
GeoEye-1卫星无控自主定位和稀疏控制点下定位精度评价研究
2019-01-03 09:07林鸿弟屈利娜
城市勘测 2018年6期
林鸿弟,屈利娜
(湛江市规划勘测设计院,广东 湛江 524002)
1 GeoEye-1卫星及产品
GeoEye-1是美国的一颗商业卫星,该卫星能提供全色 0.41 m分辨率和多光谱 1.65 m分辨率的超高分辨率影像,GeoEye-1是IKONOS的后续卫星,较IKONOS分辨率更高,卫星姿态更灵活,获取能力更强,内外精度更高。
GeoEye-1影像产品系列由3个核心产品组成:Geo、Geoprofessional、Geostereo组成。
2 卫星成像模型
GeoEye-1卫星采用线阵CCD传感器来获取遥感影像,它的传感器信息并不向用户公开,只向用户提供有理函数模型系数。
有理函数模型(Rational Function Model,RFM)是一种广义的新型传感器成像模型,它适用于各种类型的传感器,而且无须使用影像获取过程中的各种成像几何参数,如卫星星历、传感器姿态角及物理特征参数等。另外,RPC(Rational Polynomial Coefficient)参数不具有明确的物理意义,能够很好地实现传感器核心信息的隐藏。
RFM将地面点大地坐标D(Latitude,Longitude,Height)与其对应的像点坐标d(Line,Sample)用比值多项式关联起来。为了增强参数求解的稳定性,将地面坐标和影像坐标正则化为-1~1之间。
(1)
其中:
Numr(P,L,H)=a1+a2L+a3P+a4H+a5LP+a6LH+a7PH+a8L2+a9P2+a10H2+a11PLH+a12L3+a13LP2+a14LH2+a15L2P+a16P3+a17PH2+a18L2H+a19P2H+a20H3
Denr(P,L,H)=b1+b2L+b3P+b4H+b5LP+b6LH+b7PH+b8L2+b9P2+b10H2+b11PLH+b12L3+b13LP2+b14LH2+b15L2P+b16P3+b17PH2+b18L2H+b19P2H+b20H3
