PMSM伺服系统的速度环控制器参数整定方法研究
2018-12-29 03:40
制造业自动化 2018年12期
(苏州大学 机电工程学院,苏州 215021)
0 引言
永磁同步电机(PMSM)因具有效率高、环保节能、高效能、结构类型多样等特点,在航空航天、船舶电力推进、风机水泵、电梯、空调等领域行业都有着极大的应用[1,2]。由于PI控制器的结构简单、实现方便、性能优良、且对控制对象参数变化不敏感,因此被大量应用于PMSM驱动系统[3]。而PI控制器参数的设置将直接影响控制器的控制效果,如果参数设置不当,系统的性能将大打折扣。
传统的参数整定方法,如Z-N法,临界比例法等,容易陷入局部最优,且调参时需要人工进行大量试验,效率较低,且在试验过程中,试验人员往往以经验为主,根据过往调参时所使用过的调参经验进行试凑,因此得到的试验结果会带有较强的主观性和随机性,整定出来的控制器性能通常也会较差,无法满足性能的要求[4]。随着控制理论的不断发展,出现了一些采用遗传算法、比例增益法、卡尔曼滤波和Elman神经网络结合法来整定速度环控制器参数的方法,但在线的高阶矩阵求逆计算会占用大量的系统资源,对硬件要求较高,大大限制了这些方法的应用[6]。为此,本文基于速度环控制器的数学模型,以相角裕度作为衡量系统稳定性的指标,通过系统的开环传递函数来计算出控制器的参数,并在保证系统稳定的前提下,进一步加快系统的响应,对于速度环控制器参数整定方法的研究具有十分重要的意义。
