
三维激光扫描技术在土方测量中的应用
2019-01-03 09:08丁佩缪建军
城市勘测 2018年6期
丁佩,缪建军
(江苏联合职业技术学院南京工程分院,江苏 南京 211135)
1 引 言
土石方测量是工程施工阶段一项重要的工作,其主要内容是计算开挖(或填充)前后的填方量(或挖方量),实际上是计算土方的体积。传统作业模式为利用全站仪或者RTK进行外业高程点数据采集,内业通过DEM法、方格网法、断面法等计算方法进行土方计算。传统土方测量主要存在两个不足:一是外业数据采集,外业数据采集的密度对计算准确度有直接影响,高程点分布均匀,间隔小,其土方计算结果准确度高,但是作业效率低;二是计算方法选择,不同计算方法对土方计算结果准确性也有影响,一般来说,场地起伏小适合DEM法,场地起伏大但是有规律适合等高线法,对于沟渠往往选择断面法[1]。但是对于大型工程来说,施工场地大,地形复杂,如果采用传统方法,则外业数据采集量大,工作效率低,而且很难选择合适的计算方法,精度很难保证。三维激光扫描技术是新兴的测量技术,近年来广泛应用于测量领域,具有测距长、速度快、非接触、精度高等的优势[2]。
三维激光扫描技术又称作高清晰测量(High Definition Surveying,简称HDS),它利用激光测距原理,快速、海量获取被测物体表面三维坐标、纹理、色彩等信息,通过专业软件构建被测物体的三维模型及线、面、体等数据[3]。在获取数据方面,与RTK和全站仪相比,三维扫描技术有着效率高、精度高的优势。利用三维激光扫描仪对大范围地形或者土方进行扫描,可以快速获取大量表面点的三维坐标,从而可以精确地表示被测物体的表面起伏状态,从而提高土方测量精度。
2 三维激光扫描仪技术概述
2.1 三维激光扫描技术原理
三维激光扫描仪主要利用激光测距原理。激光测距(Laser Distance Measuring)是以激光器作为光源进行测距,激光测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离[4]。如果光以速度c在空气中传播在A、B两点间往返一次所需时间为t,则A、B两点间距离D可用下列表示。
式中:D为测站点A、B两点间距离;c为速度;t为光往返A、B一次所需的时间。
三维激光扫描仪是利用激光器系统发射密集的激光脉冲到目标位置,系统记录由目标点反射回来的脉冲信号和激光信号的往返时间,通过坐标转换和计算,计算得到目标的表面三维坐标[5]。被测物体的坐标为以激光扫描仪为中心的相对坐标,可以通过后期定向转化为绝对坐标。除记录被测物体坐标值(X、Y、Z)外,还可通过相机获取影像,记录物体表面色彩值(R、G、B),当需要对被测物体进行建模时,可以利用照片赋予色彩。扫描仪测量时以激光束为单元从左到右、从上到下进行全自动扫描测量,得到完整的、全面的、连续的全景点坐标数据[6]。X轴在横向扫描面内,Y扫描面与X轴垂直,Z轴与横向扫描面垂直,获得P的坐标(如图1所示)。
