
六自由度数字化导板定位系统的运动分析及仿真研究*
2019-01-02 02:20万光义程康杰刘云峰姜献峰
机电工程 2018年12期
万光义,程康杰,刘云峰,姜献峰,彭 伟
(浙江工业大学 机械工程学院,浙江 杭州 310014)
0 引 言
最近几年兴起的介入治疗手术方式,能够最大限度地减少外科手术的创面,减轻患者的痛苦,减少手术时间,因此在实际临床操作中得到广泛的应用[1]。介入治疗是微创手术的一种,伴随着3D打印技术的成熟在临床中的应用迅速扩大[2]。由于颌面部血管神经较多,对该部位的手术精度要求也极其严格,颌面部患病的主要治疗方式是在数字化导板的辅助下进行介入治疗。
要针对颌面部介入治疗导板定位进行研究,在颌面部的介入治疗中需要对病患区域进行插针,然后进行粒子植入等一系列操作[3]。没有使用导板定位系统以前,3D打印的导板在病患区域的定位主要是依靠颌面部软组织特征进行定位或者通过患者牙齿咬合导板进行定位,这两种定位方式有极大的缺陷[4]。因此,介入治疗中的3D打印导板定位难、定位精度低的问题亟待解决。
传统的颌面部辅助定位系统主要是立体定向装置,该装置结合数字化影像设备对颌面部局部进行定位,但是缺点是系统操作复杂,实际使用过程中病人自身的移动会导致定位误差较大[5]。颌面部功能区较多且患者对于外观美学也有一定的要求,因此操作需要精细化[6]。2012年邵海峰[7]在针对上颌骨骨折问题定位难的问题,开发了应用上颌骨前鼻棘点三维定位支架装置。该装置参照立体定向仪,能准确地定位上颌骨骨折前的实际位置。2013年王栋等人[8]设计了基于模块化的便携式立体定位系统,定位精度可达2 mm,具有较高的实用价值。但是受限于操作场地和手术流程等,在实际使用体验上仍然和固定式定位系统差别不大。
本研究针对传统导板定位精度低、定位仪器笨重、操作复杂等问题,本研究拟针对设计的一种六自由度导板定位系统进行可行性分析。
1 结构的设计
通常要完全确定工件位置,就需要约束工件的6个自由度,一般采用6个支撑点来限制工件的位置[9]。本文将数字化导板视为理想刚体,根据刚体运动学原理,要想使工件能够绕3个坐标轴(X,Y,Z)旋转,而且可以沿着3个坐标轴(X,Y,Z)移动,就要满足6个自由度。
根据患者的介入治疗需求,颅颌面的立体导板定位系统总体结构设计如图1所示。
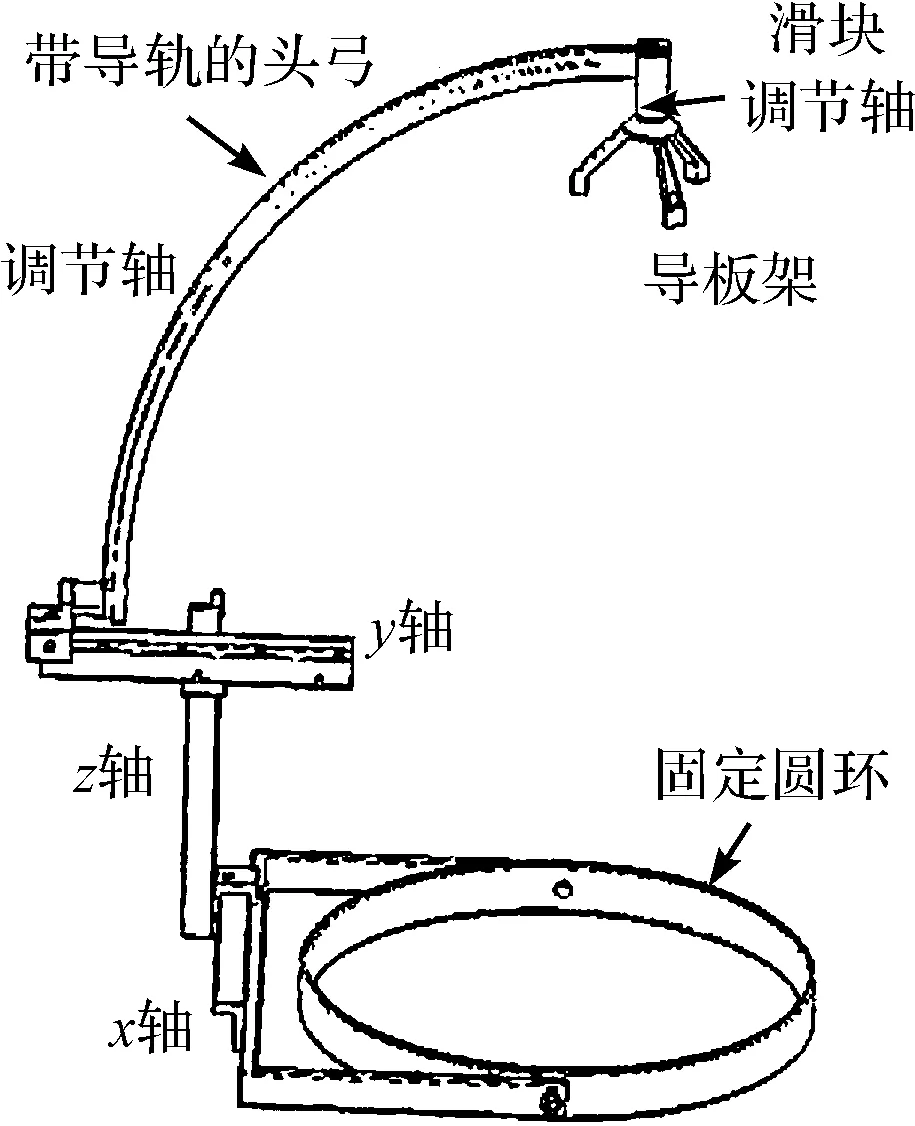
图1 数字化导板定位系统
