考虑人机匹配模式的舰载机甲板机务勤务保障调度算法
2019-01-18 11:51苏析超韩维张勇宋璟毓赵振宇
航空学报 2018年12期
苏析超,韩维,*,张勇,宋璟毓,赵振宇
1. 海军航空大学,烟台 264001 2. 中国船舶工业系统工程研究院,北京 100094 3. 中国人民解放军92950部队,葫芦岛 125100
以舰载机为核心作战力量的航母编队是当今乃至未来很长时间内遂行重要军事任务,维护海洋权益的“大国利器”,同时也是一项高新技术密集型军事系统工程,其综合作战效能的发挥与舰载机装备性能以及航母舰载机的指挥管理和协调调度水平密切相关[1]。相比于陆地机场,航母平台甲板空间有限,作业环境多变,工序流程及资源约束复杂,任务种类繁多[2],如何在复杂甲板作业环境下对舰载机机群及相关保障的人员和设施设备进行科学合理的资源分配和时序规划,以缩短作业时间,提高资源的使用效能,实现各阶段作业协调、安全、高效,是制约舰载机机群出动效能的核心问题,也是世界各国航母作战保障指挥的关键技术。
国内外诸多学者针对舰载机甲板作业调度问题已开展大量研究,研究的视角包括全流程作业调度和分阶段作业调度两个层面。首先在全流程作业调度层面,2009年,美国麻省理工学院开发了航母甲板作业规划决策系统(Deck operations Course of Action Planner, DCAP)[3],该系统可以自动模式、人工模式、人机交互模式完成保障任务规划,实现飞行甲板域舰载机及人员车辆管理的综合集成。基于该系统平台,Michini和How[4]构建了甲板调度的马尔科夫决策模型框架,并基于逆向强化学习,将专家调度经验转换为智能调度策略;Dastidar和Frazzoli[5]建立飞行甲板操作的排队网络模型,将调度问题转化为作业网络节点服务优先序的优化问题,并设计了基于差分进化的求解算法;Ryan等[6]设计了基于线性整数规划的重调度模型并内嵌于DCAP系统内,通过仿真验证了随着调度规模的递增,基于模型的自动调度相比人工经验调度更具优势。Qi和Wang[7]针对舰面保障任务互为耦合,一般数学模型难以有效表达操作规程和经验知识的问题,提出了层次任务网络规划算法以提升规划的效率。基于Multi-agent方法,冯强等[8]针对舰载机故障与维修的扰动影响,构建了舰载机作业动态调度模型,并应用于维修人员配置优化[9];文献[10]构建了无人机甲板作业的指挥控制与调度系统架构。在调度系统集成方面,主要成果包括航空数据管理和控制系统(Aviation Data Management And Control System, ADMACS)[11],DCAP以及航母甲板作业规划系统(Aircraft Carrier Deck Operation Planner System, ACDOPS)[12]等。
在分阶段作业调度层面,可将甲板作业流程划分为出库及甲板转运[13],机务勤务保障[14]和滑行出动[15-16]3个阶段。其中,出库及甲板转运和滑行出动的核心是舰载机的甲板路径规划问题[17-19];而机务勤务保障涉及相关保障人员、设施设备的协同和调度,作业流程及资源约束复杂,且时间跨度长,从作业内容和时间角度看是甲板作业的主体阶段;从调度问题的复杂性角度,则是甲板作业全流程调度的核心难点。对此,相关研究的视角经历了由单机优化[20]向多机优化[21],由机务保障优化[21]向机务勤务协同优化[14],由多站式保障[22]向集中式[23]和一站式[14]保障逐步拓展;模型抽象经历了由混合流水车间调度[24-25]向柔性作业车间调度[26]和资源受限项目调度[14,21,27]不断深化的过程,并采用粒子群算法、差分进化算法、Memetic算法、遗传和声混合算法、混合遗传禁忌搜索算法、POEM优化平台等对模型进行求解。
