
三维激光扫描和全站仪结合的建筑物立面测量方法研究与工程实践
2019-01-03 09:07曾攀立刘传逢李翅童欣王龙驰夏寅
城市勘测 2018年6期
曾攀立,刘传逢,李翅,童欣,王龙驰,夏寅
(武汉市测绘研究院,湖北 武汉 430022)
1 引 言
城市快节奏发展,智慧城市的建设已到来。随着智慧城市概念的提出,城市三维模型的构造、获取建筑物立面信息显得愈发重要,尤其是在研究建筑物日照时间、古建筑的保护、建筑物美化和扩建、异形建筑物的核实面积测量、大型土木工程、立体量测、变形监测等领域[1]。
传统建筑物立面测量方法是利用全站仪获取建筑物的三维点坐标,结合卷尺及测距仪量取建筑物的细部尺寸,绘制测量略图,然后将测量数据进行格式转换,在测绘软件中展点绘图,依照外业现场绘制的草图构建建筑物平立面图。这种方法原理简单,但是工作量大,需要投入大量工作人员,消耗时间长,效率低下,且越是复杂异性的建筑物精度越低[2~6]。而三维激光扫描技术是一种非接触主动测量全自动高精度立体扫描技术,通过高速激光扫描测量方法,以点云的方式获取建筑物表面采样点的三维坐标,弥补了传统测量方法的局限性、高效快速、简单精确、实时主动、信息丰富,但是三维扫描技术有效测量距离有限,容易受到周边环境的影响,在扫描的时候,容易把周围的树、电线、花坛、车辆、行人等附属物体一起扫描,掺杂在点云数据里面,影响数据精度[7]。为此,本文综合利用两种方法的优缺点,提出了三维激光扫描和全站仪结合的建筑物立面测量方法,以三维激光扫描技术得到的点云数据作为基础,全站仪免棱镜测距技术所测得的数据即可以作为缺失部分点云数据的补充,也可以作为部分建筑物表面点云数据的核实,实现建筑物立面测量。
2 建筑物立面测量方法
2.1 测量方法
三维激光扫描技术用来获取建筑物整体点云数据,点云数据的后处理使用与硬件配套的点云数据处理软件Cyclone 9.1,建筑物平立面图的绘制及面积计算使用AutoCAD软件。整个点云数据后处理过程包括点云拼接、坐标系归一化、点云去噪、点云合并、点云切割及平立面图绘制等几个流程。当被测物周围有过多的杂物,如与邻栋建筑间隔太近、门窗被树木遮挡、墙体周围有花坛等绿化、建筑物上方有较多电线穿过、闹市街区行人较多等因素会直接影响点云数据的精确度和完整性。为此可采用全站仪免棱镜测距技术进行数据采集,在适当位置设站,测量局部位置的三维坐标,通过全站仪测量坐标转换方法转换成二维坐标投影到立面图上,实现建筑物立面测量。其作业流程如图1所示。