立体导板定位系统的设计就按照最基本的6自由度式,并在结构上进行相应的设计和组装。图1中支架主要由固定头环、调节轴、头弓、导板架四大部分构成。固定头环套在患者头上,通过孔固定钉在头上定位,为防止固定钉造成头皮的二次伤害,可选择同样的3个刚性板子垫在固定环上螺孔内侧靠近头皮的地方,同时固定钉上可标刻度,在第二次佩戴时候根据第一次刻度和佩戴位置进行固定拧紧。调节轴分为两大部分:第一部分包括x轴、y轴、z轴方向上的导轨和固定板,负责水平和竖直方向上的移动,标有-200 mm~200 mm的刻度;第二部分为可绕x轴、y轴、z轴3个方向上的旋转轴,其中绕x轴方向上可操作旋转设计为滑块沿带导轨的头弓移动。这样既可以保证足够的自由度,也可以方便的在整个病灶区域调节。在带导轨的头弓上标有0°~90°的刻度,绕y轴旋转的调节轴标有0°~180°的刻度,绕z轴方向旋转的调节轴标有0°~360°的刻度。头弓主要设计为贴近颌面部的弧形,并且负责承受导板支架和后期安装导板后的压力,需要具有一定的刚度。导板架设计为三爪手状,其中有可以安装固定导板的3个螺孔,这里将3个螺孔设计为轴向相互平行且等间距,便于调节导板进行配对的计算。
导板定位系统行使的主要功能是:将整个系统固定在头部,在导板架上安装导板,通过调节该系统使得导板到达理想的位置。在运动学上通过建立不同的坐标系确定导板移动前后的坐标,根据罗德里格旋转公式的解法求出定位系统上导板移动前后的旋转角度和平移量即可[10]。
2 运动学分析
定位支架正运动学分析即为给定某一输入坐标和旋转角度数值,得到对应的一组末端执行机构的姿态[11]。理论上定位支架系统可以视作由一系列关节连接起来的刚性连杆组成。笔者在每个刚性连杆上构建固联坐标系,这样可以准确地描述一个刚性杆与下一个刚性杆之间的坐标关系。因此需要采用一种合适的方法来描述相邻连杆之间的坐标方向和参数,常用的是D-H参数法[12]。根据需求,本研究一共建立与定位系统各个移动关节相对应的7个坐标系,如图2所示。
本研究用齐次矩阵描述相邻构建之间的相对平移和旋转的齐次坐标变换。用i-1Hi表示从坐标系O-Xi-1Yi-1Zi-1到相邻坐标系O-XiYiZi的转换关系。根据图2中坐标系的关系由D-H法可以得到运动学正解为:
(1)
式中:li—平移量,i=1,2,3;θi—旋转量,i=1,2,3;s—正弦sin,c—余弦cos,下同。
据悉,此次谈话主要内容涉及重点宣贯公司系统关于深入践行监督执纪“四种形态”规范化试点工作精神,提醒被约谈人积极说清存在问题,对在这次试点工作中能够主动向组织说清问题的,在政策允许范围内给予出路和机会;对遵纪守法、履行好“一岗双责”、管控好廉洁风险提出建议和要求;结合当前形势、所在岗位、业务领域,分析身边存在哪些廉洁风险?对照本业务领域监督执纪问责业务指导书,查找是否存在触“黄线”、踩“红线”、越“底线”的情况;对做好自身、所在岗位及业务领域的廉洁风险管控有哪些思考和措施?对本单位反腐倡廉建设有什么好的意见或建议?谈话对象在遵纪守法与廉洁自律方面有没有需要向组织说明的情况?