综上所述,现有研究虽然取得了一些成果,但仍存在以下3个方面的不足:① 面向全流程作业的研究大多聚焦于飞机在重要过程和节点的决策优化,针对机务勤务保障的模型要素不够系统全面,往往忽略了保障人员的分配和调度;② 当前研究大多将不同专业人员按小组划分,并假设可进行全甲板域的保障作业,而实际上这仅适用于勤务作业,机务保障主体细化至个人,且还需考虑机务保障人员与飞机的人机匹配模式,不同模式下机务保障人员的可保障飞机范围不同;③ 当前研究仅考虑飞机在不同停机位之间的转移时间,而保障人员和保障设备在不同飞机站位之间切换保障的转移时间,以及其对机群保障完工时间的影响尚未有所考虑。
针对上述研究短板与存在问题,本文以舰载机甲板机务勤务保障调度为研究对象,系统分析国内外机务保障所采用的单机机组模式、大机组模式和一体化联合保障模式等人机匹配模式,引入保障人员和保障设备的甲板转移时间,基于机务勤务保障的流程和资源约束,研究建立考虑人机匹配模式的舰载机甲板机务勤务保障调度模型与优化算法,面向机务勤务保障作业完工时间、保障人员累积转移时间和闲忙比方差和等指标,对比分析不同人机匹配模式的优缺点,并实现对舰载机机群甲板机务勤务保障时序的调度优化和保障资源的科学分配,从而提升机群甲板作业效率和资源利用率,进一步助推航母舰载机的出动回收的综合效能,且为舰载机甲板机务勤务保障模式的改进提供一定理论参考作用。
1 问题描述
1.1 机务勤务保障关系与模式分析
舰载机甲板机务勤务保障是指舰载机机群出库转运或着舰回收后,根据甲板布列计划,调运至指定保障停机位,并在这一停机位完成直接出动准备或再次出动准备所涉及的机务保障和勤务保障作业。其中,机务保障作为保障的主体,由不同专业的机务人员对飞机执行起飞前的检查维护、充气、加油、通电和挂弹等一系列保障工序,确保飞机具备可出动执行任务的能力;勤务保障作为辅助保障,主要为机务保障提供所需的供给性资源,具体包括燃油、电源、液压、弹药、氧气、氮气等等。
在机务保障中,一旦保障人员被指派至相应的飞机,即形成严格的保障对应关系,即人机匹配。按照匹配的深度和广度不同,又可具体划分为单机机组模式、大机组模式和一体化联合保障模式。
1) 单机机组保障模式是指每架飞机的机务保障工作由一个固定的机务小组负责,对同一型号舰载机,机组各专业人员的配置固定。该模式是目前陆基和舰基保障最常用的模式,其优点是机组各专业人员对所属舰载机的技术特性较为熟悉,保障质量和效率较高;而缺点是人员被固定分配在某一飞机上,导致人员的利用率不高、保障活动缺乏弹性。
2) 大机组模式则是在单机机组模式的基础上进一步拓展,即机务组可保障若干架同型号飞机,与单机机组模式不同在于,保障专业人员的数量不固定,而是根据保障任务而确定。该模式当前主要应用于俄罗斯海军的舰载机保障,且一般由4架舰载机组成一个大机组,其优点在于人员保障灵活,且利用率得到一定程度提升;缺点是增加了保障人员组织管理的复杂性。
3) 一体化联合保障模式则是对保障人员的最大释放,即各专业保障人员可保障甲板机群同一型号的各个舰载机,取消了保障范围的限制,人员数量根据保障任务指派。该模式当前主要应用于美军的舰载机保障,其优点和缺点均是在大机组模式下优缺点的进一步深化,且对保障人员的分配和调度提出了更高要求。
在勤务保障方面,保障设备/组与飞机之间的匹配关系主要受制于固定类保障设备的保障覆盖范围,这是由其保障管路长度受限所导致,移动类保障设备/组则可实施全甲板域的保障。以库兹涅佐夫号航母为例,甲板作业中各类人机匹配模式和勤务固定类设备保障示意图如图1所示,A1~A16 表示舰载机。其中匹配模式A、B和C分别表示单机机组保障模式、大机组模式和一体化联合保障模式。