1 速度环控制器数学模型
由于永磁同步电机伺服系统是一个耦合性较强的非线性系统,为了简化永磁同步电机数学模型的推导过程,须作以下五点假设:
1)电机定子绕组的三相在空间上对称分布;
2)空间磁场呈正弦分布;
3)不计磁滞和涡流损耗;
4)忽略铁心饱和;
5)忽略齿槽转矩及其他扰动影响。
根据上述五点假设,采用id=0的磁场定向控制策略,则电机的电压方程如下:
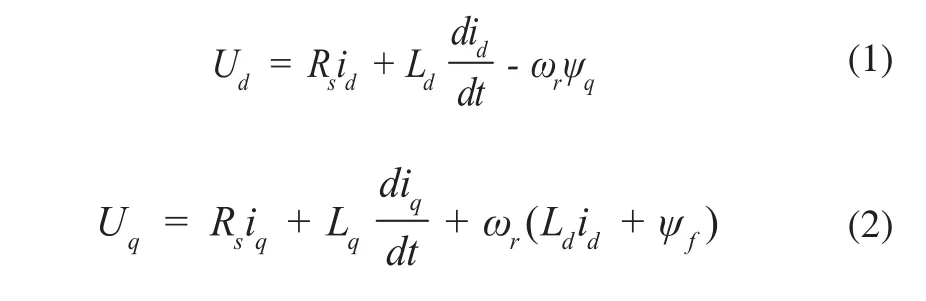
式中,Ud和Uq分别d轴和q轴定子电压,id和iq分别d轴和q轴定子电流,Ld和Lq分别d轴和q轴定子绕组电感,Rs为定子绕组电阻,ωr为电机电角速度,Ψf为电机永磁体磁链。
电机的转矩方程为:

式中,Te为电机的电磁转矩,TL为负载转矩,J为负载转动惯量,ω为电机机械角速度,P为电机的磁极对数,B为粘滞阻尼。
常见的速度环控制器结构为双闭环结构,内环为电流环,速度环控制器的系统方块图如图1所示。其中,速度控制器为PI控制器,传递函数为:

式中,Kp为PI控制器的比例增益系数,Ki为PI控制器的积分时间常数。

图1 速度环控制器的系统方块图
电流环作为速度环控制器的内环部分,由于其带宽远远高于速度环的期望截止频率,因此可以将电流环的闭环传递函数等效为单位增益的惯性环节[7],其传递函数为:

式中,ωc为电流环的带宽。
由式(4)可知,电机电流到电磁转矩的传递函数为:

忽略电机轴上粘滞阻尼对系统的影响,由式(3)可知,转矩到转速的传递函数为:

为了抑制速度信号中所混入的高频噪声对系统的干扰,需要对速度信号做滤波处理,通常选用数字低通滤波来实现,其传递函数为:
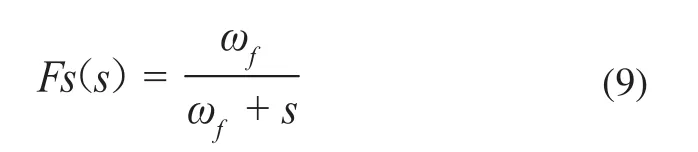
式中,ωf为数字滤波器的带宽。
因此,整个速度环控制器的开环传递函数为:

其系统结构图如图2所示。
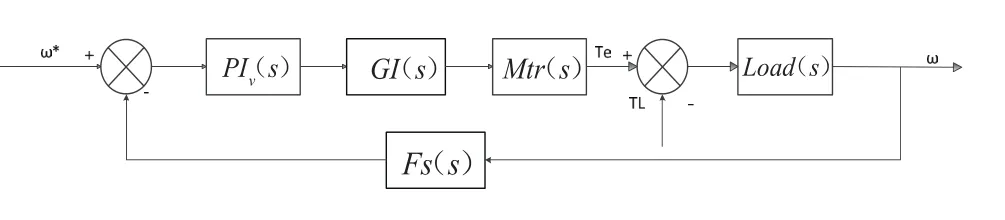
图2 速度环控制器的系统结构图
2 参数整定方法
通过观察速度环控制器的开环传递函数表达式,发现在ω=Ki处存在一个零点,记为Z1;在ω=0处存在两个极点,分别记为P1、P2;在ω=ωf处存在一个极点,记为P3,在ω=ωc处存在一个极点,记为P4,该系统为最小相位系统。根据零点和极点位置分布情况的不同,系统的工作状态及Bode图图像也会不同,这里假设电流环的带宽总是大于速度滤波器的带宽,即极点P4处的频率大于极点P3处的频率,总共会有以下三种可能情况:
1)零点Z1处频率低于极点P3处频率;
2)零点Z1处频率介于极点P3以及极点P4处频率中间;
3)零点Z1处频率大于极点P4处频率。
