空间太阳能电站分级分体式控制方式初探
2019-01-03 03:09刘宇飞张兴华邬树楠
宇航计测技术 2018年5期
刘宇飞 王 立 周 璐 张兴华 邬树楠
(1.钱学森空间技术实验室,北京100094;2.大连理工大学,辽宁大连116024)
1 引 言
1968年,美国科学家Peter Glaser首先提出建设空间太阳能电站的构想[1],即将超大型的太阳能电池阵组装放置在地球轨道上收集太阳能并转化成电能,然后利用微波或其它无线技术传输到地球表面。自这一概念提出以来,空间太阳能电站受到了美国、日本和欧洲等一些政府和研究机构的极大关注。我国也将其作为今后的一项重要太空计划[2,3]。空间太阳能电站的结构尺寸巨大,包含多个执行特定任务的载荷。它是通过多次的展开与组装而构成具有一定几何形状的空间系统,然后根据实际任务需求在轨工作。
2014年,第499次国家香山科学会议以“空间太阳能电站发展的机遇与挑战”为主题,对我国开展空间太阳能电站研究的必要性、可行性及技术路线和政策提出了具体意见。2017年,在中国空间技术研究院主办的第二届空间太阳能电站发展技术研讨会上,太空发电站论证专家组建议我国“2030年建设兆瓦级空间太阳能试验电站,2050年前具备建设百万千瓦级商业空间太阳能电站的能力”。目前,分别由中国空间技术研究院和西安电子科技大学研究团队提出的多旋转关节式空间太阳能电站和OMEGA式空间太阳能电站是我国提出的具有一定代表性的概念和方案,如图 1 所示[4,5]。
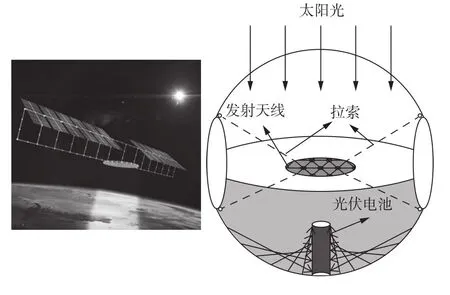
图1 多旋转关节式与OMEGA式空间太阳能电站Fig.1 The multi-rotation joint type and OMEGA type SSPS
当前,国内外学者针对空间太阳能电站的在轨动力学、姿态与振动控制问题开展了初步的研究。Mankins提出空间太阳能电站可采用三轴稳定的控制方式以实现连续对日指向[6]。Straub与Bergsrud提出了空间太阳能电站控制系统的设计准则,并基于此准则设计了姿态控制算法[7,8]。McNally 和Radice等在Wie研究的基础上,分析了位于不同轨道的太阳能发电卫星对日指向控制的结果[9]。吴志刚和邬树楠等考虑了时变重力梯度等多种摄动对Abacus式空间太阳能电站姿态运动的影响,提出了对日指向的鲁棒时变最优控制器[10]。上述姿态控制研究都认为空间太阳能电站是超大型的刚体。