上式仅与调节端给定调节的数值li,θi(i=1,2,3)有关;末端的位置表达式即P(x,y,z),可表示为:
(2)
本研究将坐标系{O0}先绕着Z轴旋转γ角度,然后再绕着Y轴旋转β角度,最后绕着X轴旋转α角度,即构成一组Z-Y-X欧拉角。得到的末端姿态矩阵为:
(3)
式中:di—支架系统上各个杆件长度(为定位系统设计参数的固定值),i=1,2,3,4,5。
3 机构仿真分析
3.1 静力学仿真
在设计图中的定位系统结构图中可知,该设计中头弓这个零件起着关键性的作用,该部分头弓固定在头环一侧,要承受导板架和导板的所有重量,所以可把此部分视为最薄弱环节。其结构受力状况简化为悬臂梁模型。因此为了保证在使用过程中该部分的变形量可控,本研究对头弓的受力状态和形变状态进行了有限元分析。
本研究在ABAQUS软件中进行了有限元分析,得出应力和应变图如图(3,4)所示。

图3 应力图

图4 应变图
根据材料的轻便性和生物相容性等需求,在实际的临床使用中定位支架订做材料可选用钛六铝四钒,弹性模量为113 GPa,泊松比为0.3,密度为4.428 g/cm3。对其进行承载力分析可知,在顶端螺孔连接处要承受导板架和导板的质量,根据实际需要得出最大载荷不超过10 N。从上图中可以看出最大应力值为4.412e+01 N/m2,最大应变为4.315e-04 mm,均小于材料的许用应力和应变。由此可见,该头弓满足应有的强度和应变需求。
3.2 工作空间仿真
根据正运动学分析的末端姿态矩阵,笔者对颌面外科定位支架末端执行器(即导板架)进行工作空间仿真。仿真结果为定位支架系统工作的空间,如图5所示。
本研究可以覆盖约为200×250×400 mm3的立体空间。在实际临床应用中,固定支架定位系统在整个患病区域一侧的头部,完全满足实际手术的运动空间需求。
在Matlab中仿真图为立体点云模型,为了更直观地展示定位支架末端导板架的工作空间,工作空间的三视图如图6所示。

图5 定位系统工作空间仿真图

图6 立体定位系统工作空间三视图
当定位系统固定在颌面部左侧区域时工作空间符合实际操作部位的需求。
3.3 实验结果分析
定位系统误差测试实验平台中,支架固定在一个3D打印的头骨模型上,所用定位支架为该实验装置。在实验时可以调节定位系统的导板架,从而让导板架上3个特征点与理想位置的特征点进行匹配。
导板定位系统和头骨模型如图7所示。
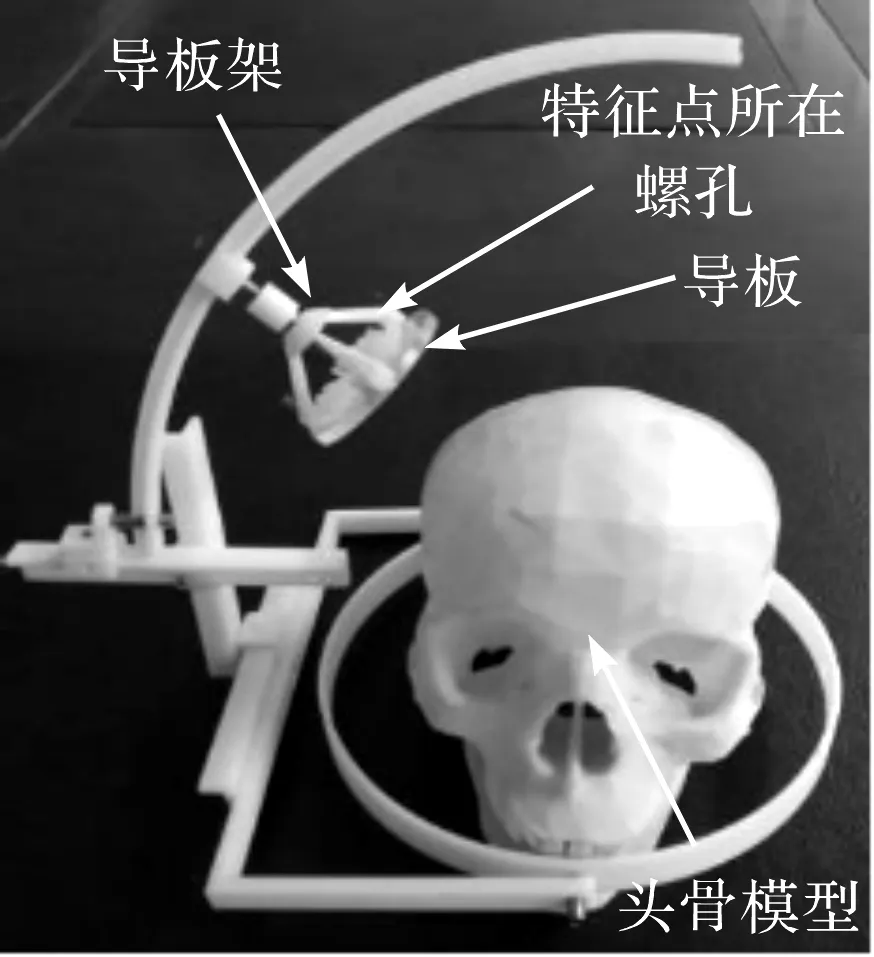
图7 导板定位系统和头骨模型