Numc(P,L,H)=c1+c2L+c3P+c4H+c5LP+c6LH+c7PH+c8L2+c9P2+c10H2+c11PLH+c12L3+c13LP2+c14LH2+c15L2P+c16P3+c17PH2+c18L2H+c19P2H+c20H3
Denc(P,L,H)=d1+d2L+d3P+d4H+d5LP+d6LH+d7PH+d8L2+d9P2+d10H2+d11PLH+d12L3+d13LP2+d14LH2+d15L2P+d16P3+d17PH2+d18L2H+d19P2H+d20H3
式中,多项式中的系数ai,bi,ci,di成为有理函数的系数。(P,L,H)为正则化的地面坐标,(r,c)为正则化的影像坐标,表达式为:
其中,LAT_OFF,LAT_SCALE,LONG_OFF,LONG_SCALE,HEIGHT_OFF,HEIGHT_SCALE为地面坐标的正则化参数。SAMP_OFF,SAMP_SCALE,LINE_OFF,LINE_SCALE为影像坐标的正则化参数。它们与RFM四个多项式中的80个RPC参数共同保存在卫星厂家提供给用户的RPC文件中。
在GeoEye卫星影像的生产过程中,在得到Geo级别影像的同时,也会生成相对应的RPC文件。这个RPC文件就是这次自主定位精度评价所用的成像模型。
3 自主定位精度评价
3.1 实验数据
中国河南嵩山地区RGB Geo级别影像,获取日期为:2009/4/29,影像名称为:po_339701_rgb_0000000.tif。影像范围大约为:9 km×6 km,影像分辨率为 0.5 m。
利用由武汉大学建设的嵩山摄影测量与遥感定标试验场中已有的控制点成果,选取了36个控制点作为检查点参与本次实验,检查点在GeoEye-1影像中均匀分布。
3.2 自主定位精度评价方法
单景影像无控自主定位精度即卫星影像的直接定位精度,根据RPC模型直接计算检查点的像方坐标,通过检查点的精度来评价卫星影像的定位精度。具体评价方法是首先根据参考影像,在卫星影像上确定检查点的点位,并在影像上量测该点的像平面坐标。然后利用RPC模型将检查点物方坐标投影至像方,得到其像方坐标。根据计算得到的像方坐标与实际量测的像点坐标计算检查点在沿轨和垂轨方向上的坐标差值。精度评价的指标为坐标差的平均值与中误差。