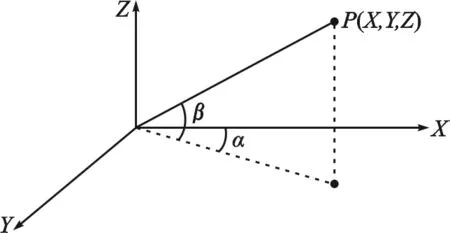
图1 P点坐标计算公式
Xp=Scosβcosα
Yp=Scosβcosα
Zp=Scosα
式中,Xp为被测物体的横坐标,Yp为被测物体的纵坐标,Zp为被测物体的高程,α为P点在XY面的投影与X轴夹角,β为P点与XY面的垂直角。
2.2 三维激光扫描工作流程
利用三维激光扫描仪进行土方测算主要分为外业测量、点云数据处理和数据分析三个步骤[7]。外业测量包括控制测量、三维激光点云数据扫描等;内业数据处理包括坐标转换、点云拼接、建模等;数据分析包括高程点检核、土方量计算、数据成果输出等。具体工作流程如图2所示。
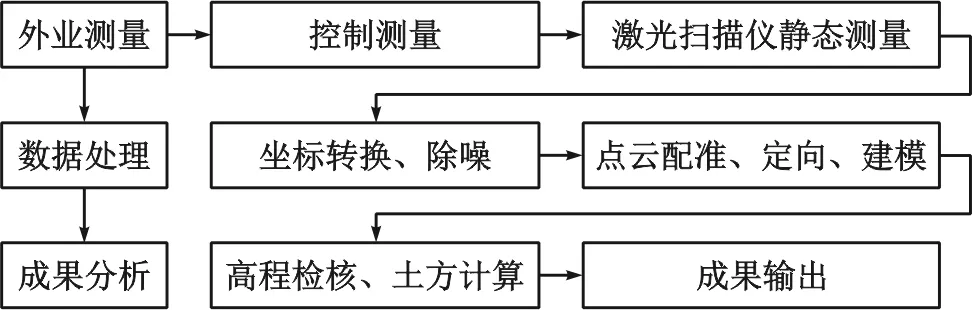
图2 三维激光扫描仪工程流程
(1)外业测量。外业测量主要包括控制测量和三维点云数据获取。控制测量可以通过RTK获取扫描站的坐标,扫描站可以根据场地均匀分布,对于复杂地形要多设站,考虑扫描站之间的衔接,避免出现扫描死角,尽可能提高扫描覆盖率。利用激光扫描仪进行扫描可以事先输入测站坐标,也可以不输入坐标直接扫描,待后续数据处理时再输入测站坐标进行定向。
(2)数据处理。数据采集完毕后输入到专业处理软件中,由于存在植被对激光的反射影响,需要进行除噪,剔除错误数据。由于相邻测站的重复扫描,会造成某一区域点位密度较大,数据烦冗,影响后期数据处理效率,同时需要对数据进行抽稀,保持合理的点位分布密度。点云定向是将测站数据进行坐标转换,利用采集的控制点将相对坐标系转换为绝对坐标系,点云配准是将相邻的测站数据进行拼接,可以通过相邻测站的公共点进行拼接,利用软件的平差功能进行精密平差并评估点云拼接精度。利用软件建模功能进行模型构建,根据工程设计要求选择参考面进行土方体积的计算。
(3)成果分析。选取施工范围内均匀分布特征点,利用RTK图根控制点施测要求采集高程点,与扫描仪高程点进行对比,分析扫描数据精度。将扫描数据导出为DWG格式,方便后期工程应用。
3 工程实例
3.1 测区概况
工程项目需要对原有地形进行开挖平整,地表分布灌木、杂草、垃圾等覆盖物,场地范围约 1.6 km2,作业区域测量条件差,如果按传统方法进行RTK采集数据,费时费力。为提高工作效率,决定利用RIEGL三维激光扫描仪进行测量。测区范围如图3所示。