对于情况一,其Bode图趋势大致如图3所示,通过分析可知,当零点Z1处频率低于极点P3处频率时,由于交接频率ω=Ki处微分环节的作用,相频特性曲线从-180°开始表现为上升的趋势,之后又由于两个惯性环节的作用,曲线开始慢慢下降,因此存在一个极大值点,只要增益设置得当,就可以得到充足的相角裕度来保证系统的稳定性,一旦增益设置的太大或太小,系统工作都将会不稳定。
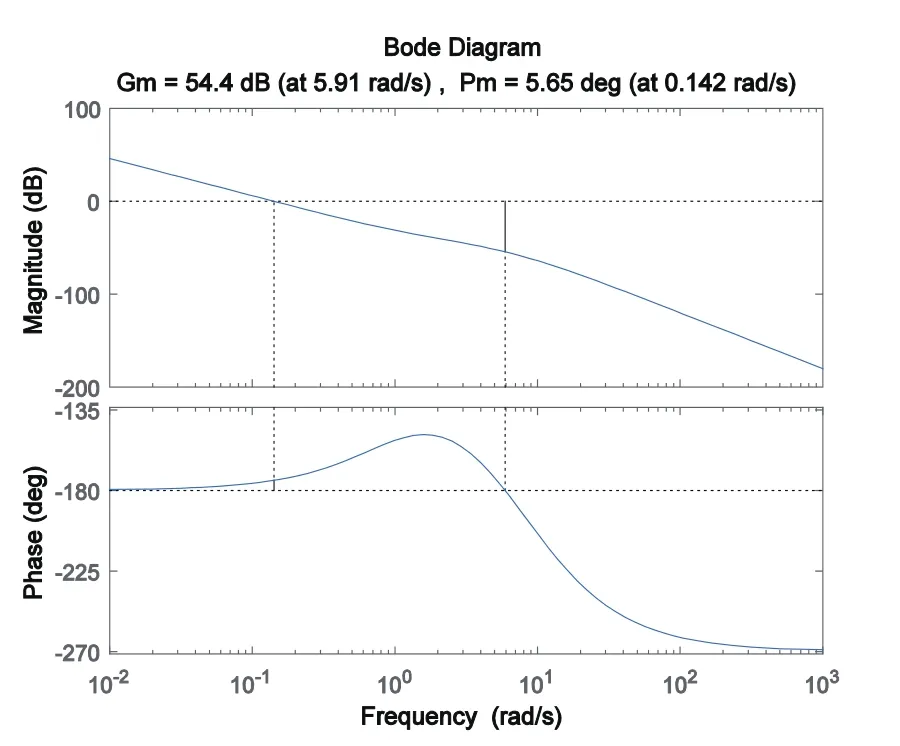
图3 零点Z1处频率低于极点P3处频率Bode图
对于情况二,其Bode图趋势大致如图4所示,通过分析可知,当零点Z1处频率介于极点P3以及极点P4处频率中间时,由于交接频率ω=ωf处惯性环节的作用,相频特性曲线从-180°开始便呈现出下降的趋势,即便在之后会因微分环节而带来曲线走势的部分上升,但相角裕度始终小于零,系统呈现出一种不稳定的工作状态。
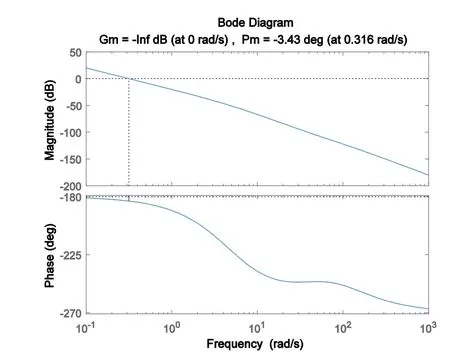
图4 零点Z1处频率介于极点P3以及极点P4处频率中间Bode图
对于情况三,其Bode图趋势大致如图5所示,通过分析可知,当零点Z1处频率大于极点P4处频率中间时,和情况二类似,由于交接频率ω=ωf处惯性环节的作用,相频特性曲线从-180°开始便呈现出一种下降的趋势,最后经过微分环节作用曲线开始上升,并最终趋于-270°,因此该曲线存在一个极小值点,由于相角裕度始终小于零,系统呈现出一种不稳定的工作状态。
三种情况中,只有情况一系统可以稳定工作。
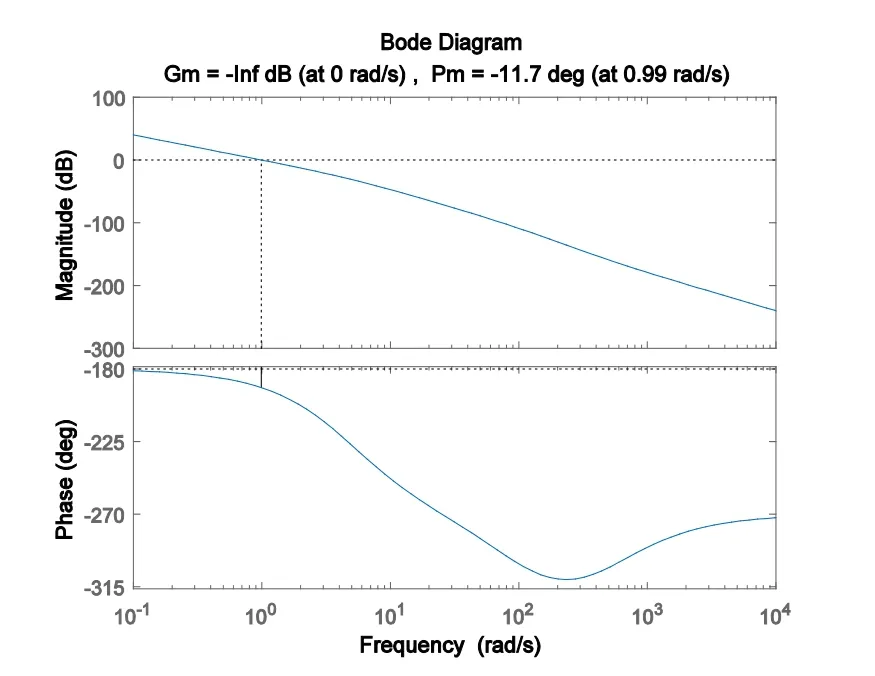
