(XNCX)测试段数据位于城西海湖新区,测试路段多为城市峡谷。GNSS接收机可接收有效卫星数目10颗以下,部分路段卫星颗数仅为4颗。基站位于海湖体育场附近,基线长度小于10 km,任务区内车辆较多,行车平均时速小于40 km/h。数据后处理POS数据定位中误差如图4,北方向位置中误差1.01 cm,东方向位置中误差0.98 cm,高程位置中误差3.12 cm。测试路段POS数据多次出现GNSS卫星数据失锁情况,定位精度出现一定程度下降,XNCX测试段数据卫星数及位置精度因子具体见图5。在445500-445800历元期间,因接收卫星数量少、空间位置精度差,PDOP值超过5,平面定位中误差短暂增大,高程方向定位中误差上升到10 cm以上,但几分钟后GNSS信号恢复,定位精度恢复很高的水平。XNCX测试段POS精度基本满足工作测量精度要求,但对卫星严重失锁超过5 min以上的测试段,需对POS数据进行纠偏处理等手段以满足工程测量需要。

图4 XNCX-定位中误差

图5 XNCX-卫星数及位置精度因子
4.2 GAMS和DMI分析
1)GAMS精度分析。GAMS方位测量子系统通过配置双频主副天线测量航向,将航向角和惯导数据输入卡尔曼滤波器参与解算,降低GNSS载波相位数据噪声,减小高纬度地区航向降低对定位精度的影响。因GNSS信号中断,INS在几秒钟内重新启动GAMS精确计算航向,有效提高惯导系统航向精度。当车载移动测量系统通过城市峡谷、建筑信号堵塞或多路么反射严重区域,GAMS航向数据参与计算得到低位置漂移的最优轨迹估计。XNCX测试段位于城市峡谷地带,通过选取GAMS数据参与POS解算和禁止GAMS数据参与POS解算轨迹历元精度见表1。

表1 XNCX-精度评定表
XNCX测试段POS数据加入GAMS数据参与计算后,精度无明显提升。GAMS方位子系统能够为卡尔曼滤波器提供准确航向观测值,但不能直接提高后处理轨迹定位精度[11]。
2)DMI精度分析。车载移动测量系统(MMS)配备的距离测量指示器(DMI),测量车辆行进期间旋转车轮的距离增量,测得加速度控制因GNSS数据失锁造成的INS漂移的位置误差,对定姿定位系统精度有一定提升。XNCX测试段加入DMI数据参与解算,能有效提高POS定位精度,特别是在GNSS卫星信号差或失锁路段POS精度有明显提升。不同作业环境、温度会造成DMI里程刻度因子与实验场测定初值有一定不同,必须在系统低速运动下对DMI里程刻度因子误差进行校正,提高车载移动测量系统定位精度[12]。图6为XNCX测试段DMI里程刻度因子。
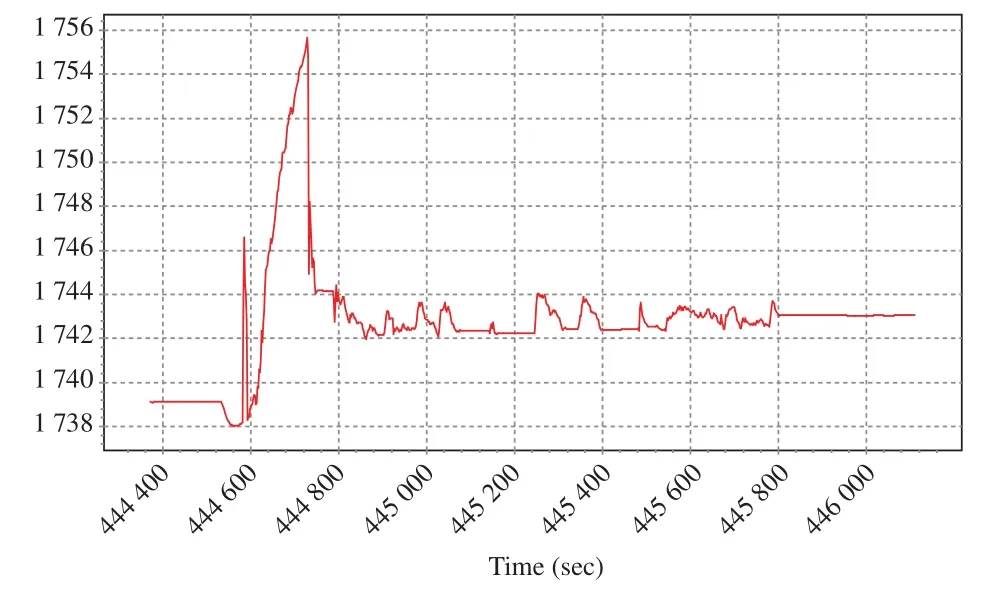
图6 XNCX-DMI 尺度因子
5 结论与展望
本文通过分析车载移动测量系统定姿定位基本原理、实时导航策略和后处理技术,选取位于西宁市区2个不同作业环境测试路段数据进行POS解算、精度评定,测试段移动测量系统定位精度中误差小于5 cm,满足工程测量精度要求。但由于车载移动测量系统多传感器集成的复杂性和作业要求的特殊性,为保证定姿定位精度,需加强系统传感器检校、标定和采集作业流程等方面的质量控制。
1)车载移动系统系统时空同步性是定姿定位系统核心技术之一,必须保证各传感器获取数据的时空一致,以便GNSS、INS、GAMS和DMI等单传感器检校、标定和车载移动测量系统综合检校;
2)工程采集前定姿定位系统必须进行静态对齐,保证POS系统初始化和航向角收敛,工程采集结束后定姿定位系统对齐收敛;随工程采集时间增加惯导系统漂移增加,为达到工程测量要求,必须将工程采集时间控制在1 h以内;
3)车载移动测量系统在城市峡谷区等短暂GNSS信号失锁路段通过后处理能达到精度要求,但长时间失锁也很难保证POS精度,需采取POS纠偏等手段提高精度以满足工程测量要求。
猜你喜欢
军事文摘(2023年4期)2023-04-05
铁道通信信号(2020年8期)2020-02-06
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年2期)2018-12-09
测控技术(2018年4期)2018-11-25
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
电源技术(2015年2期)2015-08-22