图3 测区范围

图4 测站设置
本项目利用RIEGL-1000三维激光扫描仪,如图4所示,利用红外激光束快速扫描机进行高速扫描,基于全波形数字化技术,实现高精度测量。仪器的标配点云处理软件为Riscan Pro软件,可以对点云进行附色、拼接、格式转换、输出等处理,满足点云数据处理要求,数据拼接方式有直接定向、自主定位等。具体参数如表1所示。
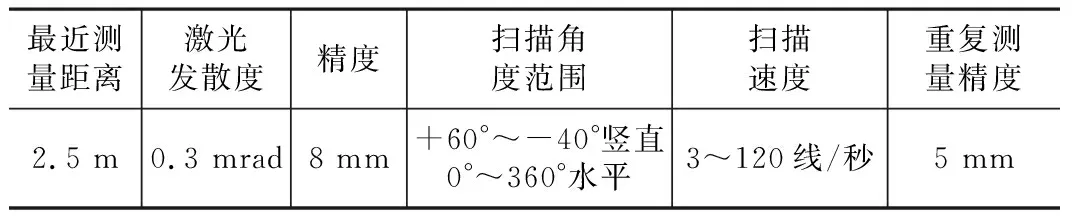
扫描参数设置 表1
3.2 外业测量
本项目根据测区范围共设置测站8个,扫描范围覆盖全测区,并对一些特征物进行冗余扫描,用于后期数据拼接的公共点。扫描站设置可以采用圆周法,通过排列圆周,覆盖测区,并注意测站接边处不能出现死角,防止漏测数据。一般将圆周的半径设置为 400 m(仪器的扫描距离为 2 m~420 m),圆周的中心点即为扫描站。利用该方法设置扫描站,可以清楚看到各个扫描站的扫描范围和扫描重叠度,也避免漏测,该方法快捷、直观。通过提取测站坐标进行RTK放样,确定每一个扫描站的位置。
扫描仪扫描之前,仪器的三脚架要尽量整平,如果倾斜过大会影响后续的数据拼接。因已有每个扫描站的中心坐标,因此可以在扫描前输入测站坐标。在仪器扫描过程中,要避免仪器操作人员和现场其他工作人员遮挡激光,造成扫描数据漏测。因扫描仪每一站扫描数据较大,要及时检查内置存储容量,若储存空间不足应及时插入外接存储设备,以保证仪器正常工作。具体扫描站和扫描数据如图5、图6所示。
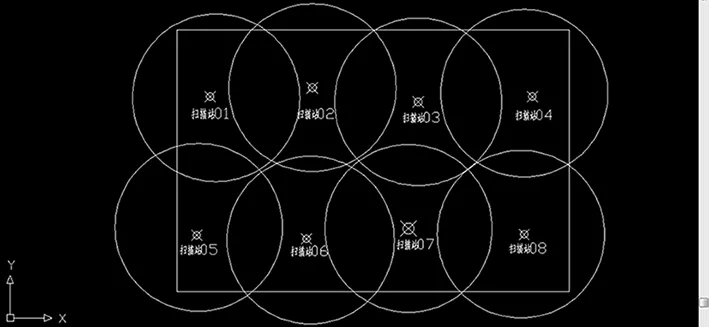
图5 扫描站设置

图6 测区共扫描数据
3.3 数据处理
(1)坐标转换。将RTK测得的测站绝对坐标值输入到对应的测站扫描数据中,使得各扫描测站获得绝对坐标值,如图7所示。
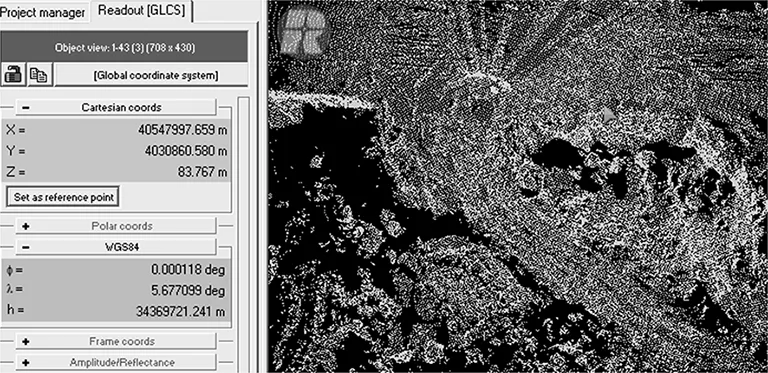
图7 点云坐标转换
(2)点云去噪。三维激光扫描仪测距远,测站之间存在冗余测量,根据施工现场范围剔除多余数据,通过软件过滤功能去除噪声点,得到滤波点云数据。
(3)数据重采样。三维激光扫描仪每一站获取数据量很大,如果不进行抽稀,会增加后期处理难度,因此需要对所获取数据进行重采样。本项目重采样点云间距为 20 cm,点云间距过大则会降低土方计算的精度,点云间距过小虽然会提高土方计算精度,但海量数据处理难度大,对计算机硬件要求很高。本项目所采用的计算机配置良好,但处理高密度点云数据效率低,根据以往经验,当扫描站在10站以下时,点云抽稀间距设置为 20 cm时,可良好得对采集数据进行处理和计算[8]。
(4)数据拼接。手工拼接和自动拼接相结合。手动拼接通过X、Y、Z轴平移和Z轴旋转,自动拼接是利用Riscan Pro软件自有的平差计算功能,不断迭代计算,直到拼接精度达到设定要求,如图8所示。

