
联合高频GNSS和强震仪获取同震位移的一种方式
2019-01-04 00:45季伟
城市勘测 2018年6期
季伟
(长春市测绘院,吉林 长春 130000)
1 引 言
地震又称地动、地振动,是地壳快速释放能量过程中造成振动,期间会产生地震波的一种自然现象。
正确有效的地震预警需要精确可靠的地震观测资料,特别是直接的地表位移观测。目前,常用的地震监测仪器为强震仪和地震仪。强震仪可以很好地捕捉强震震源附近的地面运动,但是却很难准确地把加速度观测结果转换成吻合地震过程的地面位移量。相比强震仪,宽频地震仪更加灵敏,具有更高的对强地面运动观测分辨率,但由于宽频地震仪均为弹性地震仪,其本身存在容易产生振幅饱和、扭曲真实信号等缺陷[3]。
近年来,高频GNSS技术已经广泛应用于地壳运动监测和地震监测领域。随着GPS观测数据处理方法的不断发展和定位精度的提高以及高频(1 Hz)和超高频(20 Hz~50 Hz)GNSS技术的出现[4],使GNSS技术不仅可应用于长期的位移观测,还可用于短期瞬时地壳运动过程的监测,且该技术不受振幅饱和等限制,在震级估算方面更为准确。因此,高频GNSS技术为地震监测提供了一种新途径。
2 高频GNSS接收机与传统地震仪比较
地震时的地表位移是估计地震破裂过程和震级的重要参数。目前传统地震仪和高频GNSS接收机均可进行地震监测以获得同震位移等参数。但是二者其实有着本质差异,如表1所示:
传统地震仪在未发生地震时状态是不工作的,震发后,其获得的是惯性坐标系下的数据,并经过积分获得最终的位移结果。强震仪可以记录地震波形,并通过处理得到地震参数。然而对于震级大于7的大地震产生的地震波,强震仪经常出现量程限幅和饱和等现象,难以完整地记录地震波信号;此外,大地震造成的近场地表地面倾斜和永久位移,又会导致地震仪由于基准偏移而产生的加速度系统偏差与信号扭曲现象,这是利用地震仪获得的速度或加速度数据积分(二次积分)得到位移时,很容易扭曲真实信号[1]。此时,利用积分得到的位移往往会造成对地震的误判,如苏门答腊地震和日本Tohoku-Oki地震。
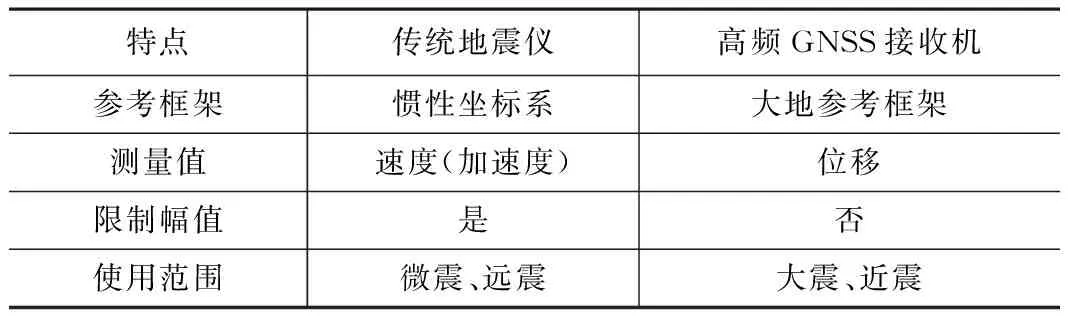
高频GNSS接收机与传统地震仪比较 表1
