基于双尾鳍式的新型仿生自主式水下机器人
2018-12-29 06:36徐跃章海屈晓坤付宗国袁跃峰
机械工程师 2018年1期
徐跃, 章海, 屈晓坤, 付宗国,b, 袁跃峰
(浙江海洋大学a.船舶与机电工程学院;b.浙江省近海海洋工程技术重点实验室,浙江 舟山 316022)
基于双尾鳍式的新型仿生自主式水下机器人
徐跃a, 章海a, 屈晓坤a, 付宗国a,b, 袁跃峰a
(浙江海洋大学a.船舶与机电工程学院;b.浙江省近海海洋工程技术重点实验室,浙江 舟山 316022)
为了解决现有自主式水下机器人续航时间短和水中所受阻力大等问题,文中主要设计了一种基于仿生学原理、死点定理和摆动导杆机构的双尾鳍式新型的自主式水下机器人,并详细介绍了它的运行、组成及各个模块的作用。它具有投放回收方便简单、所受阻力小和续航能力久等特点。这种设计在用于复杂的海底勘探和海底维修、救援等任务中增大了该自主式水下机器人的使用程度,并能达到较高的效率。
双尾鳍;自主式水下机器人;摆动导杆机构;仿生学;死点定理
0 引 言
自主式水下机器人(AutonomousUnderwater Vehicle,AUV)是无人水下机器人(Unmanned Underwater Vehicle,UUV)的一种。我国在AUV的使用方面可以分为民用和军用两个领域。在民用领域,AUV可用于铺设管线、海底考察、数据收集、水下设备维护与维修等;在军用领域则可用于侦察、扫雷、援潜和救生等。
21世纪是一个海洋开发探索的时代,AUV作为新一代水下机器人,具有活动范围大、机动性好、安全、智能化等优点,是完成各种水下任务的重要工具。现在的AUV一般都做成长筒形,尾部装一个螺旋桨,这样的设计受到海水的阻力小,但是不能装载较多的仪器设备供探测使用,续航能力差,且投放和回收一般在深水进行;另外有一种AUV做成类似长方体形状,在底部会装上机械手用于海底管道的维修和铺设、海底救援等任务,但是这种AUV不具有高速移动的性能,因为在海中受到的阻力太大,且投放和回收也只能在深水中。
中国的AUV技术研究开始于1985年左右,中国科学院沈阳自动化究所设计了“海人一号”遥控式水下机器人试验样机。2008年我国AUV在深海6000 m的实验成功,使中国在AUV技术和应用方面有着质的飞跃。CR-02型AUV可以用来海底复杂环境下的海底资源的调查、测量、深海科学考察等。目前我国已经形成系列的AUV,且在太平洋海域成功运用。
国外的研制开始于1950年后,一开始用于水文调查、海上石油的开发、打捞试验丢失的海底武器等。20世纪80年代末,随着计算机技术、微电子等技术的突飞猛进,使AUV得到了大力发展[1]。