图1 作业流程
2.2 坐标转换
利用全站仪免棱镜测距技术进行立面测量一般测量的是三维坐标,史经[8]等提出了一种全站仪编码法实现建筑物立面测量,该方法通过一定的编码规则,将采集的三维坐标转换为距离和高程组成的二维坐标,再通过自动展点程序直观地显示正射投影的立面图。但该方法需要在外业测量架设全站仪时事先确定立面基点和方向点,且必须严格按照编码规则在测量每一特征点时根据该特征点是在立面基点的右侧还是左侧来确定编码中该点的正负号。本文提出了一种无须在外业测量时确定立面基点和方向点的全站仪测量坐标转换方法。该方法可以在内业测量数据处理时进行,且立面基点和方向点的确定可以在数据处理过程中多次选择不同的组合,最终选择误差最小的一对。另外,该方法无须额外制定编码规则,降低了数据采集人员的操作成本。
如图2所示,O-XYZ为绝对坐标系。在某一建筑立面上,分别在立面左右两端选取两个测量特征点A和B。根据测量绘图时自左向右的习惯,可以将A点叫作立面基点,B点叫作立面方向点。根据立体几何原理可知,通过A、B两点可以唯一确定一个垂直于平面YOZ平面的面W。立面数据转换的目的就是将所有该立面的测量特征点坐标数据投影到W垂面上,也即W面为立面投影面。为了降低计算误差,A、B两点的间距应当尽可能大些。
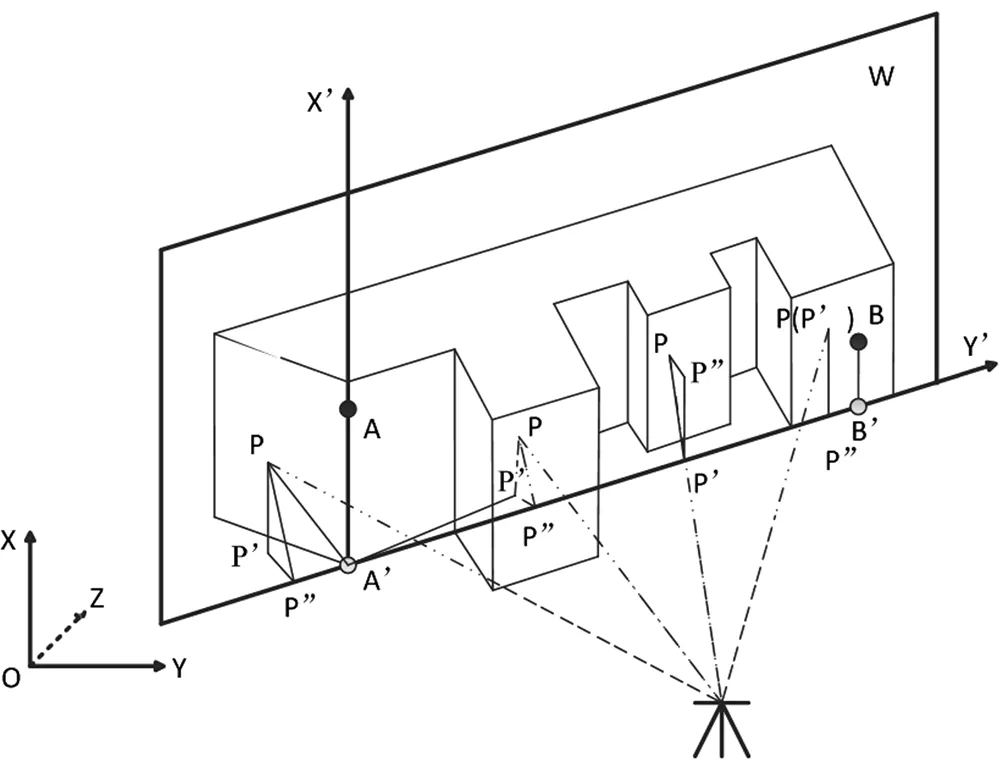
图2 坐标转换
分别作A、B两点在YOZ平面平面上的投影点A′、B′。由A′、B′可以确定一条直线,设直线方程为:
Ax+By+C=0
(1)
设P(xp,yp,zp)点为建筑立面上的某一已知测量点,P′(xp′,yp′,zp)为P点在YOZ平面上的投影点。过P′点作直线A′B′的垂线,交A′B′于点P″。根据点到直线的距离公式可得P′P″的长度为:
(2)
又因为投影之后P′点的横纵坐标与P点相等,所以
(3)
根据两点间的距离公式可得P′点到A′点的距离为:
(4)
根据勾股定理可得:
(5)
由图1可以看出,P点高程测量值h=zp,P″在直角坐标系XAY中的坐标值为(XP″,YP″),XP″=zp,YP″=A′P″,通过P′A在竖向投影线X的左右两侧来判断P′A值的正负,左为“-”,右为“+”。
3 工程实践及分析
以武汉地产开发投资集团有限公司(东湖绿道二期驿站及公共厕所改造)现状建筑平立剖复原测量项目为例,本文采用三维激光扫描和全站仪结合的建筑物立面测量方法进行建筑物立面测量。整项工作分为内业外业两部分:外业作业方法采用三维激光扫描仪及全站仪进行外业数据采集;内业配合Cyclone软件对点云数据进行拼接、裁切、量测等操作,使用C#语言编写“立面坐标转换”程序,处理三维坐标,最后采用CAD编绘成图。
3.1 外业测量
现场踏勘时,拍摄照片,记录周边环境,提前设计最佳扫描路线、选取设站和标靶位置。三维扫描采用徕卡Nova MS60全站扫描仪,该方法的优点是扫描得到的点云数据无须手动拼接。扫描步骤大致分为仪器安置、仪器参数设置、开始扫描、换站扫描等几个过程。对某建筑物外业数据的采集工作耗时 1.5 h,共架设8站,获取到包括测区全部区域在内的73万个三维点。
由于测区客观因素复杂,树木、电线、沙堆等干扰遮挡严重,或者建筑物表面材料对激光的反射和吸收,导致建筑物表面的一些地物特征不明显,点云数据缺失或者不精确,三维模型图甚至有些能明显看出是不完整的,因此还需要全站仪测量来作为辅助。使用徕卡TM50全站仪的免棱镜测量功能获取缺失部分的三维坐标,精度完全符合本次测量工作要求。免棱镜测量技术不需要工作人员手持棱镜,选点灵活,特别是可以在建筑物特征点多、比较隐蔽,三维激光扫描仪无法测量的位置进行工作,如门窗、屋面凸凹线,楼梯、栏杆以及被遮挡严重的要素等。
3.2 内业数据处理
点云数据后处理过程包括点云拼接、坐标系归一化、点云去噪、点云合并、点云切割及平立面图绘制等几个流程。软件的自动拼接报告中,拼站的精度都在mm级别,能够满足整体测区拼站后的精度要求。同时,软件可对点云数据进行剖面裁切,方便地物特征性的提取。如图3所示为徕卡MS60三维扫描仪扫描得到的整体点云数据。