高频GNSS接收机利用GNSS卫星全天候监测站台处的地面位移,直接获得位移时间序列,少了因积分而放大的噪声等;此外,对于大地震,强震仪能够产生振幅饱和的情况,为了不记录到满幅的速度和加速度,会采取限幅的方法,而GNSS在振幅方面不会产生饱和等情况;它没有仪器响应来限制接收机的观测能力,位移越大其定位相对精度会越高。
本文使用的数据为日本2011年3月11日Tohoku-Oki大地震期间GEONET记录的高频GPS(1 Hz)数据与K-Net/KiK-net记录的地震仪(100 Hz)数据。从K-Net/KiK-net与GEONET的众多站台中选出2组震源距小于 150 km的测站组合的并置站,如表2所示作为研究对象。
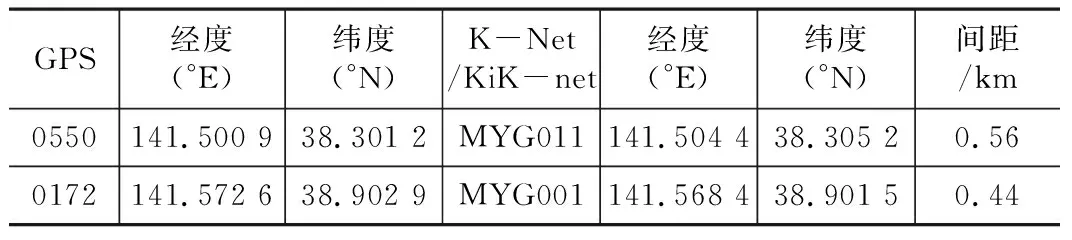
本文选用的并置站信息 表2
为了对比分析通过高频GPS和地震仪得到的位移序列情况,本文通过处理0550站和MYG011站组成的并置站记录的数据,得到二者位移结果,如图1所示:
图1中(a)为MYG011站地震仪在地震过程中得到的3个方向加速度数据。可以看出,想要利用地震仪数据得到预警需要的位移需经过两次积分过程。第一次积分得到3方向速度序列(b),第二次积分得到3方向位移序列(c),(b)、(c)两图中明显反映出数据漂移的现象。这是由于地震仪在地震过程中发生旋转、倾斜等运动导致了基线偏移,而基线偏移引起的误差在积分过程中被放大,使得到的结果中包含严重的误差。图(d)为0550站中高频GPS(1Hz)仪器在地震过程中直接得到的3个方向位移序列,图中明显可以看出3个分量的位移序列在强震动结束后得到的最终位移比较平稳地维持在一定水平,说明其更符合真实情况。图(e)分别为利用高频GPS与地震仪记录获得的地表位移序列,通过对比进一步发现,地震仪获得的最终位移序列出现了明显的漂移,而高频GPS得到的位移序列在经历强烈变化后趋于稳定。
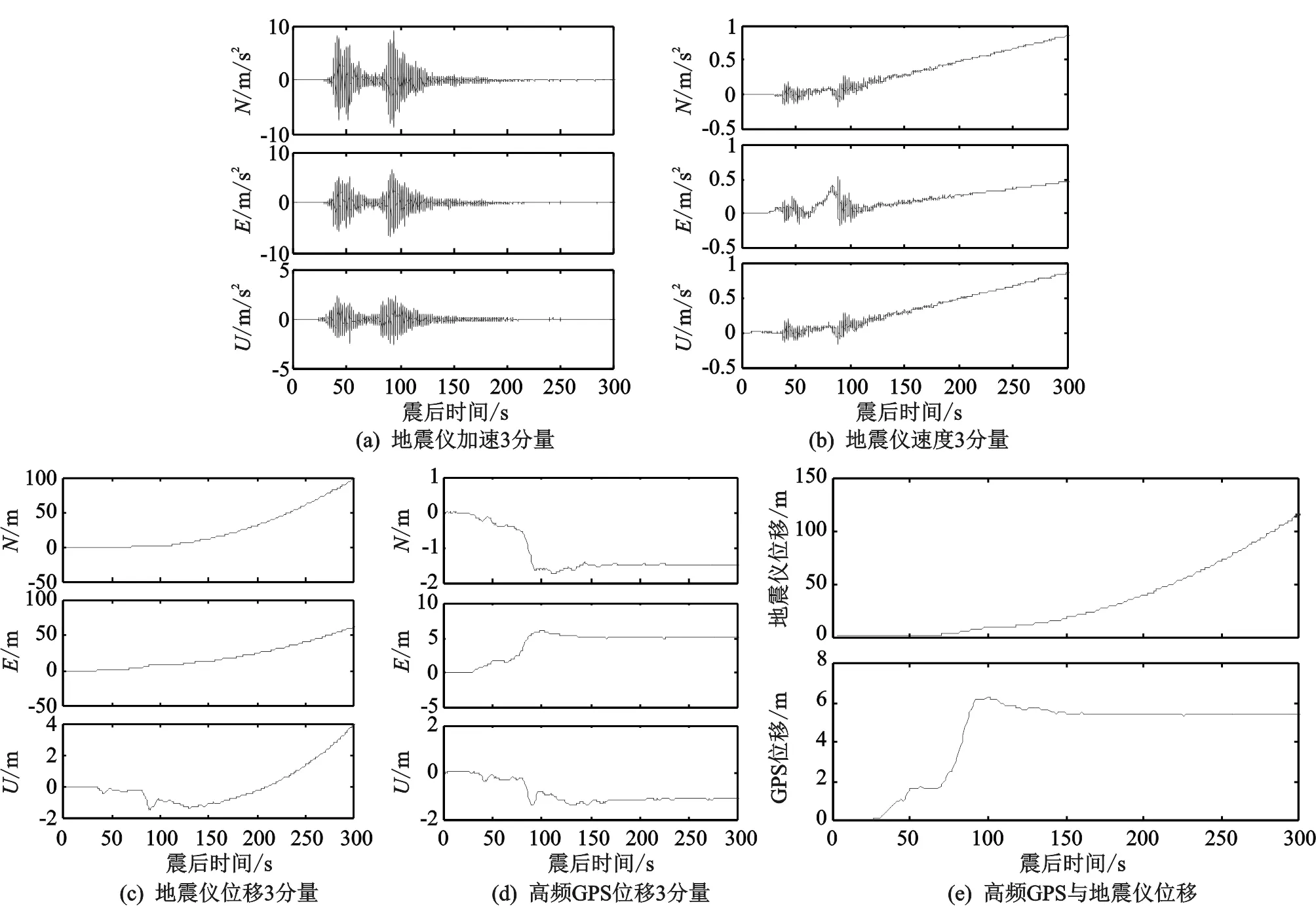
图1高频GPS和地震仪对比图
3 高频GNSS同震位移确定