周荻等指出空间太阳能电站这类超大型空间结构,其结构振动很容易被激起且很难自行衰减[11]。邓子辰等针对多旋转关节式空间太阳能电站设计了迭代学习控制器以执行高精度的对日和对地指向协同控制[12]。张景瑞和张尧等建立了空间超大型平板结构的轨道、姿态与结构振动的耦合动力学模型[13]。刘宇飞与侯欣宾等建立了多旋转关节式空间太阳能电站的多柔体动力学模型,设计了以电推力器为执行机构的姿态反馈控制器,并给出了电推力器的配置方案[14]。Donatiello针对柔性Abacus式空间太阳能电站设计了输出反馈次优振动控制器[15]。此外,国内外学者还针对太阳帆航天器、智能桁架等其它大型空间结构姿态与振动控制开展了研究工作。
目前,国内外对于空间太阳能电站的动力学与控制问题的研究仍处于探索阶段。空间太阳能电站一直受到多种空间摄动的影响,如重力梯度、太阳光压以及进出地球阴影导致的周期性热激励等,必然导致低频结构振动的产生。同时对于超大尺寸的空间太阳能电站而言,模块化的同一类执行机构协同工作来完成一体化控制是必然的设计思路。多执行机构/传感器分布式配置的方式也使得传统的集中式控制已经不再适用。因此从新的角度、并采用新的方法研究空间太阳能电站振动控制与姿态稳定控制问题是十分必要的。必须结合空间太阳能电站本身的结构和任务特点,提出创新结构设计理念和创新控制思想。本文讨论的分级分体式控制思路就是在这一背景下的初步探索。
2 兆瓦级(MW)空间太阳能电站结构
MW级空间太阳能电站的任务目标是在前期地面关键技术、空间超高压发电输电、百米级空间组装天线等三阶段技术试验的基础上,实现GEO轨道太空发电站全系统试验验证,同时为GW级电站的建设奠定基础。MW级电站的主要技术指标见表1。
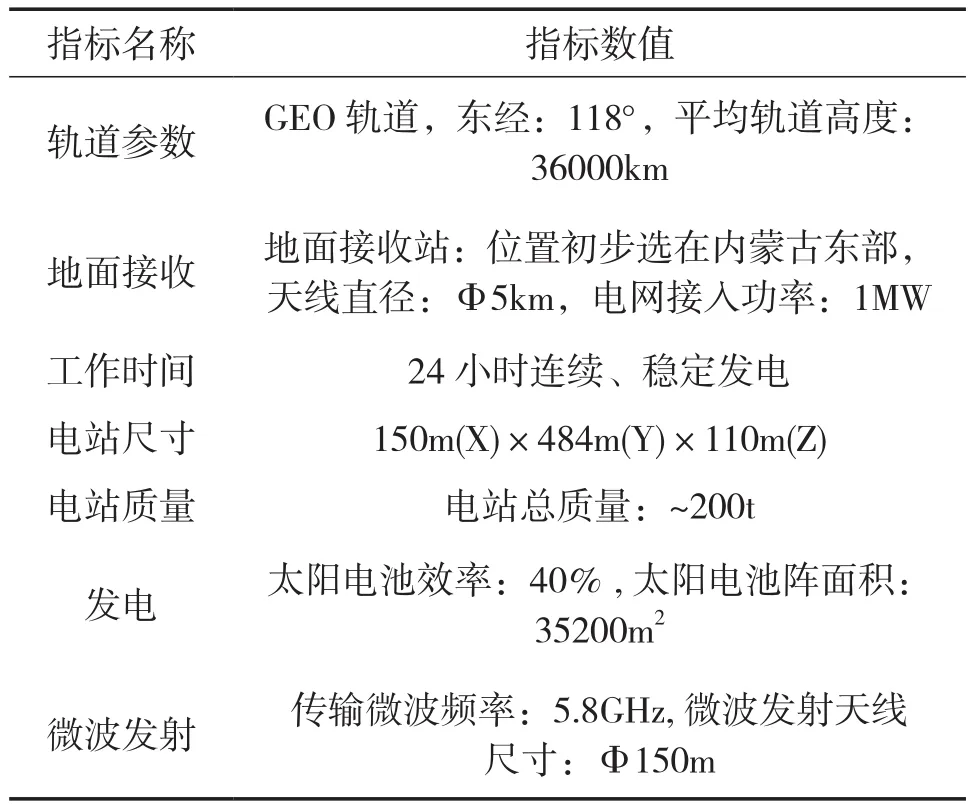
表1 MW级电站系统主要参数Tab.1 Parameters of the MW level SSPS
电站主要包括发电分系统、微波发射分系统、结构控制分系统、电力传输与管理分系统,结构方案在图1设计的基础上,又增加了新的变化,如图2所示。

图2 多旋转关节式空间太阳能电站示意图Fig.2 The multi-rotation joint SSPS and the subsystem
电站从结构方面主要分为三大部分,发电阵、中心桁架和微波发射天线,三部分通过中心桁架和各类接口拼接而成。每个太阳电池子阵端部与主结构连接处有2个独立的导电旋转关节,实现太阳电池子阵与主结构的相对转动。完整的系统组成如图3所示。MW级多旋转关节空间太阳能电站由中心桁架连接电池阵和天线阵。中心桁架上可以布设姿轨控设备。连接导电旋转关节的主桁架上也可以布设姿轨控设备。
3 超大尺度空间系统面临的控制挑战
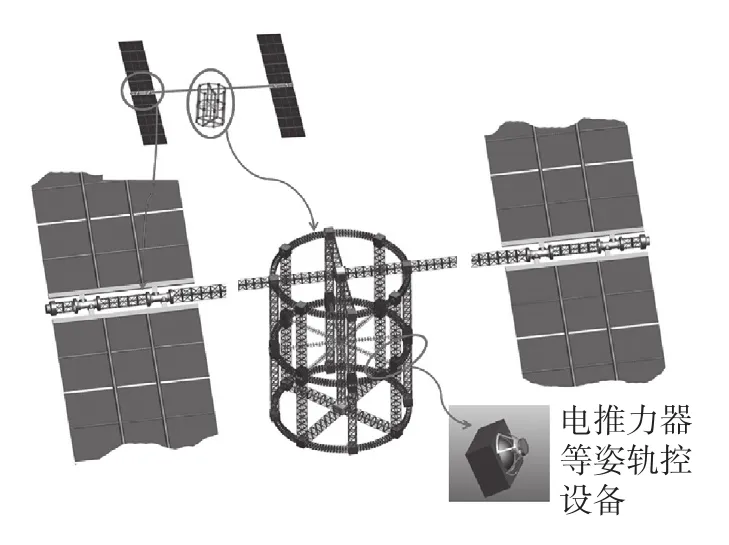
图3 中心桁架和主结构细节示意图Fig.3 The details of central trusses and the main structures
