
基于三维激光扫描技术的建筑物立面测绘及成果精度评定
2019-01-03 09:07龚良雄赵兴友朱锋博
城市勘测 2018年6期
龚良雄,赵兴友,朱锋博
(1.南昌市测绘勘察研究院,江西 南昌 330013; 2.武汉大学遥感信息工程学院,湖北 武汉 430079)
1 引 言
传统建筑物立面测量方法主要依靠作业人员利用皮尺、测距仪等原始测量仪器,对测区范围内建筑物立面尺寸进行数据采集,测量方法存在以下几方面的不足:①人工作业成本较大;②作业方式不灵活、效率低;③外业工作量大、耗时长,使得立面测量外业工作不能顺利开展。
随着科学技术的发展,三维激光扫描技术的出现使得人们可以对复杂的空间环境以及物体进行三维扫描,可以直接获取各种复杂、不规则、大型、不可接触的物体或者环境三维空间数据,进而快速地构建出目标物体的三维模型以及其他各种矢量制图数据[1~3],广泛地应用于测绘、虚拟仿真、逆向工程等不同的领域。为此,本文探讨了将地面三维激光扫描技术运用到建筑物立面测绘项目中,阐述了具体的作业流程,绘制了建筑物立面图,同时对立面图精度进行评定,结果表明:地面激光扫描立面测绘成果精度符合规范要求。
2 地面三维激光扫描立面测绘流程
如图1所示,为地面三维激光扫描建筑物立面测绘流程技术流程。
技术流程主要分为三个阶段:①数据采集准备阶段;②数据采集、处理阶段;③精度评定。数据采集准备阶段的主要工作是实地踏勘、资料收集以及制定相应的工作技术方案。数据采集包括建筑物点云与影像数据采集,数据处理包括影像与点云配准,扫描站点间点云相互配准,然后利用全站仪采集适量的同名点数据,同名点选取需要考虑点位数量以及点位布设位置,尽量均匀分布整个测区。将相对坐标系变换到相应的城市独立坐标系当中,最后进行立面图绘制。精度评定阶段主要对刚体变换后点云平面位置及高程精度进行评定,并以此判定立面测绘成果是否可靠、是否满足规范要求。

图1 地面三维激光扫描立面测绘流程技术流程
3 工程实践与成果精度评定
受南昌市新建区城市投资发展有限公司委托,于2017年9月22日开始对南昌市新建区长征路(乌石桥-陆军学院)提升改造工程建筑物立面测量工作,测区包括长征东路、长征西路以及与长征路所交叉部分道路,测区东西向全长约 4.539 km,宽约 33 m~39 m,建筑物立面测量主要对建筑物立面的窗户、空调罩、真石漆、涂料、店招等进行测量,并绘制建筑物立面示意图。
3.1 数据采集
数据采集之前应进行实地勘察、制定扫描方案、检查仪器等工作,在地面激光扫描仪接通电源之后,按下仪器的开机键,在进入扫描屏幕之前仪器会自动进行预热和自检,之后用户可以在扫描参数设置界面中设置扫描参数,设置参数之后,扫描仪自动采集点云和影像数据。对于遮挡或漏测建筑物,可采取针对性的补扫方式。在扫描仪采集数据的同时,利用全站仪极坐标法获取建筑物同名点坐标,以便进行刚体变换,并采集适当数量的同名点,评定点云数据精度。现场数据采集如图2所示。

图2 现场数据采集
3.2 点云数据处理
数据处理采用仪器配套的JRC Reconstructor软件,通过导入所采集的外业数据(*.zfs),软件可实现去噪、无标靶拼接、精拼接等一系列自动操作,点云配准采用迭代最近点算法(ICP)。配准后的点云数据质量较大程度上依赖于专业技术人员的数据处理经验和专业知识[4],配准采用人机交互方式进行,粗配准利用软件自动配准,作业人员根据配准结果,若配准精度较高,直接利用软件配准结果,若配准精度达不到项目要求,选取适量的同名特征点以便重新配准。根据项目要求,配准误差控制在 1 cm以内即可满足。长征路全长约为 4.6 km,点云数据量巨大,若全部点云进行配准耗时很长,因此将获取的长征路点云数据分为三个标段分别进行点云数据配准,同时减小了配准误差的累积。三个标段点云配准精度如表1所示。应委托方要求,还需将点云数据的扫描仪坐标系转换为地理坐标系,因此还需将点云数据进行刚体变换,利用全站仪获取的同名点数据,进行刚体变换,配准以及刚体变换后点云如图3所示。