自主定位精度验证流程如图1所示:
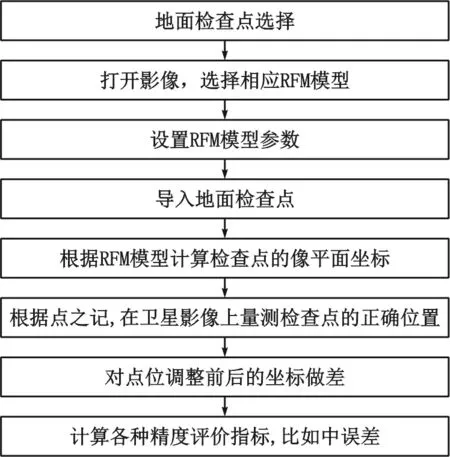
图1 自主定位精度验证流程图
3.3 实验过程
本次实验利用ERDASERDAS软件进行。ERDAS 2010中的几何纠正模块中含有Geoeye-1的有理函数模型,如图2所示:
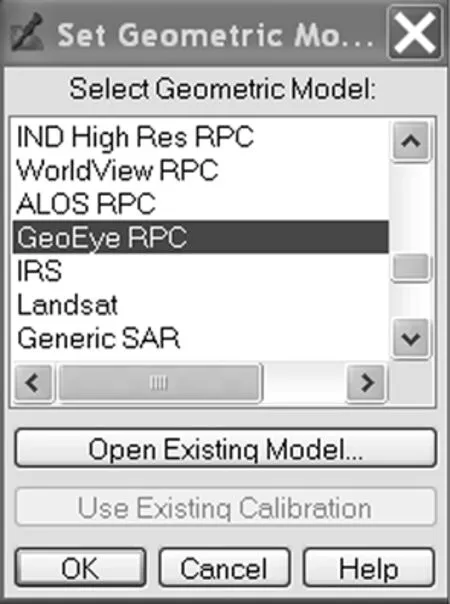
图2 几何纠正模型
GeoEye RPC即是我们此次试验所用的RFM模型。点击OK之后,选择RPC文件、设置坐标系等信息。设置完各种参数之后,导入地面检查点的坐标(B,L,H)。然后通过RFM模型来计算检查点的影像坐标。在ERDAS中,是通过点位预测功能实现的。
根据点之记,得到检查点对应像点的真实坐标,与直接计算预测得到的坐标做差,然后计算各种误差指标进行精度评价。
3.4 结果与分析
根据预测点位位置与点位实际位置来确定直接定位精度,结果如表1所示:
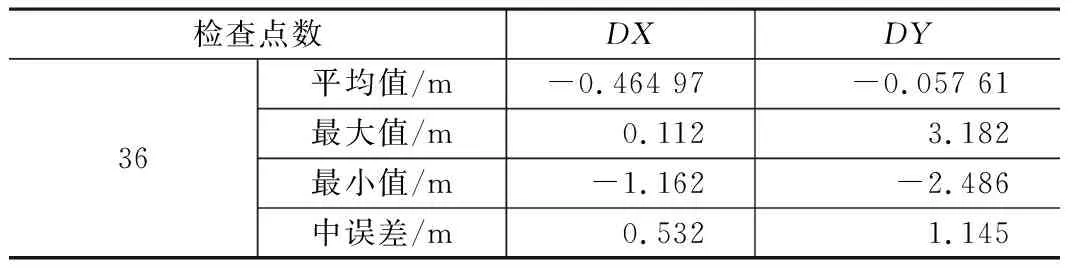
几何定位精度表 表1
通过残差图来更直观地表示,如图3和图4所示:
结论:GeoEye-1卫星Geo级别RGB影像无控制点几何定位精度基本都在 3 m以内,与GeoEye-1官方给出的定位精度 3 m基本一致。虽然Geo级别是GeoEye-1面向用户最基层的产品,但是它经过了一定的几何纠正,这也是它没有控制点定位精度高的原因。另外,通过上图可以发现垂轨方向误差比较稳定,均在 -0.5 m左右,怀疑为系统误差。在下面试验中加入稀疏控制点来补偿系统误差。而沿轨方向误差波动较大,在 ±3 m,应该是由于卫星成像过程中飞行轨迹与传感器运动的随机性导致。
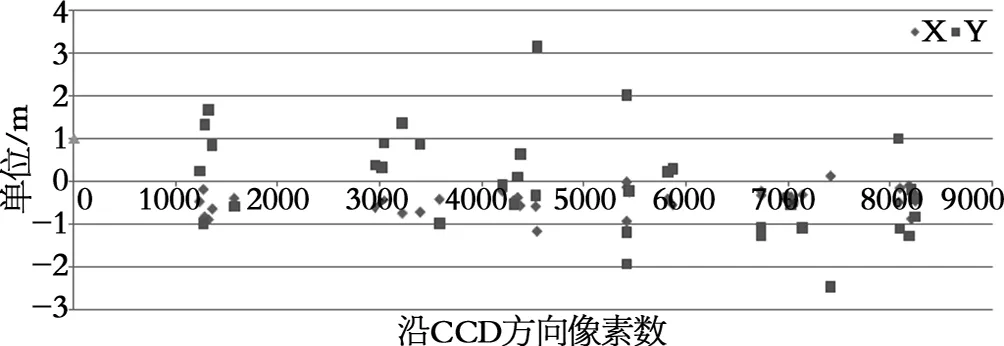
图3 点位残差分布
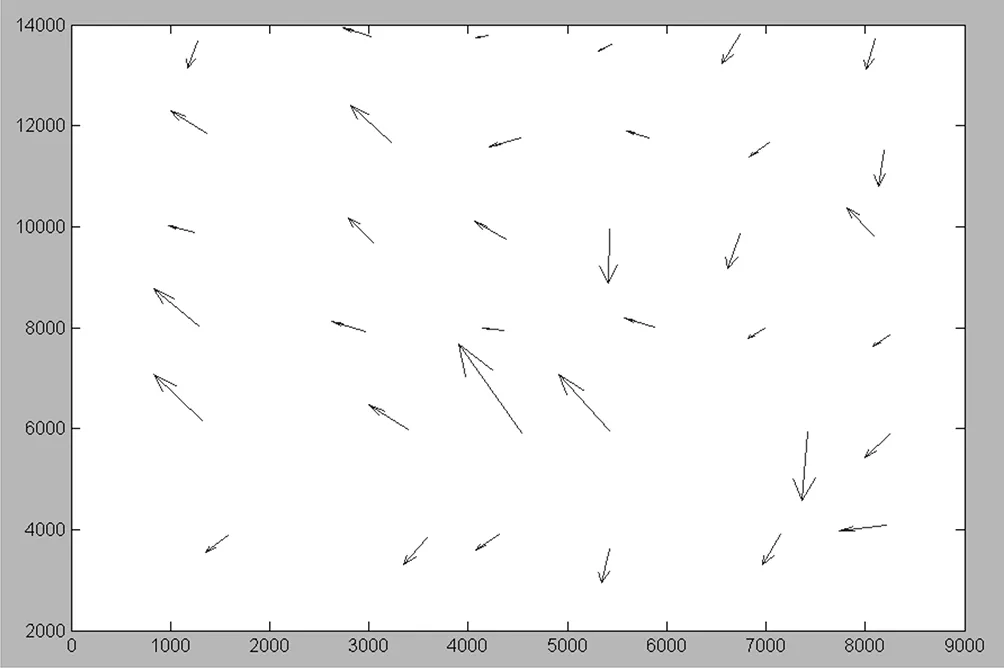
图4 自主定位残差方位图