该装置作为一种新型的AUV,利用了仿生学原理和机械原理中的知识。其外观主要借鉴了海豚的外形,在前半身是海豚的形状,前部是扁平的喙,身体两侧各有一个胸鳍,用于该AUV的运动平衡,背部有一个背鳍;在尾鳍方面,该装置采用了双尾鳍[2-4]设计,两个尾鳍进行相向运动;在装置内部,给尾鳍提供动力的是一个摆动导杆机构,内部还装有脉冲发生/接收器,深度传感器,实时图像处理平台,岩石探测器,蓄水仓等设备;在装置下面,装有3对车轮,可以在海底进行着陆及浅滩中投放和回收,车轮的收起放下采用类似飞机起落架的结构;尾鳍形状采用金枪鱼月牙形尾鳍[5-7],这种具有更高的推进效率。该种AUV具有更好的续航能力,对环境影响小,使用率更高等特点。
1 AUV的系统设计
该AUV的系统运行流程如图1所示,装置自带的电源给控制平台供电,控制平台控制脉冲发生器发出脉冲,返回的脉冲信号用接收器接收,并由图像处理平台显示,用短波收发信机传递给地面控制中心,对海底开发提供海底地形数据等,同时把数据传给控制平台。当系统识别到前方有障碍时,控制平台驱动电动机,让尾鳍左右摆动或自身蓄水仓内储水/排水,让自身装置进行上升、下沉、前进、转向等运动。控制平台同样让岩石探测器等设备工作,把在海底采集的岩石数据传回到地面控制中心,为海洋开发提供真实材料。
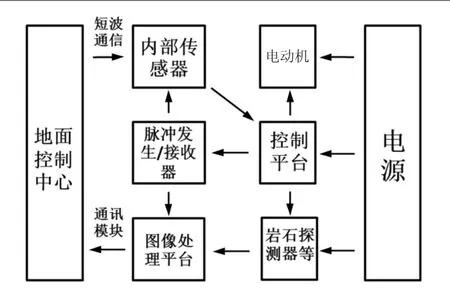
图1 系统运行图
1.1 AUV的各部分组成设计
1)仿生学设计。仿生学是一门模仿生物的特殊本领,利用生物的结构和功能原理来研制机械或各种新技术的科学技术[8]。我们利用仿生学原理,将海豚的形状应用到AUV的机体上,将金枪鱼月牙形尾鳍应用到AUV的尾鳍上,将鱼尾鳍的运动应用到AUV的推进系统上。这些生物都经历过千百年的演变和进化,十分适应环境,我们将它们的特点应用于我们的AUV上,可以提高AUV的性能。
2)AUV整体分布。机身(类似海豚的体型)、胸鳍、背鳍、扁平的喙、起落架、车轮、尾鳍、摆动导杆机构、电动机、储水仓、千兆转换器、GPS、短波收发信机、电源脉冲发生/接收器、实时图像处理平台、罗盘、航姿系统、深度传感器、立体相机、实时控制平台、岩石探测器等设备,如图2所示。

图2 整体分布图
1.2 AUV运作
该AUV的运作可以分为尾鳍推进模块、浮潜模块、着陆模块、探测模块、平衡模块、机械手辅助模块的工作。
1.2.1 尾鳍推进模块
该模块的运作是该AUV主要运作系统,装置的行进系统采用了双尾鳍摆动,如果是单尾鳍摆动,可能会造成装置行进的不稳定性,双尾鳍相向运动或相对运动,使装置在前进时更加稳定,同时尾鳍产生的紊流会减少。尾鳍的左右摆动采取了机械结构中的摆动导杆机构,电动机驱动主动杆(机械上称为曲柄)一直回转,导杆在曲柄的带动下进行左右往复摆动,从而使尾鳍进行摆动,推动装置前行。机构简图如图6所示。在一个尾鳍单独作用时,可以对装置进行转向,左转则用右边的尾鳍,右转则用左边的尾鳍。尾鳍摆动频率和尾鳍的摆动幅度是影响尾鳍推进作用的主要两个因素[9-11],只要改变这两个因素就可以增大或减小尾鳍推进力。尾鳍的形状是金枪鱼的月牙形尾鳍,这种尾鳍相比较于其他尾鳍具有更高的推动效率[12]。装置使用尾鳍来代替螺旋桨,其原因是经测试尾鳍的推动效率高达90%,而螺旋桨的推动效率只有40%~50%,尾鳍本就是利用流体力学而演变出来的,其性能远高于螺旋桨的机动性能,极大地提高了装置的续航能力。