近年来,联合GNSS的地震预警方法得到了国内外很多学者的关注。由于TPP方式在单站台情况下即可直接实时获得同震位移,不会发生PPP方式存在的收敛问题、也不需要Variometric方式的积分过程。因此,本文采取TPP[5]方式处理GNSS数据以得到GNSS位移监测结果,之后利用卡尔曼滤波对GNSS位移数据和传统地震仪得到的位移数据进行整合处理,得到整合后的位移数据。TPP方式直接获得任意时刻相对于初始时刻的地震位移。算法如下:
非差载波相位观测值和伪距观测值的线性化方程表示如下:
(1)
(2)

通过式(1)、式(2)可得:
(3)
(4)
t0时刻为初始时刻,x(t0)为t0时刻接收机已知位置,卫星轨道误差、电离层误差、对流层误差、相位中心误差和潮汐引起的误差都在PPP模式中很好地消除了。模糊度真实值B(t0)可通过t0时刻接收机钟差tr(t0)和对流层延迟T(t0)推得。之后,认为B(t0)在接下来的历元是固定的。则tn时刻接收机位置x(tn)可表示为:
(5)
由于模糊度已为固定值,因此TPP方式不再需要模糊度收敛过程,且该方法直接计算x(tn),避免了因积分过程造成的误差。
4 联合GNSS和强震仪数据计算同震位移
地震时高频GNSS与强震仪组合接收机位于地表同一位置,此时二者监测到的地表动态同震形变理论上应该是一致的。然而,由于高频GNSS接收机与强震仪获取位移原理的差异,使二者确定地表动态同震形变的能力也存在较大差异。为了避免强震仪因基线偏差改正或函数拟合的主观性造成的偏差,本文利用高频GNSS为非惯性传感器的特点,采取卡尔曼(Kalman)滤波的方法约束强震仪记录,使用联合高频GNSS记录和强震仪记录来确定地表动态同震位移[2]。处理过程中认为东西方向、南北方向和垂直方向的地表动态运动是相互独立的,Kalman滤波器的状态方程和观测方程离散化后,联合高频GNSS位移和强震仪加速度序列就可以一次估计状态向量Xk,也就是位移dk和速度vk,实现过程可描述为:
初始化:
X0=0P0=I
(6)
预测(先验估计):
(7)
(8)
更新(后验估计):
(9)
(10)
鉴于强震仪采样率(80 Hz~250 Hz)远高于高频GNSS接收机采样率(1 Hz~5 Hz),因此在此过程中为了让Kalman滤波器在多个采样率组合情况下依然可用,滤波过程的预测过程需在每个采样均执行,而更新过程则只在高频GNSS数据存在的历元执行。