图1 甲板作业人机匹配和固定类设备保障示意图Fig.1 Schematic diagram of man-aircraft matching patterns and stationary equipment service support on flight deck
1.2 保障流程与资源约束分析
根据甲板保障作业约束条件属性,可划分为作业流程约束和资源约束两大类,其中资源约束又可细分为机务保障人员约束、勤务保障设备/组约束、站位空间资源约束和供给类资源约束。
1) 作业流程约束。波次出动机群中各舰载机的保障工艺流程不仅与机型保障特性相关,同时也与任务需求紧密相连。舰载机在入位系留后,将进行装备检查、加油、通电、充气、挂弹等一系列机务勤务保障作业,将单机的保障活动抽象为一个项目,波次出动舰载机机群的保障作业流程可采用合成的活动节点网络(Activity On Node Network, AON) 图进行描述,如图2所示,In表示第n架舰载机,Oij表示第i架舰载机的第j道工序。

图2 多机保障流程网络图Fig.2 Support operation network of multi-aircraft
对第i架舰载机,其保障工序流程AON图可表示Di=(Vi,ANi),其中,工序节点集Vi代表保障工序集合,实线有向弧ANi代表各工序间的逻辑约束关系,通过机群保障开始虚工序OS和结束虚工序OE将单机保障流程网络合并可得D=(V,AN∪AP∪AE),其中V和AN分别为机群的保障工序和流程有向弧集合,所增加虚线有向弧AP和AE分别代表机务保障人员和勤务保障设备/组在保障工序间转移所形成的资源保障流,在保障计划确定资源分配方案后形成。
2) 机务保障人员约束。保障人员按专业划分为特设、军械、机械、航电等类型,根据人机匹配模式,机群将划分为若干机组,组内所匹配的各专业保障人员则存在保障飞机范围约束、人员数量约束和不同停机位之间的转移时间约束。
3) 勤务保障设备/组约束。保障设备/组可划分为固定类设备站和移动类保障设备/组,该类型资源约束主要体现在资源数量上的限制和保障范围的约束:① 固定设备站供给管路的长度限制,仅能保障管路长度范围内的舰载机,如图1所示;② 保障设备/组的数量约束;③ 保障设备/组在不同飞机之间的保障切换和转移时间约束。此外,保障设备又可划分为共享式设备和独占式设备,共享式设备指一个设备可同时满足多道工序的保障,比如供电站所提供电源可同时保障通电检查和加油等工序;独占式设备是指一个设备任意时刻只能提供一道工序使用,加油站、液压设备站等均属于独占式设备。分配在独占式设备的工序需满足独占性约束,即保障设备对各工序进行分时保障,共享式设备则不存在此约束。
4) 站位空间约束。主要针对诸如座舱等保障站位由于空间受限无法并行开展多项工序作业,只能按照先后顺序依次占用进行保障。
5) 供给类资源约束。受舰船航空保障技术水平的制约,勤务保障设备在供给燃油、电源、氧氮和液压油等资源的瞬时供给量存在一定上限,如供油的油压限制仅能满足一定数量的舰载机同时进行加油作业。
2 调度模型建立
假设甲板各停机位的勤务保障资源充足,可满足舰载机在任意停机位的原位保障,即集中式保障[23]。舰载机甲板机务勤务保障调度模型旨在确保满足作业流程和各类资源约束的前提下,基于特定人机匹配模式,为每架飞机的保障项目合理安排时序,并分配相应专业保障人员和保障设备/组,以实现机群完工时间、甲板人员转移时间和负载均衡性等保障指标最优化。
2.1 调度模型参数及决策变量定义
模型参数定义如下:
I待保障舰载机集合,I={1,2,…,Nf},Nf为待保障舰载机数量
pi第i架舰载机的保障停机位
L(pi,pj)甲板停机位pi与pj之间的距离
Ji第i架舰载机的工序集,Ji={1,2,…,|Ji|}
J机群的总工序集,J={(i,j)|i∈I,j∈Ji}
C机务保障机组集合,C={1,2,…,Nc},Nc为机务保障机组数量
γic飞机机组匹配状态量,若第i架舰载机属于第c个机组,γic=1;否则γic=0
At机群在时刻t处于执行状态的所有工序集
Ait第i架舰载机在时刻t处于执行状态的工序集
Oij第i架舰载机的第j道工序
Oeg第e架舰载机的第g道工序
Psij工序Oij的紧前工序集合
Exi第i架舰载机入场系留完毕时间
dij工序Oij的保障作业工时
Kp机务保障人员专业集合,Kp={1,2,…,|Kp|}