图3 某建筑物点云数据
全站仪测量的三维坐标点,无法直接进行展绘,需要通过坐标转换使每个立面测点坐标相对独立,程序需要实现三维坐标转换成二维坐标的功能。本文采用C#语言编写了自动处理坐标转换的工具,如图4所示。该工具操作简单,快速高效,只需将存储了三维坐标的文本文件导入到工具中,即可一键实现坐标转换。图5为将转换后的坐标在CAD中展点连线得到的局部立面图。
结合以上两种方法最终得到的建筑物四个立面图如图6所示。

图4 立面坐标转换过程


图6 立面图成果
以多站点扫描得到的点云数据为基础,在3ds Max软件中,遵循点云数据的空间结构特征规律,先在某一明显特征点建立XY、YZ或者XZ方向的参考面,参照上述得到的建筑物立面图,构建建筑物的三维基础模型,如图7所示。

图7 建筑物三维模型
4 结论与展望
实践表明:本文提出的三维激光扫描和全站仪结合的建筑物立面测量方法,可以弥补传统测绘手段和新兴测绘手段各自的不足,三维激光扫描技术主要用于获取高精度点云数据、建筑物平面、立面、剖面测量和三维模型重建,它测量精度高、采集速度快,结合全站仪免棱镜测距技术获取点云数据不完整区域的三维坐标,利用C#语言编写了实用工具实现了本文提出的坐标转换方法,将转换后的数据在CAD中展点连线绘制出建筑立面图。全站仪测量方法弥补了不完整的点云数据造成的数据缺失问题,同时也可以作为点云数据精确性的一种检验。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
西部交通科技(2021年9期)2021-01-11
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
智能建筑与智慧城市(2018年11期)2018-11-28
中国资源综合利用(2017年2期)2018-01-22
电测与仪表(2016年16期)2016-04-12
中国房地产业(2016年2期)2016-03-01
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
印制电路信息(2015年6期)2015-12-30