1.2.2 浮潜模块
AUV的自主上浮与下潜运动,是采用了潜水艇的浮潜原理,在装置内部装有6个蓄水仓,在需要上浮时,电动机运作让蓄水仓内的水排出装置,装置质量减小,浮力大于自身重力,装置实现上浮运动,需要下潜时,则反之。
1.2.3 着陆模块
在AUV底部装了3个起落架,每个起落架上有一对车轮,可以在海底进行着陆和海底前行。同时装置的投放和收回因为装了车轮之后并不需要在深水进行,在沙滩上就可以完成,极大地提高了装置使用的方便度。车轮可以通过起落架收起或放下,这样在海水中前行时可以减小阻力,起落架的结构与飞机起落架相似,其原理是应用了机械原理中的死点定理,如图3所示。
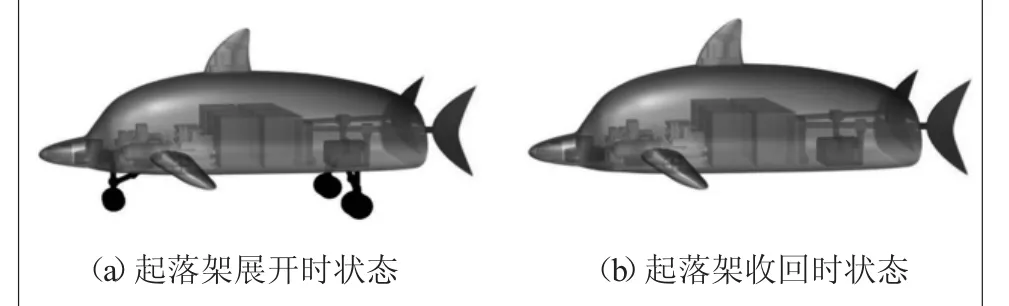
图3 起落架的状态
1.2.4 探测通讯模块
该AUV内部有大量的仪器设备,脉冲发生/接收器装在扁平的喙中,喙在装置的最前端,这样有利于脉冲的接收,脉冲主要探测海底地形与前方障碍物;在背鳍上装有通讯装置、GPS、短波收发信机等,类似于天线,给地面控制中心传送数据或接收地面控制中心的指令;在身体中心部分是一些探测设备,如岩石探测器、立体相机等,对海底进行探测,把探测到的数据与图像进行实时图像处理,再通过通讯设备传给地面。整个过程都是装置自主完成的,同时对数据会进行分析,对AUV自身的行进进行控制,更加智能化。
AUV在海洋中行进可能遇到洋流和海底暗流等情况,为防止装置在海洋中倾翻造成仪器损坏等情况,在两侧的胸鳍中各装有一个陀螺仪,用于检测平衡,并把检测数据发送给航姿系统。在AUV最前端的航姿系统,它会对自己的进行姿态进行检查,如果出现与设定的正常航姿不匹配状态,它会自行伸出防倾板,防倾板左右各有一块,向左倾倒时伸左边的防倾板,向右倾倒伸右边的。平时正常行进时,防倾板缩在机身内,以减少水的阻力。
1.2.6 机械手辅助模块
在需要该AUV去海底执行油路管道的铺设和海底救援等任务时,我们可以在装置底部装上机械手,这样就可以去执行任务了,可以一物多用,代替我们设计的海底机器人、架油路管道的船,具体形式如图4所示。
1.3 AUV的控制
该AUV的控制控制流程大体可以分为两个部分。
1)探测控制部分。电源驱动实时控制平台工作,实时控制平台下达指令,让脉冲发生/接收器、深度传感器、实时图像处理平台等仪器运行。根据接收的脉冲信号和深度传感器显示的数据,在图像处理平台上显示相应的海底地形结构,并把相应数据通过通讯模块传给地面控制中心,供地面人员进行海底开发使用。让岩石探测器对海底进行岩石探测,将探测的数据进行图像模拟,把模拟的图像发送给地面。用立体相机拍摄海洋生物和海底表土,提供探索海洋的材料。