点云配准精度表 表1

图3 点云局部效果图
3.3 立面图绘制
点云数据处理完成后,可进行立面图的测制。本文采用二维模式下平面投影测制立面方法,大致原理是将点云模型通过相关软件的投影功能进行平面投影处理,从而得到投影后的平面点云数据,然后在平面点云数据上绘制立面图形。具体方法是利用配准及刚体变换后的整体染色点云,使用Recap 360软件将原始染色点云数据格式转换为*.rcp格式,在AutoCAD 2014中通过设置相应的用户坐标系(UCS),进行线划图绘制并制定比例。建筑物立面效果图对比如图4所示。
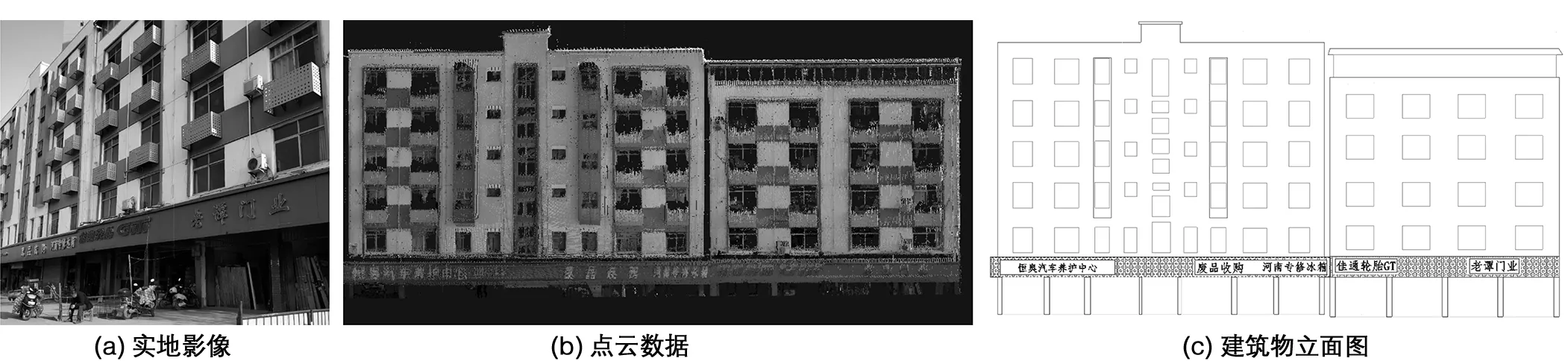
图4建筑物立面效果图对比
3.4 精度评定
建筑物立面图绘制之后,对建筑物立面测绘成果进行了精度评定。由于目前没有相关规范规定立面测绘成果平面位置及高程精度,因此参考工程测量规范,点云平面精度及高程精度如表2所示。

点云中误差 表2
注:此表来源于《工程测量规范》中5.1.5-3表
选取长征路均匀分布的9个检查点评定点云数学精度,平面及高程精度分析表如表3所示。
计算如下:
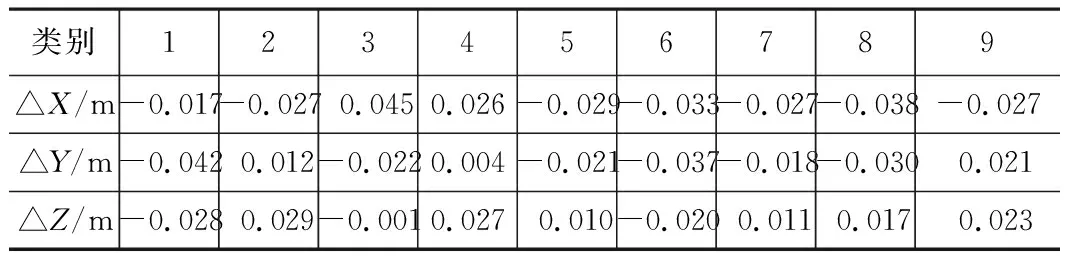
点云平面及高程中误差统计表 表3
平面位置中误差为:

高程中误差为:

由评定结果可知,点云平面位置及高程精度均满足《工程测量规范》要求,证明了本项目建筑物立面测绘成果的可靠性。
4 结 语
本文结合地面三维激光扫描系统特点及优势,将其应用到建筑物立面测绘项目中,并阐述了点云数据处理流程及处理方法,绘制了建筑物立面图,最后对立面测绘成果进行了精度评定,评定结果表明:本项目立面测绘成果符合有关规范要求。与传统测量技术相比,地面三维激光扫描技术外业数据采集效率很高,但其在数据处理方面流程较为烦琐,并且应用成本较高。长征路建筑物立面测量项目共计79栋建筑物,外业采集时间仅用了 5 d,若采用传统测图技术,仅数据采集阶段就耗时很长。
本文结合地面三维激光扫描技术特点及优势,将其应用到建筑物立面测绘项目中,对点云精度进行了精度评定,虽然数据精度方面满足相关规范要求,但该技术手段应用于建筑物立面测绘仍在某些方面存在不足:①如数据采集过程中受其他地物遮挡影响较大;②点云数据量巨大并且数据处理方面效率不高;③数据采集过程中受建筑物层高影响较大,高层建筑物顶部细节不够丰富;④建筑物立面特征提取自动化程度不高,主要依靠人工处理;⑤应用成本较高。但随着地面三维激光扫描技术的不断发展,这些不足将会得到一定程度上的改善。
猜你喜欢
心理学报(2022年4期)2022-04-12
水泵技术(2021年3期)2021-08-14
金桥(2021年7期)2021-07-22
铁道建筑技术(2021年4期)2021-07-21
少先队活动(2021年1期)2021-03-29
黑龙江水利科技(2020年8期)2021-01-21
当代陕西(2019年20期)2019-11-25
小学生学习指导(低年级)(2019年9期)2019-09-25
军营文化天地(2017年6期)2017-06-28
中国惯性技术学报(2015年1期)2015-12-19