4 稀疏控制点下定位精度评价
由于严格几何成像模型本身的定位参数是从卫星星历文件以及位置姿态数据得到的,受卫星位置和传感器姿态角观测值中系统误差的影响,严格几何成像模型不可避免地包含有系统误差。而RPC参数是根据严格几何成像模型求出,因此这些系统误差也会保留在RPC参数中。3.3中的实验结果也证实了系统误差的存在。因此我们可以利用地面控制点对系统误差进行补偿,以提高几何定位的精度。
4.1 系统误差补偿模型
将式(1)还原标准化,整理得到:
加入系统误差补偿后,有理函数模型表达式被修正为:
其中R′,C′是控制点在影像上的实际坐标;R,C是地面点坐标(P,L,H)经过RPC模型计算得到的像点坐标;△R,△C为像点坐标R,C的系统误差补偿值,表达式如下:
式中,(e0,e1,e2…f0,f1,f2…)为系统误差补偿参数。根据不同的参数选择,有不同的误差补偿模型。
(1)e0,f0:平移变换模型。此时最少需要一个控制点来解算模型参数。
(2)e0,e1,e2,f0,f1,f2:仿射变换模型。此时最少需要三个控制点才能求解这6个模型参数。
4.2 精度测试
(1)平移变换误差补偿
选择不同个数的控制点计算平移补偿模型参数e0,f0,通过不同数量的控制点来反映控制点数量对定位精度的影响。其余点皆作为检查点来验证平移变化误差模型补偿精度。
分别采用1、2、4、5个控制点来计算。不同个数控制点在影像上分布分别如图5所示:
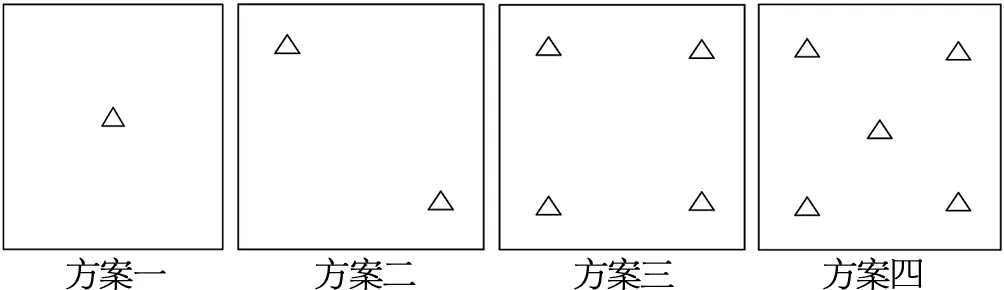
图5 控制点选择方案
实验结果如表2所示:
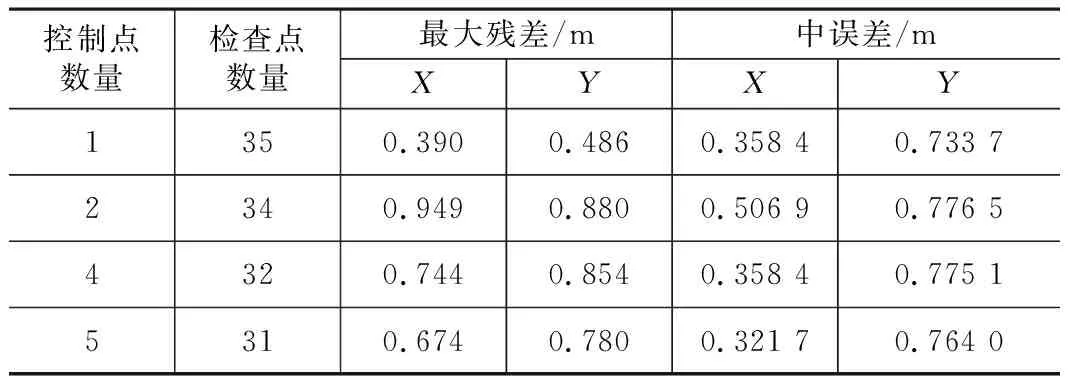
平移误差补偿模型定位精度表 表2
通过上述表格以及与3.4中结果对比分析可以发现,加入平移误差补偿模型可以在一定程度上补偿自主定位系统误差。从表1得到,在不加入任何误差补偿模型时,定位精度在X和Y方向上中误差为0.532和1.145。而此次试验中,加入一个控制点,其定位精度中误差在X和Y方向上分别提高到 0.358 4和 0.733 7,分别提高了32.6%和35.9%。但是随着控制点数量的增加,其定位精度并没有随之提高。分析其原因,推测是由于平移参数只能补偿由于卫星位置和传感器姿态角误差在行列方向上引起的平移误差,而不能补偿由其引起的漂移误差等。