2)行进控制部分。当接收的脉冲信号显示前方有障碍物时,需要控制平台控制电动机工作,电动机分为蓄水仓里的电动机和摆动导杆机构内的电动机,可以分别控制相应的运动,进行上浮、下潜或转向。行进时,陀螺仪会检测自身是否水平,并把数据发送给航姿系统,航姿系统会控制AUV自身行进的姿态,保证AUV是在正常状态下行进。罗盘用来指引方向,这样可以十分明确AUV需要前进的方向。如图5所示。
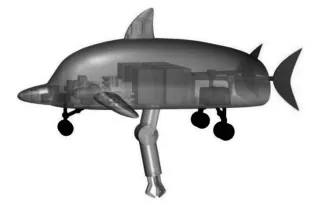
图4 辅助机械手
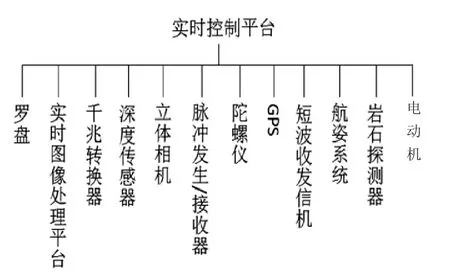
图5 控制结构图
1.4 AUV工作原理
1)摆动导杆机构。摆动导杆机构[13]是一种应用比较广的平面连杆机构,它将曲柄的旋转运动转换成为导杆的往复摆动。在该AUV的尾鳍摆动中采用了摆动导杆机构,既减小了所需空间又让运动得以实现[14]。具体摆动导杆的组成如图6所示,通过坐标轴可以进行矢量求解,求出导杆的角速度和角加速度,从而可以进行尾鳍推进力的计算。
随着轮滑项目教学的开展,教师们教学经验得到了积累,除了自己搜集教学视屏资料学习,还深入到公园、社区与民间轮滑爱好者交流学习,结合教学实践形成了一套体系完整的轮滑教学大纲、授课计划等,对于开设二年级轮滑选项课奠定了基础。
2) 死 点 原理。从Ft=Fcosα知,当压力角α=90°时,对从动件的作用力或力矩为0,此时连杆不能驱动从动件工作。机构处在这种位置成为死点,又称止点。该AUV中的起落架就是利用了死点定理,这样可以使车轮要使用时牢固稳定,不使用时可以收起,十分实用。1.5 应力分析
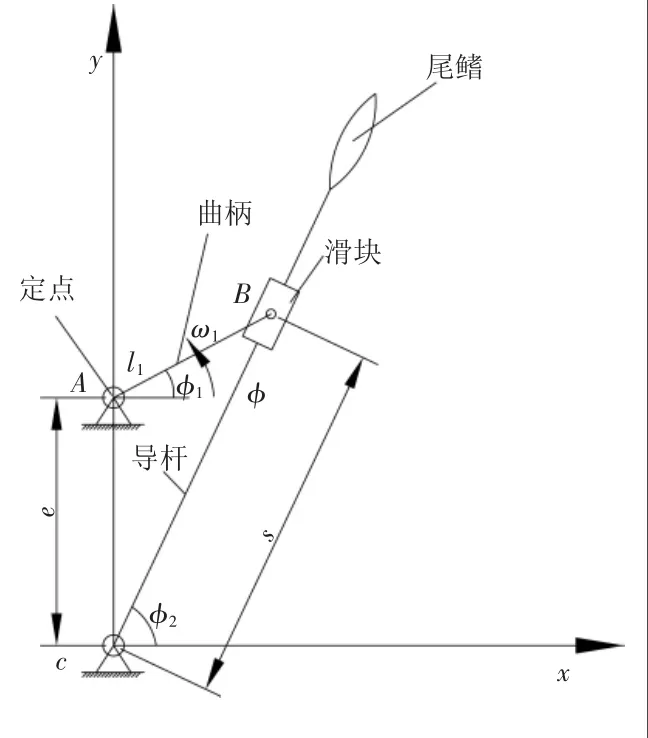
图6 结构简图
选用SolidWorks软件进行尾鳍运动的运动仿真,对尾鳍进行3D模型简化,构建如图7中模型。对尾鳍的各部分尺寸进行选定,定点铰链杆和曲柄高都为10 mm,定点铰链杆直径为1 mm,曲柄长为5 mm、直径为1 mm,尾鳍杆(不含尾鳍)为45 mm,两个定点之间相距25 mm。在静力分析中,曲柄受到了500 N·m的力矩,尾鳍运动机构材料为合金钢,工作温度为323 K。解得数据如图7(应力)和图8(应变位移)所示。从图中可直观看出应力最大点为曲柄和尾鳍杆连接处、曲柄与定点铰链连接处。
2 结语
该AUV的设计极大地利用了仿生学的原理,在外形设计上采用海豚结构,减小在海中的阻力,动力装置采用金枪鱼尾形的双尾鳍结构,其推进效率可以高达90%,提高了续航能力和在海底的工作效率。我国一直强调可持续发展,能源利用的最大化,双尾鳍的使用和螺旋桨相比可以节约不少能源。
该AUV整体较小,生产携带方便,在使用时可以多个AUV同时使用,提高工作效率。它不但可以用于海底探测、数据收集、检测、扫雷等功能,在装置底部装上机械手,可以用于海底救援、设备施工维修等工作,应用较广泛。
[1] 于凯,黄胜,胡健,等.仿生双尾推进的试验研究[J].哈尔滨工程大学学报,2008,29(3):205-208.