验证数字化定位系统的定位精度主要是验证其绝对定位精度,绝对定位精度是指支架系统末端执行机构的实际到达位置和理论位置之间的差值。本文选取的精度验证方法是三点对齐法,因三点对齐法原理简单,仅需要通过3个点对在同一坐标系中的坐标关系,即可以快速求出误差,即在已知的对应3个点对中直接采用点到点的欧氏距离,其算法如下:
(4)
式中:(x1,y1,z1)—规划的理论位置上点的坐标;(x2,y2,z2)—实际移动到的位置上点的坐标。
实验中先确定定位系统中导板的初始位姿,然后求出导板在定位系统上到达理想位置应该进行的平移和旋转量,最后通过定位系统调节导板,最终调节后的位置和理想位置必然存在一定的误差。通过统计得出3组实验分别选取的3个点的距离误差如图8所示。
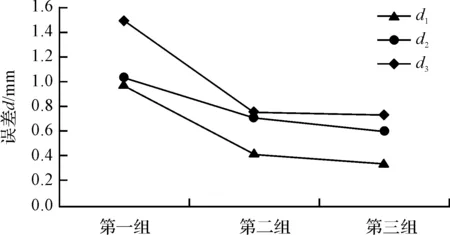
图8 3组实验误差结果统计d1,d2,d3—表示每一组中选取的3个点对的欧氏距离
任意特征点实际绝对误差的最大值可以直观地由以上折线图反映出来,偏差最大值均小于实际导板偏离理论值需要达到2.0 mm以内的需求[13]。所以该数字化导板定位系统可以辅助介入治疗进行精确定位,比以往的颌面部定位系统精度有所提高。
4 结束语
本研究根据颅颌面介入手术导板定位的实际需求,利用D-H参数法进行运动学建模分析,结合六自由度数字化导板定位系统的零部件和关节参数建立了正运动学模型,得出定位系统末端在空间中的位置,并且通过Matlab对该定位系统进行空间仿真得出工作空间范围是200×250×400 mm3,该范围满足实际手术要求的工作空间。最后搭建了模拟实际手术操作的实验平台,对该定位系统的精度进行了验证,得到的误差最大值为1.5 mm,小于目前普遍使用的辅助定位系统的误差2.0 mm。该定位系统的设计可进一步应用于临床。
在下一阶段,本研究将进行动物学实验来进一步验证该定位系统的可靠性,进一步优化定位系统的设计和定位策略,减少实验误差。
猜你喜欢
四川冶金(2021年6期)2021-02-15
精准医学杂志(2020年5期)2020-10-28
河北省科学院学报(2020年1期)2020-05-25
锻造与冲压(2020年5期)2020-03-18
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
海军航空大学学报(2015年1期)2015-11-11
中国医疗美容(2015年1期)2015-07-12
中国医疗美容(2015年4期)2015-04-27
中国医疗美容(2015年5期)2015-02-03