vpk第k类专业保障人员的甲板转移速度
Ks站位空间类别集合,Ks={1,2,…,|Ks|}
Keu独占式勤务保障设备/组集合
Kes共享式勤务保障设备/组集合
Ke勤务保障设备/组类别集合,Ke=Keu∪Kes
Lek第k种保障设备/组集合,Lek={1,2,…,|Lek|}
vekl第k种第l个保障设备/组的甲板转移速度
Kw供给性资源类别集合,Kw={1,2,…,|Kw|}
Lwk第k种供给性资源可同时保障飞机数量

rpijk工序Oij保障所需第k类专业保障人员的数量
reijk工序Oij对第k种保障设备/组的需求量,
reijk=1表示有需求,否则reijk=0
rsijk工序Oij对第k类站位空间的需求变量,
rsijk=1表示有站位空间需求,否则rsijk=0
rwijk工序Oij对第k类供给性资源的需求变量,
rwijk=1表示有需求,否则rwijk=0
Cmax舰载机机群保障完工时间
决策变量定义为
Sij保障工序Oij的保障开始时间
Eij保障工序Oij的保障结束时间
2.2 目标函数
面向舰载机甲板机务勤务保障需求,分别构建最小化机群完工时间、最小化保障人员累积转移时间和最大化保障人员负载均衡性等3类优化目标。其中考虑到勤务保障的主体为保障设备,且使用频率较低,因此目标函数中保障人员主要面向作业压力较大的机务保障人员。
1) 最小化机群保障完工时间
甲板作业效率是制约舰载机机群出动回收效能的核心指标,机群保障作业周期越短,单位时间内可出动舰载机的波次越多。因此,调度模型以最小化机群保障完工时间作为首要的优化目标,即
(1)
式中:Ei|Ji|表示第i架舰载机最后一道工序的完工时间,机群完工时间Cmax取决于机群各舰载机的最后一道工序完工时间。
2) 最小化保障人员累积转移时间
由于甲板上存在各式各样的危险源,例如舰载机甲板转运及滑行所产生的尾焰,因此保障人员在甲板上频繁地转移不仅会增加一定的安全风险,同时也可能对甲板飞机和设备转运造成一定干扰。基于此考虑,调度模型的优化目标取保障人员累计转移时间CT最小化。
(2)

3) 最大化保障人员负载均衡性
保障人员作为保障活动的主体,其良好的作业状态是维持保障作业持续高效开展的前提。若部分人员的保障作业任务过于密集繁重,而其余人员过于空闲,这类负载的不均衡性并不利于长期维持良好的作业状态,因此,本文以保障人员的闲忙比方差作为衡量负载均衡性的指标,且模型的优化目标使得各类保障人员闲忙比方差和IBV最小化
(3)

(4)
(5)
在实际保障作业中,以上3个优化目标存在一定优先级别,因此不妨以字典序进行组合,即调度模型以最小化机群保障完工时间作为第1优化目标,另外两个优化目标则根据调度指挥员的决策要求分列第2和第3优化目标。
2.3 约束条件
1) 保障流程时序约束
保障流程时序约束主要包括两方面:① 单机开始保障的入场时序约束,即飞机需转运至指定停机位系留后方可开展机务勤务保障作业;② 各舰载机的保障工序需按照保障流程的前后序依次开展,即
Si1≥Exi∀i∈I
(6)
Sij≥Sih+dih
∀(i,h)∈Psij,∀(i,j)∈J
(7)
2) 机务勤务转移保障时序约束

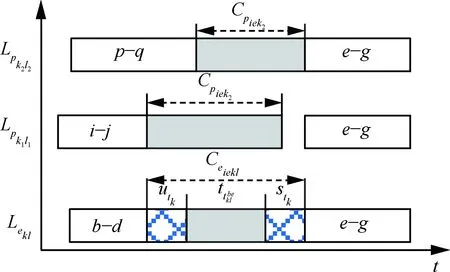
图3 机务勤务保障资源转移保障示意图Fig.3 Schematic diagram of transfer of maintenance and service support resources
基于上述分析,机务转移保障时序约束可表示为
BM(1-Yijeg)
∀(i,j),(e,g)∈J,∀k∈Kp
(8)
式中:BM取足够大实数,确保不等式恒成立。
勤务保障方面,上述分析是基于资源为独占性的假设,若针对共享式保障设备,当待调度的工序Oeg与当前正在作业的工序Oij属于同一飞机(i=e),当满足其他约束下可即刻开展保障,而无需待保障Oeg结束;当且仅当所保障的工序分属不同舰载机时(i≠e),转移保障时序约束成立,即
∀k∈Keu∨(∀k∈Kes∧i≠e),
∀(i,j),(e,g)∈J,∀l∈Lek
(9)