图5 零点Z1处频率大于极点P4处频Bode图
相角裕度值的大小决定了系统的稳定性,对于PI控制器的调试,通常要求增益穿越频率处于开环相位的峰值附近[10],由于电流环带宽一般远大于滤波器的带宽,因此在进行稳定性分析时,可考虑忽略极点P4所带来的影响,因此速度环控制器的开环传递函数可简化为:

为了满足使增益穿越频率处于开环相位的峰值附近这一设计条件,现假设零点Z1处频率和极点P3处频率关系为:

则有:

由于微分环节和惯性环节的相频特性分别为arctanTω和-arctanTω,对于速度环控制器,其简化过后的开环传递函数的相频特性曲线可表示为:

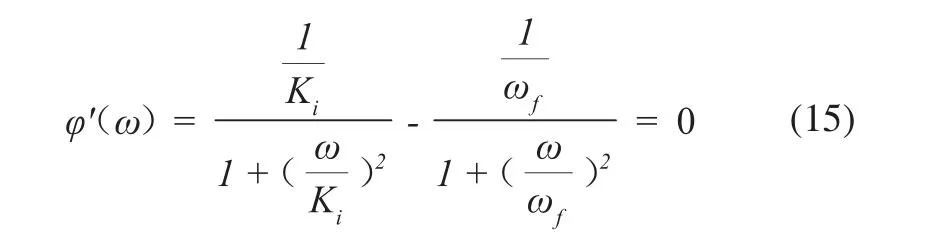
解得:

故速度环控制器的增益穿越频率的位置应处于Bode图中零点Z1处频率所在位置和极点P3处频率所在位置的中间,因为增益穿越频率处的增益为单位增益,故有:
通过对式(17)求解,可得:
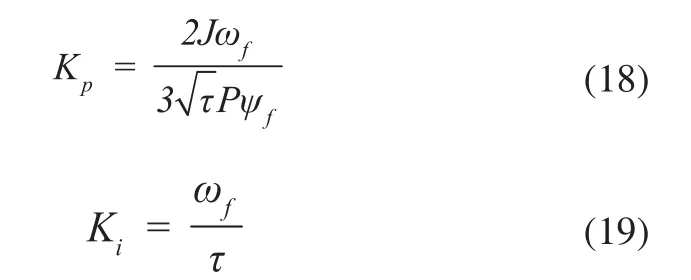
将式(16)所解得的ω代入式(14),可得相角裕度为:
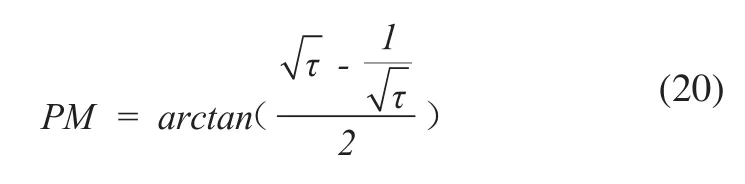
上述过程中求得的Kp,Ki即为整定参数,这两个参数的适用条件为电流环带宽远大于滤波器的带宽,一般为5倍或者5倍以上频率。将整定得到的参数代入速度环控制器的传递函数,得到整定后控制器Bode图如图6所示,此时相角裕度为极大值。