大连理工大学超大尺度空间系统团队针对空间太阳能电站带来的动力学新现象与新问题进行了深入研究。以千米量级的哑铃模型为研究对象,考虑重力梯度影响,建立了Hamilton体系下的在轨动力学模型,利用辛龙格库塔法得到了不同参数取值下的动力学响应[16]。通过对比仿真结果,得到了结构尺寸与重力梯度对轨道运动、姿态运动影响的定量关系。重点讨论了姿态-柔性振动耦合现象,包括姿态运动对结构振动曲线外部包络线样式的作用方式,以及柔性振动对姿态运动周期的改变,如图4所示。
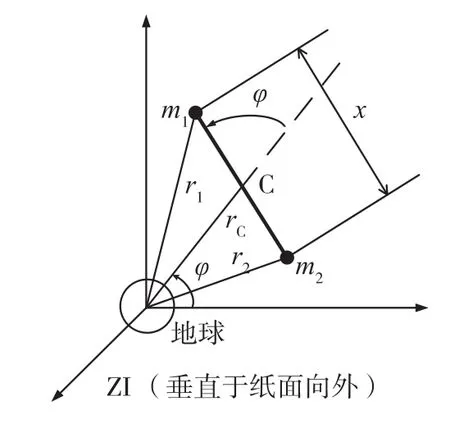
图4 一维哑铃模型示意图Fig.4 Model of one-dimensional dumbbell
仿真结果表明:1)重力梯度对结构的轨道运动影响较小,但随着结构尺寸的增加,重力梯度影响的量级按结构尺寸的平方量级增长;2)重力梯度力矩对姿态动力学影响显著,重力梯度力矩与结构尺寸的平方成正比;3)重力梯度使结构振动与姿态运动产生耦合,姿态运动会影响结构振动的模式,而结构振动则使得姿态运动周期增大,并且结构振动使结构姿态运动更易于翻滚;4)小偏心率轨道下的结果与圆轨道的结果基本一致,但响应特性更加复杂。
在轨装配过程中,频繁的碰撞冲击也对大尺度结构带来了特殊的影响。以100m一根的欧拉梁的组装为例,通过16根同样材质的细长梁组装过程中的轴向振动的仿真,对这一问题进行了初步的描述。
以匀质碳纤维杆为例,仿真参数包括:截面积0.01m2,共进行16根杆的组装,碰撞15次,每次碰撞的时间间隔为100s,碰撞力为40N,碰撞过程持续时间0.1s,每次碰撞的初始条件均由上一次振动方程实时计算得到。第1根、第3根和第9根杆的轴向振幅如图5所示。
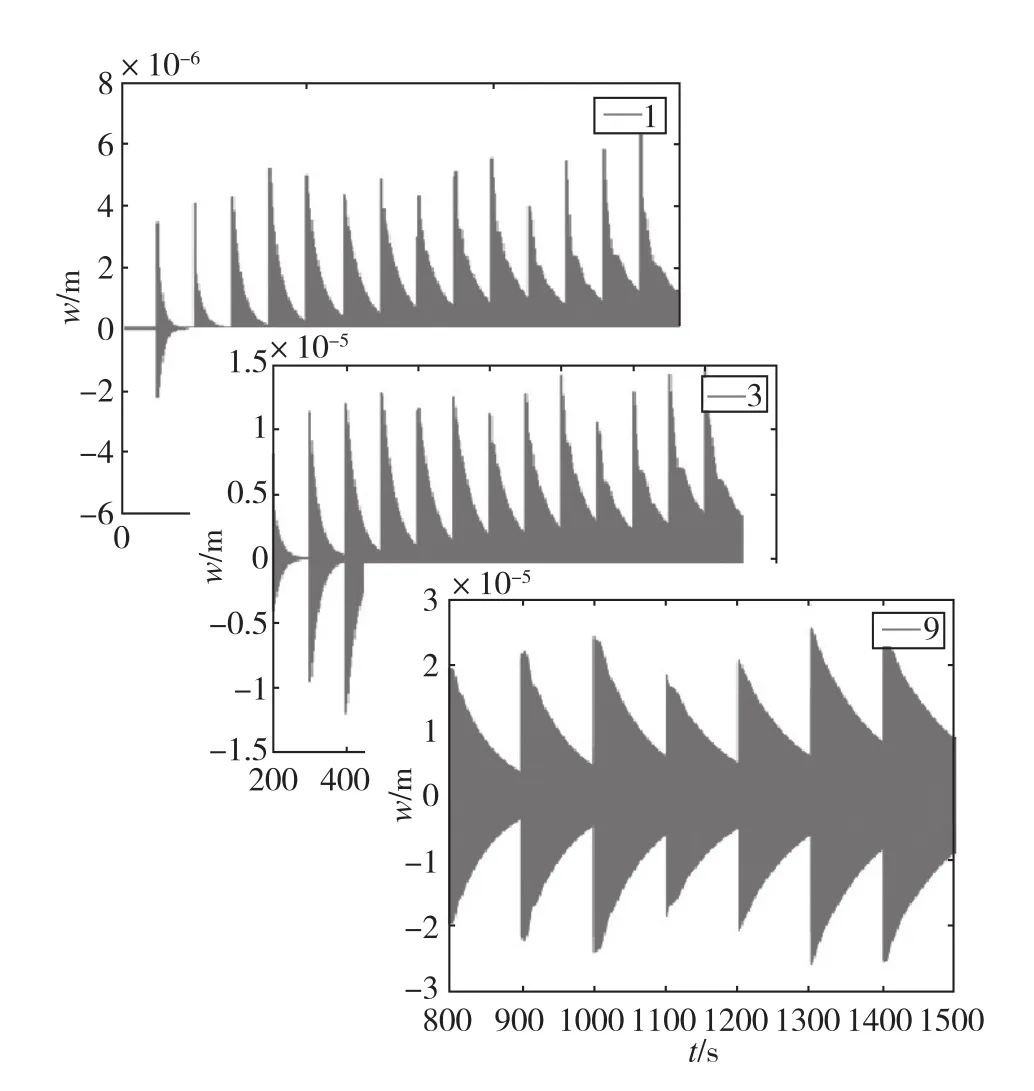
图5 柔性细长杆多次碰撞后的轴向振动振幅Fig.5 The axial vibration amplitude of the thin flexible beams during the assembly
通过多次仿真发现如下现象:前3根杆的振幅在逐渐增大,其他杆的振幅以增大的趋势为主,也有减小的情况。基本上越是后面组装的杆,振幅越大。两次碰撞不同时间间隔对振幅大小有影响,并且总会出现振幅明显变化的情况。截面积、材料、撞击力3个参数的改变并未改变上述现象,暂时未发现共振情况。
4 空间太阳能电站的控制需求
空间太阳能电站的姿态控制需求主要体现在电池阵对日定向和天线阵对地定向。
一般而言,对日定向姿态精度要求较低,由于电池阵面积存在冗余,轻微的误差并不会带来明显影响。但是为了确保地面对能量的安全接收,天线阵对地定向要求较高,同时为了提升能量传输效率,形面精度同样要求较高。经分析,对于天线阵而言,单个模块为边长2.4m的方形结构,整体旋转角度的RMS:0.1度,局部形变的RMS为1.2mm,波束指向精度要求优于0.0027度。