3) 机务保障人机匹配约束
在不同人机匹配模式下,舰载机机群和机务保障人员被划分为若干机组C={1,2,…,Nc},如单机机组保障模式下,一个机组仅包含一架飞机和若干固定配置的保障人员,Nc=Nf;在一体化联合保障模式下,机群和所有保障人员即为一个机组,即Nc=1;在大机组模式下,以典型4机大机组为例,机组数可划分为Nc=Nf/4,其中·为向上取整运算符。在任意机组内,所匹配的保障人员仅能对该机组内的飞机进行保障,而无法跨机组作业,即
∀(i,j)∈J,∀c∈C
(10)
4) 勤务保障范围约束
如1.2节所述,固定类保障设备由于供给管路的长度限制,仅能保障管路长度范围内的舰载机,而移动类设备/组也可以看做是覆盖范围涵盖整个甲板域的固定类设备,该约束可表示为
∀(i,j)∈J
(11)
5) 资源保障能力约束
针对机务保障人员,对任意时刻t,在各机组内的飞机正在执行保障的工序集对任一专业机务保障人员的需求量不得超过分配至机组内该专业保障人员总数,即
∀k∈Kp,∀c∈C,∀t>0
(12)
针对独占式勤务保障设备/组,在任意时刻t,机群正在执行保障的工序集对任意类型保障设备/组的需求量不得超过甲板所配置的该类型保障设备/组总数,即

(13)

(14)
针对站位空间资源,对任一舰载机i,其各类站位空间在任意时刻仅能容纳保障人员开展一项工序作业,即

(15)
针对供给性资源,在任意时刻t,正在执行保障的机群中对任意类供给性资源存在需求的飞机数不得超过该类供给性资源可同时保障飞机数量,即

(16)
6) 资源分配约束
任意工序对各类机务保障人员和勤务保障设备/组等保障主体的需求总量应与分配至该工序的资源量相匹配,即

(17)

(18)
特别地,针对共享性保障设备,应确保同一时刻单架舰载机对同种设备有需求的不同工序均分配在同一设备上,避免多台共享式保障设备同时保障单架飞机,即
∀(i,j)∈J,∀k∈Kes,l∈Lek
(19)
7) 布尔类型变量约束
∀k∈Kp,∀l∈Lpk,∀k′∈Ke
∀l′∈Lek′,∀(i,j),(e,g)∈J
(20)
3 调度算法设计
基于上述建模分析,舰载机甲板机务勤务保障调度是在多架舰载机在工序网络化流程和多类资源约束下进行保障作业时序优化和保障资源分配,因此可将该调度问题归类于资源受限(多)项目调度问题(Resource-Constrained (Multi-) Project Scheduling Problem, RC(M)PSP)[28]。在RC(M)PSP领域,近些年的研究侧重于基本模型向多模式多项目等实际场景的拓展和求解算法的创新,而缺乏对资源转移时间的考虑[29-30]。鉴于遗传算法在RC(M)PSP领域的广泛应用,本文选择其中较为经典的双种群遗传算法架构[31],针对涉及资源转移的调度解码则借鉴文献[30]的串行调度生成机制(Serial Schedule Generation Scheme, SSGS)。
3.1 算法流程
算法采用双种群循环进化结构,并将常规基于个体的双向对齐(Double Justification, DJ)[32]技术转化为基于种群的双向对齐。算法包含两个种群:左种群PopL和右种群PopR,左种群个体采用左对齐调度,即调度顺序按照流程约束从前往后,各工序安排在最早可开始时刻,即令时序计划在时间轴上向左对齐;右种群个体则采用右对齐调度,调度顺序与左向调度相反,即令时序计划在时间轴上向右对齐。算法执行流程如图4所示。
算法具体执行步骤如下:
步骤1输入舰载机机群保障任务,包括各舰载机保障作业流程、工序工时、对资源的需求量,以及机务勤务保障各类资源状态参数;选择人机匹配模式,并将机务保障人员匹配至相应机组飞机。
步骤2随机初始化生成左种群PopL。
步骤3执行右种群的遗传进化,任意个体的进化操作按如下步骤执行:
步骤3.1取左种群PopL的第i个个体作为父代个体,再从除父代个体之外的PopL剩余个体中随机选择两个互不相同的个体,根据二元锦标赛策略,选择其中适应度值最优的作为母代个体。
步骤3.2对父代个体和母代个体执行两点交叉操作。
步骤3.3执行随机变异操作,按变异率随机选取工序,并在该个体的时序范围内随机扰动,生成两个子代个体。
步骤3.4对两个子代个体分别进行基于SSGS的右向对齐调度解码,得到时序方案和资源分配方案。
步骤3.5根据解码的调度方案,评价子代个体适应度,对比择优保留。
步骤3.6以最新个体右向对齐形成的调度时序方案的开始时间修正个体编码,得到所有子代新个体组成的右种群PopR,记录种群最优解。