综上所述,得出如下结论:平移误差补偿模型对于补偿自主定位的系统误差是有效的,并且对于GeoEye-1影像来说,仅加入一个控制点,就能达到补偿效果。
下图为一个控制点情况下,检查点的定位精度残差图如图6所示:

图6 定位残差图
比较图4和图6可以发现,加入控制点之后,检查点残差有所下降,但是边缘部分残差却有变大的趋势。分析原因为选择的控制点点位位于整幅影像正中心位置,无法顾及边缘位置影像。
(2)仿射变换误差补偿
由于仿射变换误差模型至少需要3个控制点才能解求6个变换参数e0,e1,e2,f0,f1,f2,因此对于此种误差模型,首先选取4个控制点来参与计算仿射变换误差模型,来探讨控制点不同分布时该误差补偿模型对于最后定位精度的影响。
4个控制点在影像上的不同分布如图7所示:
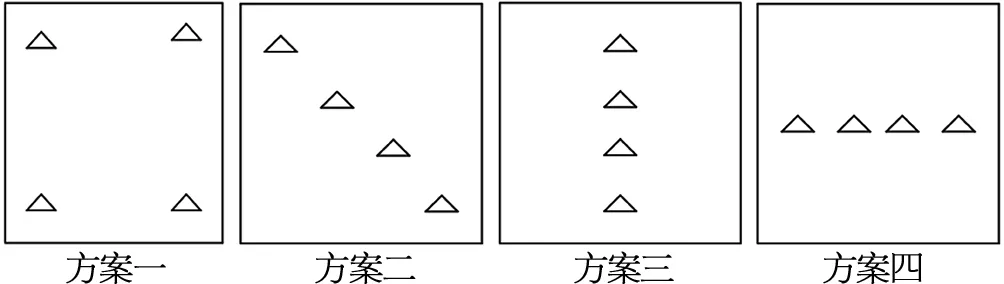
图7 控制点分布图
实验结果如表3所示:
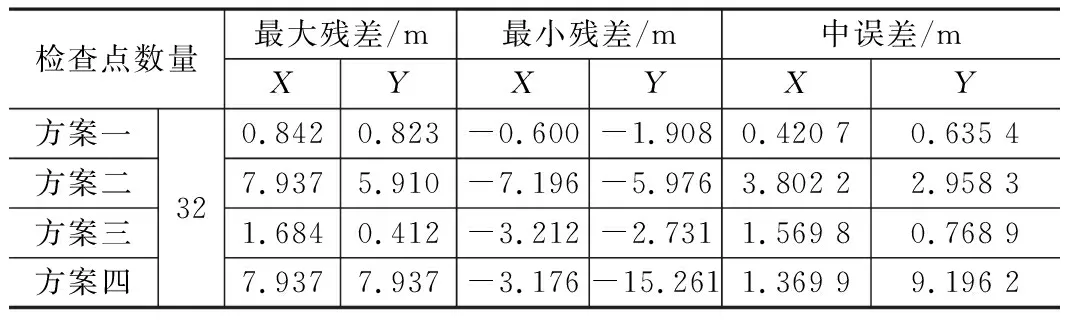
仿射变换补偿模型定位精度表 表3
通过表3我们可以看出,在4种方案中,方案一的布设方案最好,起到了仿射变换的作用,在一定程度补偿了系统误差的影响。其中定位精度中误差在X和Y方向上分别为 0.420 7和 0.635 4。相比于自主定位精度,在X方向上提高了(0.532-0.4207)/0.532=21%,在Y方向上提高了(1.145-0.6354)/1.145=45%。而方案二、方案三、方案四不仅没有提高定位精度,反而降低了定位精度。究其原因,应该是控制点分布不合理导致。因此推荐方案一,也就是控制点布设在影像四角位置。
方案一时,检查点残差分布图如8所示:
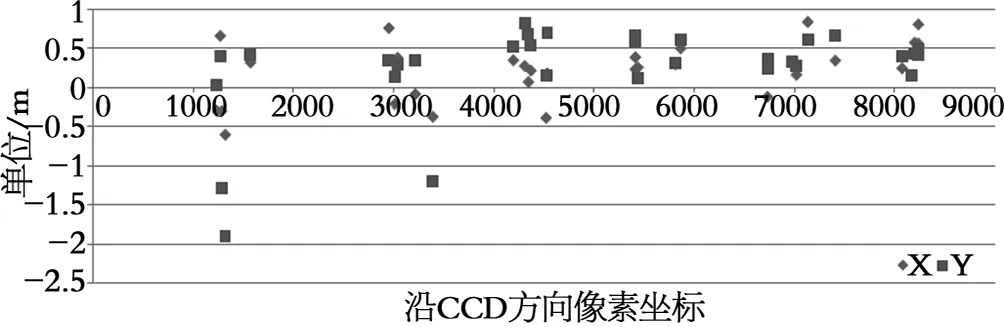
图8 点位残差分布
从图8可以看出,方案一情况下,除了三个检查点在Y方向上存在比较大的残差,其余残差均分布在某个值上下。图3与图8对比更能说明仿射变换误差补偿模型的作用。