为了满足上述需求,初步设计的控制方式是电池阵对日定向利用电机驱动,利用反作用轮/动量轮抵消角动量。反作用轮/动量轮指标如下:输出力矩(0.01~1)Nm,质量(2~20)kg,待机时功率(10~20)W,工作时功率(50~110)W。最终选定共需0.025Nm的动量轮16个,质量约40kg。天线阵对地定向、轨道保持利用电推进器实现。电推进功率(1~10)kW,离子推力器推力(40~100)mN,比冲3000s,共需30~50个;按照质量分布,每个电池子阵携带1个,共16个,天线阵20个。15年寿命期内每个电推进器携带燃料120kg。
通过第3节的分析,空间太阳能电站由于大尺度的特性,面临的更大问题在于细长杆结构、薄膜结构带来的振动。由于控制执行机构在模块化设计思路基础上,要求尽可能的一致,并且分布式布设。因此如何通过少数的几类敏感器和执行机构实现差异化的控制,如何通过分散式的执行机构实现姿态轨道振动的控制,如何确保低控制精度的太阳电池阵在控制过程中不会将其影响传递到高控制精度的天线阵等问题是空间太阳能电站新出现的控制需求。
为了保证大尺度天线阵的高精度指向和形面稳定,就需要采取相应办法对这些微小扰动进行相应的隔离。目前,国内外在卫星微振这个问题上主要还是采取被动方式的隔振技术,并且取得了一定的成果。被动隔振虽然对高频模态具有较好的隔离效果,但是对低频振动模态仍然不能满足要求。而空间太阳能电站大尺度柔性结构带来的振动主要以低频振动为主。为此需要采取新型的主动隔振技术从结构上将空间太阳能电站的天线阵和电池阵分离开来。其中,将空间太阳能电站上的活动部件安装到中心桁架上,将电池阵带来的扰动源与天线阵从物理结构上完全的隔离开来,根本的阻断了振动传递的直接途径。再通过设计相应的控制规律以有效的抑制振动在力学途径上的传递,最终获得良好的振动隔离效果,从而使天线阵获得超静的工作环境,仅需完成自身的缓慢运动条件下的姿态控制即可。
物理隔离的可行性在于天线阵与主体结构之间除了电力传输外,不需要有任何连接,物理隔离后各自的控制可以由自带的执行机构和敏感器来实现。可以采用的方式包括:利用新的智能材料以及中心桁架较长的尺度,对低频振动的能量进行吸收耗散;仅利用柔性电缆连接,通过导电旋转关节实现电缆的旋转;通过由音圈电机改进而成的力执行器实现电磁连接,它的永磁铁芯部分安装在天线阵上,线圈安装在主体结构部分,力执行器能够沿着一个轴的方向给出可控的电磁力,始终保持模块之间的相对位置及姿态。
5 分级分体式控制设想
依托空间太阳能电站对姿态、轨道、振动控制的需求,结合电池阵与天线阵物理隔离的思路,提出了一种分级分体式控制的设想。分级是指电池阵和天线阵分别属于不同的控制精度级别,不需要采用同样的控制方式。分体是指为了避免电池阵结构振动对天线阵的高精度控制产生影响,从而采用的物理隔离方式。