通过分别处理0550(高频GPS)站和MYG011站(地震仪)组合以及0172(高频GPS)站和MYG001站(地震仪)组合的地震记录得出相应的位移序列。之后,使用上述Kalman滤波方法对0550站位移序列与MYG011站对应位移序列进行滤波处理,可得组合的位移序列,如图2所示;同理,可得0172站和MYG001站的组合位移序列,如图3所示:

图2 0550/MYG011站组合位移、地震仪位移与GPS位移对比
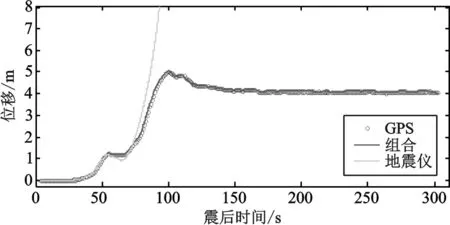
图3 0172/MYG001组合位移、地震仪位移与GPS位移对比
通过对比图2和3显然可以看出,在地震仪得到的位移序列描绘出了地面动态运动,但是位移序列的后半段发生了严重的漂移;单纯GPS位移序列清晰地描绘出了峰值位移和永久性偏移,这说明了GPS得到的位移在低频段效果很好。然而,单纯GPS位移与组合位移的差异显示出单纯GPS位移包含着由GPS精度相对较低引起的高频噪声。此外,地震仪在描述地面动态运动的优势使得组合位移比单纯GPS位移在动态位移精度上得到了显著提高,这对地震P波到时拾取也大有裨益。
5 总 结
本文对强震仪和高频GNSS两种观测手段进行了对比分析,指出了它们在获取同震位移时各自所面临的问题,并通过日本地震中真实数据对比分析了高频GNSS与地震仪监测大地震的效果。为了克服单观测手段的不足,采取了顾及基线偏差改正的GNSS和强震仪组合模型。研究讨论了获取地震仪和高频GNSS组合位移方法的原理和方法,并利用真实地震数据进行了实例验证分析。
猜你喜欢
环球时报(2022-07-28)2022-07-28
水文地质工程地质(2022年2期)2022-04-13
军事文摘(2018年24期)2018-12-26
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
环球时报(2018-02-08)2018-02-08
中国化妆品(2017年12期)2017-06-27
电子制作(2016年1期)2016-11-07
小星星·阅读100分(高年级)(2016年10期)2016-09-10
系统工程与电子技术(2016年4期)2016-08-24