通过对式(20)分析可知,随着τ取值的不断增大,相角裕度的极大值也会随之增大,即系统的稳定性也会随之加强。
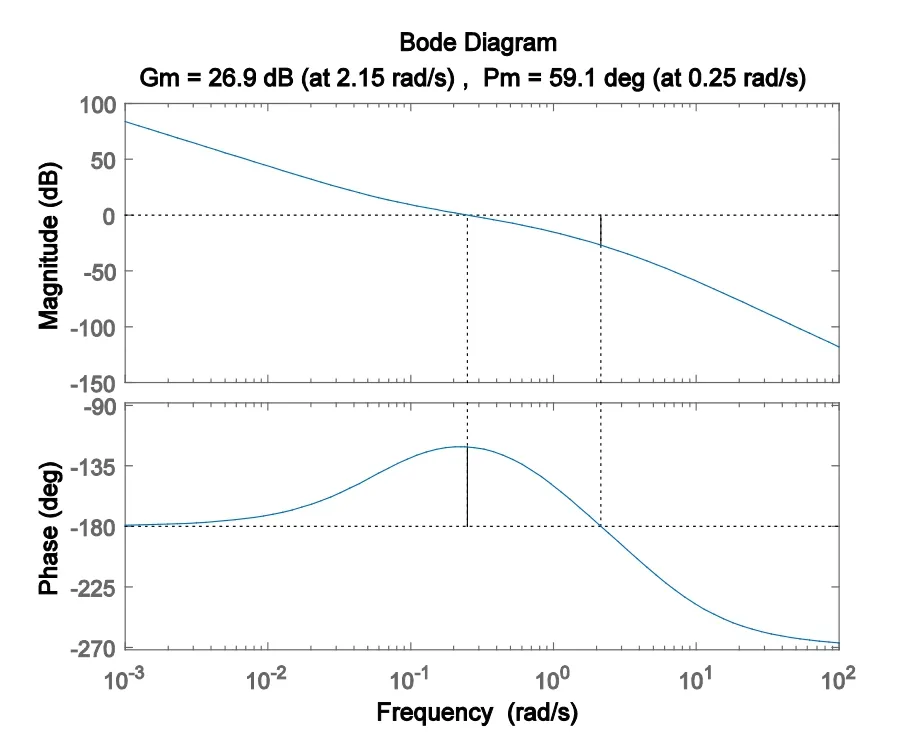
图6 整定后的速度环控制器Bode图
3 仿真与实验分析
采用Maxon的EC-i 40系列449464型号电机作为被控对象,该款电机的特性如表1所示。
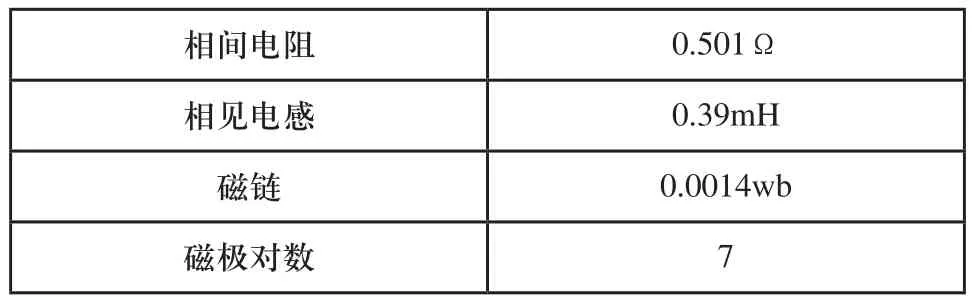
表1 电机特性参数
在Simulink中搭建速度环控制器系统,模型系统按照图2所示的速度环控制器来搭建,如图7所示。搭建的如图8所示的实验平台,按图中所示编号顺序依次为1号:DSP控制板,2号:开关电源,3号:电机驱动板,4号:Maxon电机。
实验中选择电流环的带宽和滤波器的带宽分别为3000Hz和500Hz,为了展示控制效果,分别进行在相同负载情况下选取不同τ值以及在相同τ值情况下选取不同负载一共两组参数整定仿真和实验。
3.1 相同负载情况下的参数整定
选用转动惯量为100gcm2的负载,并选用τ值为5,10,20进行实验,整定得到的参数如表2所示。
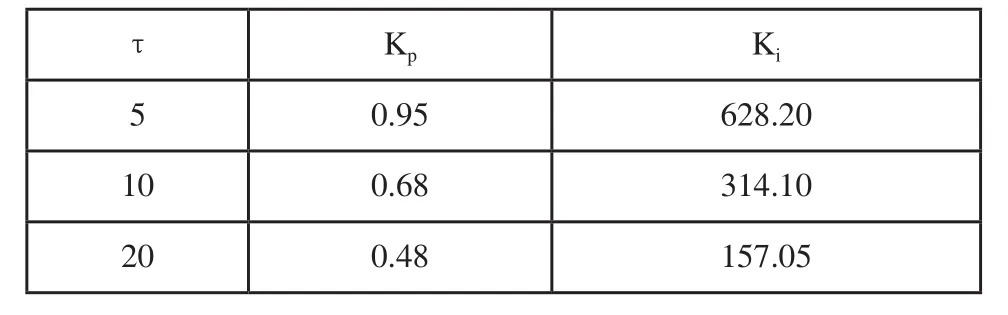
表2 100gcm2负载下不同τ取值下的整定参数

图7 Simulink中搭建的速度环控制器