分级分体式控制设想结合了多种已有控制方式的特点,包括考虑执行机构和敏感器分散式布设的分布式控制方法;执行机构布设冗余,多种组合方式均能实现控制目标的情况下,借鉴多操纵面控制及控制分配方法来实现燃料最优、结构振动最小等目标;无论是大尺度的天线阵还是电池阵,都需要利用带有活动部件的多体航天器姿态控制方法实现姿态控制,同时还需要考虑如何利用环境力矩来减少燃料消耗。下面分别分析分级分体式空间太阳能电站在每个控制方法中的适用范围。
5.1 分级分体式控制方式中的分布式控制
分布式控制是以实现全系统的整体性能指标为目标,通过系统结构分解方法将大型系统分解成若干相互关联的子系统;利用各子系统自身的动态特性及其与相邻系统的协作关系,以每个子系统为对象设计基本控制器,最后通过大量基本控制器的协同工作实现整体系统的控制[17]。目前,大型空间结构的分布式控制得到了国内外学术界和工业部门的关注。Turner和Chun研究了挠性航天器大角度姿态机动的分布式最优控制问题,在所设计的控制系统中包含一个安装在中心刚体上的主控制器和四个安装在挠性附件上的从控制器[18]。Balas指出具有较大尺寸的空间结构属于分布式系统,对于高精度指向控制或型面调整可采用分布式的控制方法[19]。吴志刚和邬树楠等也提出了柔性Abacus式空间太阳能电站对日指向的分布式鲁棒共位控制方法。
在分布式控制中,各控制器并行工作完成预定的功能,这种方式可有效减弱对单一控制器输出与计算能力的要求,提高计算效率与反馈速度。此外,系统局部故障不会对整体控制性能造成很大影响,具备良好的鲁棒性。这种性质对于工作周期很长、运行环境复杂的空间太阳能电站来讲尤为重要。
5.2 分级分体式控制方式中的多操纵面控制及控制分配
多操纵面控制系统是一种过驱动系统(Over Actuated System),为了实现相同的力矩控制,多个执行机构存在多种不同组合方式。由于在实际情况中,空间太阳能电站的各个执行机构均受到物理位置限制和响应速度限制,因此在数学上空间太阳能电站多操纵面的分配问题可以描述为一种包含约束条件的过驱动系统受限分配问题。多操纵面的控制分配问题在本质上是一个多目标优化问题,空间太阳能电站对于空间环境扰动、燃料消耗、振动情况、姿态精度等的要求使得操纵面的分配与管理呈现多目标化。同时多操纵面控制分配技术为系统重构控制提供了新的设计方案与解决途径[20]。
基于多操纵面控制的重构控制设计可适当减少执行机构的硬件余度配置,减少重量和成本,简化姿态轨道控制系统设计的复杂度,提高系统可靠性。多操纵面为空间太阳能电站控制提供了冗余的控制思路,多操纵面控制分配技术有利于实现振动减缓和振动抑制,能提高算法的分配效率、增强算法的鲁棒性等。振动减缓实质上就是基于多操纵面的直接力控制在环境扰动运动中的一种应用,它通过对多操纵面的协调控制和管理产生大小相等、方向相反的外力来抵消环境扰动引起的结构振动。这一思路可以应用于空间太阳能电站低频振动的减振隔振任务中。