图7 应力

图8 应变位移
[2] 于凯,黄胜,王超.一种新型的仿生双尾推进器模型实验[J].实验流体力学,2008,22(1):27-30.
[3] 成巍,苏玉民,秦再白,等.一种仿生水下机器人的研究进展[J].船舶工程,2004,26(1):5-8.
[4] 汤琳,邓见,张军,等.仿生机器鱼尾鳍推进性能试验研究[J].水动力学研究与进展,2010,26(1):698-702.
[5] 马伟锋,胡震.AUV的研究现状与发展趋势[J].火力与指挥控制,2008,33(6):10-13.
[6] 苏玉民,黄胜,庞永杰,等.仿鱼尾潜器推进系统的水动力分析[J].海洋工程,2002,20(2):54-59.
[7] 邸海燕,张庆功.摆动导杆机构运动特性的解析法研究[J].轻工机械,2009,27(2):56-58.
[8] 黄胜.关于仿鱼游动水中推进器的研究的现状与展望[R].大阪府立大学共同研究报告,2001.
[9] 佚名.水下仿生学译文集[M].哈尔滨:哈尔滨工程大学,2000.
[10]董涛.潜器仿鱼尾推进系统的水动力分析[D].哈尔滨:哈尔滨工程大学,2003.
[11]成巍.仿生水下机器人仿真与控制技术[D].哈尔滨:哈尔滨工程大学,2004.
[12]徐新生,孙发明.自然界鱼类游动的力学现象与丰富多彩的仿生鱼设计[J].力学与实践,2009,31(3):109-114.
[13] 程健宇,庄礼贤,童秉纲.鱼类推进性能的数值计算[J].空气动力学学报,1991,9(1):94-103.
[14]彭学伦.水下机器人的研究现状与发展趋势[J].机器人技术与应用,2004,15(3):43-47.
Late-model Bionic Autonomous Underwater Vehicle Based on Double Tail Fin
XU Yuea,ZHANG Haia,QUXiaokuna,FU Zongguoa,b,YUAN Yuefenga
(a.School ofNaval Architecture and Mechanical-electrical Engineering;b.KeyLaboratoryofOffshore EngineeringTechnologyof ZhejiangProvince,ZhejiangOcean University,Zhoushan 316022,China)
In order to solve the problems of short cruise duration and high water resistance in the existing autonomous underwater vehicles,this paper designs a new double tail fin type of autonomous underwater vehicle based on the principle of bionics,the dead point theorem and oscillating guide-bar mechanism.We also introduce the operation,composition and function of each module in detail.It has the advantages of simple and convenient delivery and recycling,small water resistance and long cruise duration.This design is used in the complex seabed exploration and the seabed maintenance,rescue and so on,which increases the use degree of the autonomous underwater vehicle,and can achieve high efficiency.
double tailfin;autonomous underwater vehicle;oscillating guide-bar mechanism;bionics;dead point theorem
TP 24
A
1002-2333(2018)01-0089-04
(编辑浩 然)
徐跃(1995—),本科在读,机械设计制造及其自动化专业;
章海(1970—),硕士,副教授,主要从事机械工程设计。
2017-04-17
猜你喜欢
轻工机械(2022年5期)2022-10-31
橡塑技术与装备(2022年7期)2022-07-06
机械设计与制造工程(2022年1期)2022-02-19
南方农业学报(2020年7期)2020-11-09
模具制造(2019年10期)2020-01-06
江苏科技大学学报(自然科学版)(2018年4期)2018-10-11
汽车零部件(2016年2期)2016-09-26
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07