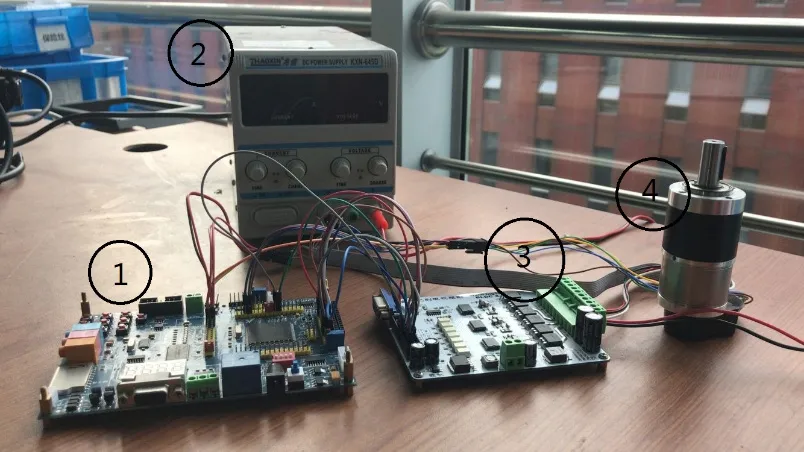
图8 速度环控制器实验平台
通过Simulink仿真和实验所得到的速度阶跃波形分别如图9(a)和图9(b)所示,其中,蓝色曲线为τ=5时的响应曲线,红色曲线为τ=10时的响应曲线,绿色曲线为τ=20时的响应曲线。通过对图像的分析可知,无论是用仿真还是实验,所得到的阶跃响应波形均具有如下特性:
1)随着τ值的增加,系统的超调量会随之减小;
2)随着τ值的增加,系统的上升时间随之增大。
从这两个特性中可以看出,即随着τ取值的不断增加,系统的相角裕度会增大,因此系统的稳定性就得到了提高,但相应的系统的响应速度会有一些下降,这与最初的分析相符。
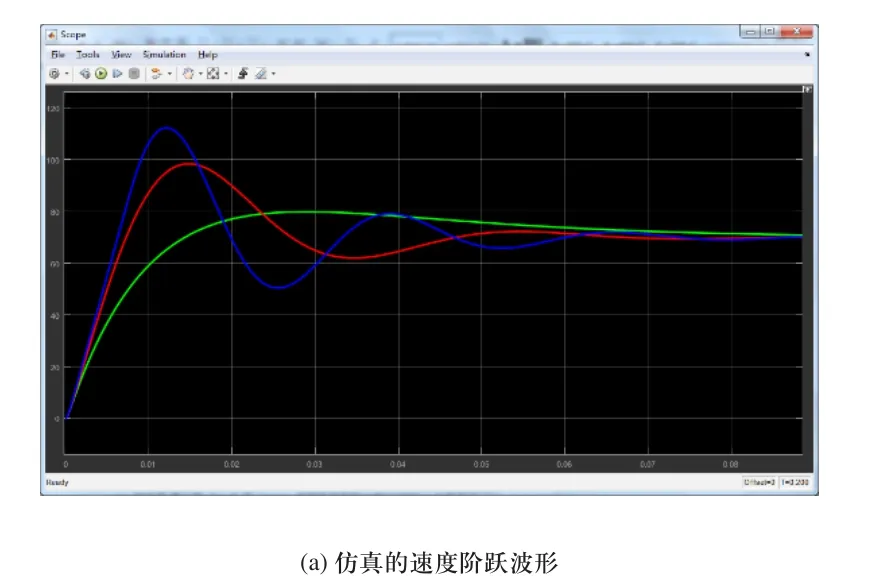
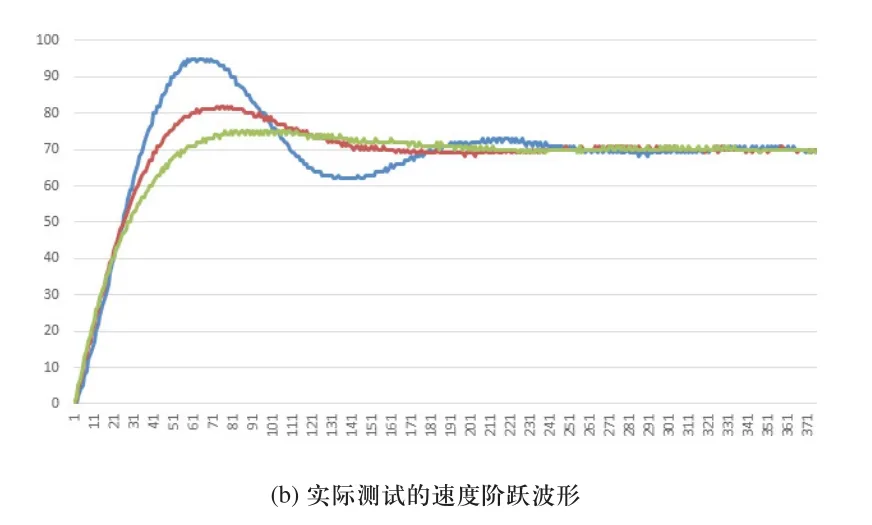
图9 速度阶跃波形
3.2 相同τ值情况下的参数整定
选用τ值为20,转动惯量为100gcm2和500gcm2的负载进行实验,整定得到的参数如表3所示。
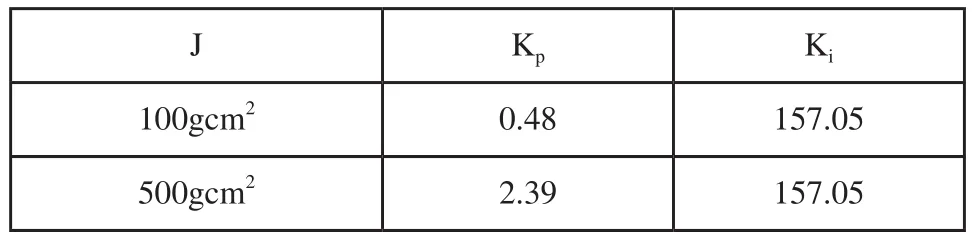
表3 τ值为20下不同负载的整定参数
通过Simulink仿真和实验所得到的速度阶跃波形分别如图10(a)和图10(b)所示,其中,红色曲线为转动惯量为100gcm2的响应曲线,蓝色曲线为转动惯量为500gcm2的响应曲线,通过观察曲线可知,当负载加大时,系统的上升时间变长,即系统的响应速度变慢,如果想要提高系统的响应速度,可以适当的减小τ的取值以此来提高系统的响应速度,不过这样会牺牲部分系统的稳定性。