5.3 分级分体式控制方式中带有活动部件的多体航天器姿态控制
无论是空间太阳能电站的电池阵还是天线阵都可以简化为带有活动部件的多体航天器姿态动力学系统,其一般模型由一组微分方程描述,其中包括表示航天器中心刚体的转动动力学方程,表示活动部件的转动动力学方程,表示活动部件的振动动力学方程,以及表示航天器运动的运动学方程。
在解决上述控制问题时面临的主要问题是:1)非线性、高维数。该动力学系统是一个非线性多变量复杂系统,各部分耦合运动引起动力学方程的非线性;并且由于上述动力学系统的状态变量由诸多向量构成,系统的状态维数很大。这都将增大控制器设计和闭环系统稳定性分析的难度;2)耦合作用参数的不确定性。由于安装误差或者结构相对位移的发生,该动力学系统中的耦合作用矩阵一般难以在动力学建模中精确获得,或者存在时变特性,其参数的变换或不确定性将会对航天器姿态控制的精度产生不可避免的影响。如何设计合理的姿态控制器使得闭环系统对上述参数的不确定性具有鲁棒性,是关键问题[21]。
6 结束语
通过对空间太阳能电站结构和功能需求的分析,给出了执行机构和敏感器分散布局,各分系统控制精度要求不一致,天线阵需要隔离电池阵和其他结构带来的柔性振动等约束条件下的控制需求。
针对超大尺度空间结构在空间中的振动情况进行了仿真分析。结合上述特点在借鉴分布式控制、多操纵面控制以及带活动部件的多体航天器姿态控制等先进控制方法基础上,提出了分级分体式控制设想。将太阳电池阵和天线阵利用中心桁架进行物理隔离,从而实现最优燃料消耗的电池阵控制,以及在超静平台运行的天线阵的形面保持和振动抑制。分布式控制方法、带活动部件的多体姿态控制主要用于电池阵、天线阵系统的控制中。多操纵面控制主要通过多目标优化下的控制分配技术来实现减振隔振。分级的目的是降低燃料消耗,分体的目的是隔离振动。当然如果能巧妙的利用各个执行机构、并借助空间摄动来实现振动控制和姿态稳定控制,将会极大地提高空间太阳能电站的经济性能和可行性。
未来将通过详细的建模仿真工作验证所提出的分级分体式控制设想的可行性。为无中心刚体的大型柔性分级分体结构控制提供技术支持。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
能源工程(2022年2期)2022-05-23
中国典型病例大全(2022年12期)2022-05-13
今日自动化(2021年4期)2021-07-21
汽车观察(2021年4期)2021-05-10
汽车维修与保养(2020年11期)2020-11-23
人人健康(2019年1期)2019-01-10
中国高新技术企业(2015年17期)2015-05-18