图8 拼接平差计算
(5)模型构建。通过Riscan Pro软件构建曲面DEM,如图9所示。根据工程需要设置参考面,利用参考面和曲面计算土方体积,如图10所示。

图9 土方模型构建

图10 土方量计算
3.4 成果分析
为检测成果可靠性,需要选取场地特征物,用GPS-RTK测其高程值与扫描的点云高程值进行比较。特征点可以选择表面平整的方形石块,首先提取其点云高程值,然后再通过RTK测量获取其表面高程值,计算两者差值,如表2所示。在工程测量中,RTK高程测量误差为5 cm,初步预估三维激光扫描仪所获取高程点精度满足土方计算的要求。

特征点的GPS-RTK高程值与点云高程值差值计算表 表2
根据项目施工要求,设计底面高程 22.5 m,计算得出总开挖量 374 456 m3,此为自然方,根据土石方松实系数计算规范(见表3),得出需要外运土方为 486 792 m3。目前在建设工程领域对土方量的计算误差没有统一的规定,但在实际合同中范围一般不超过5%,否则会引起施工价的变更,故将土方量计算误差控制在5%之内,可提高工程量编制预算的准确性。该项目土方工程施工从开始到结束,共外运土方 507 700 m3,误差范围在4.3%,满足5%的行业要求。
本项目场地范围1.6 km2,利用RTK采集高程点进行土方量测算,一般来说外业数据采集和内业数据处理需要7天~10天,本项目利用三维激光扫描仪从数据采集到最终成果输出耗时3天,相对于RTK技术在时间上缩短50%以上。
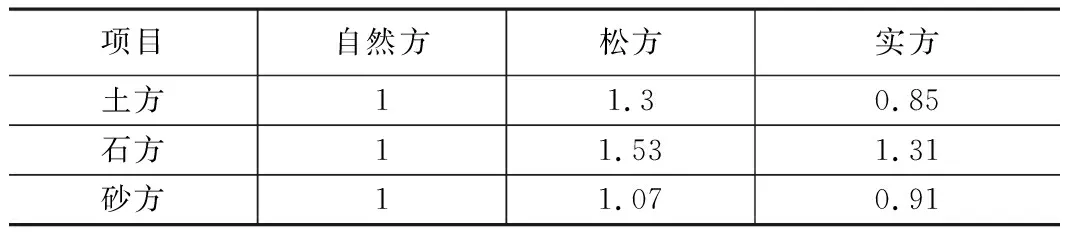
土石方松实系数换算表 表3
4 结 论
(1)在大型工程项目中,传统土方测量方法存在外业数据采集量大、计算结果精度不高、工程效率低的缺点。本项目将三维激光扫描技术应用于土方测量,外业数据获取方便快捷,计算结果精度高,项目完成时效高,特别在地形复杂的工程项目中,相比传统测量方法具有显著优势。
(2)利用三维扫描技术进行土方测量和计算,其计算结果精度受扫描仪标称扫描精度、点云扫描密度、各个测站点云拼接精度的影响,因此在计算机配置满足数据处理容量的前提下,提高点云扫描密度和数据拼接的精度,可以提高土方计算的精度。
(3)三维激光扫描仪获取的数据量大,对点云处理软件和计算机配置要求高。因此开发方便、快捷的点云数据处理软件和高速数据处理器有助于推动三维激光扫描技术在工程测量领域的应用。
猜你喜欢
地理空间信息(2022年11期)2022-11-26
测绘地理信息(2022年2期)2022-04-02
陕西水利(2021年5期)2021-06-21
西部交通科技(2021年9期)2021-01-11
模具制造(2019年3期)2019-06-06
智能建筑与智慧城市(2018年11期)2018-11-28
城市勘测(2018年1期)2018-03-15
中国资源综合利用(2017年2期)2018-01-22
中国房地产业(2016年2期)2016-03-01
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