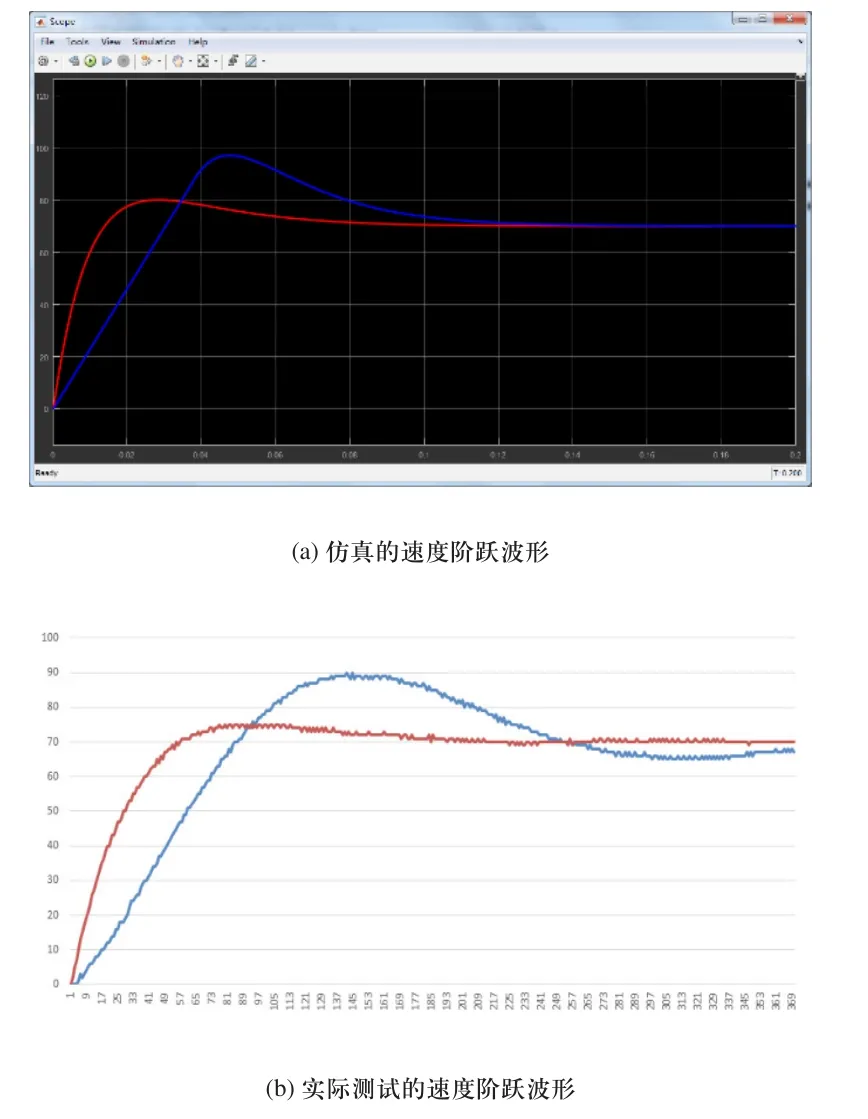
图10 速度阶跃波形
4 结束语
本文提出了一种基于速度环控制器结构模型,采用频率响应的设计方法来对PMSM伺服系统的速度环控制器参数进行整定的方法,通过对速度环控制器传递函数的零点和极点分布情况的不同,讨论了可使系统工作稳定的零点和极点的分布情况,并依据使系统相角裕度最大的设计原则对速度环控制器的参数进行了设计和整定。仿真和实验表明,采用这套方法所整定的控制器参数具有可靠性高、响应快的特点,对于电机转速具有良好的控制效果,在实际工程应用中具有一定的应用价值。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
新高考·高三数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年5期)2021-07-21
中学生数理化(高中版.高考数学)(2021年5期)2021-07-21
水泥工程(2020年4期)2020-12-18
新高考·高一数学(2019年4期)2019-09-07
电子制作(2018年1期)2018-04-04
江苏农业科学(2016年5期)2016-07-23