接下来验证更多的控制点数量时,比如:6个、8个控制点时的定位精度,是否随着控制点数量的增加,仿射变换误差补偿效果会随之增加。
6个、8个控制点在影像上分布如图9所示:
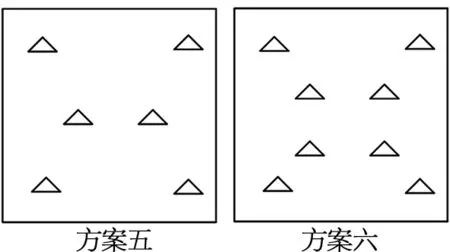
图9 控制点分布图
实验结果如表4所示:
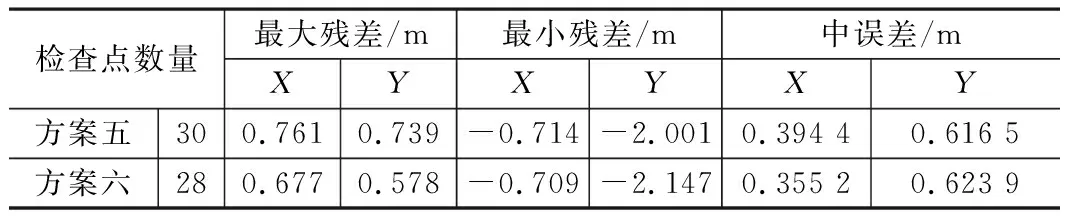
仿射变换补偿模型定位精度表 表4
通过表4我们可以看出,当控制点数量增加至6个、8个时,定位精度中误差相比4个控制点时,有了微小的提升,但基本保持在一个水平。因此得出如下结论:综合考虑GeoEye-1定位精度以及实验操作简便性,推荐使用4个控制点参与计算仿射变换误差补偿模型。
值得注意的是,当控制点数量增加至8个时,相比于平移变换误差补偿模型,仿射变换模型在X和Y方向上精度都有所提高。这是因为仿射变换不仅能补偿平移误差,还能补偿在行列方向的漂移误差,但提高幅度远没有平移项明显。
(3)结论
此次实验分别采用了平移变换、仿射变换来对自主定位精度进行误差补偿。并且两种误差补偿模型都起到了提高自主定位精度的作用。当采用1个控制点时的平移变换时,定位精度中误差在X和Y方向上分别提高了32.6%和35.9%。当采用4个控制点时的仿射变换模型时,定位精度中误差在X方向上提高了21%,在Y方向上提高了45%。
综上所述,对GeoEye-1卫星影像来说,无论是平移变换误差补偿模型,还是仿射变换误差补偿模型,其最终定位精度都达到了1 pixel左右。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
国际呼吸杂志(2019年4期)2019-03-12
测控技术(2018年4期)2018-11-25
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
雷达学报(2017年1期)2017-05-17
系统工程与电子技术(2016年7期)2016-08-21