图4 双种群遗传算法流程图Fig.4 Flowchart of double-population genetic algorithm
步骤4对左种群PopL进行遗传进化,具体每个个体的进化操作步骤与右种群进化相同,其中的操作差别在于以下3点:① 任意个体的父代母代个体选择来源于右种群PopR,选择机制与步骤3.1相同;② 时序方案由基于SSGS的左向对齐调度生成;③ 最终保留的子代的编码采用左向对齐形成时序方案的结束时间来修正,得到所有子代新个体组成的左种群PopL。
步骤5判断是否达到迭代终止条件,若是,则迭代终止,并输出最优基准调度方案和资源分配方案;否则,转入步骤3进行右种群的遗传进化。
3.2 编 码
编码主要用于表示机群保障工序调度的优先级,算法采用基于作业时序修正的优先数编码,即当得到一个新解之后,通过SSGS生成保障时序方案,并将每道工序的开始时间/结束时间转化为编码优先数。相对于常用的任务列表编码,该编码方式更为简洁,同时缩小了搜索空间,可实现编码与调度方案的一对一映射。针对左种群和右种群的不同调度方式,编码形式有所区分:
1) 针对右种群,右向对齐生成时序方案后,以工序的开始时间修正个体编码,即
xR=[S11S12…S1|J1|S21…Sij…SNf|JNf|]
以便于左种群遗传操作中在调用右种群个体进行左向对齐调度。
2) 针对左种群,左向对齐生成时序方案后,以工序的结束时间修正个体编码,即
xL=[E11E12…E1|J1|E21…Eij…ENf|JNf|]
以便于右种群遗传操作中在调用左种群个体进行右对齐调度。
3.3 解 码
解码采用考虑资源转移的串行调度生成机制[30],将保障工序集合按照优先级依次调度,左向调度时编码数越小越优先,右向调度时编码数越大越优先。以左向调度为例,针对任一待调度工序Oij,包含3个层面的决策:一是时序调度,首先由其紧前工序的最大完工时刻开始,按最小时间间隔向后递推搜索,直至到达某时刻t,使得有充足的机务勤务保障资源转移至该工序所在站位,并满足站位空间资源和供给性资源约束,则令Sij=t,Eij=t+dij。二是为该工序分配机务保障人员,根据算法优化目标的字典序确定分配规则,若选择min CT作为第2优化目标,则将空闲人员集合按转移时间排序,优先分配转移时间最小的人员;若选择min IBV作为第2优化目标,则将空闲人员集合按累积保障时间排序,优先分配累积保障时间最小的人员,从而使得保障人员的负载均衡化。三是为该工序分配勤务保障设备/组,若对共享式设备有需求且当前时刻有该类设备保障本飞机,则直接分配至该设备;否则针对其他情况,采用基于覆盖范围内剩余工序作业时间最少优先规则(Minimum total processing Time Remaining in Covering Area, MTRCA)[14],即选择空闲设备中覆盖范围内的舰载机待保障工序时间和最小的设备。
3.4 适应度函数
为便于算法进行个体适应度比较,将字典序多目标通过赋予权重组合为单目标,并定义个体适应度为
f=Cmax+αCT+βIBV
(21)
式中:α(0<α=1)和β(0<β=1)分别为保障人员累积转移时间和闲忙比方差和的权重系数,调度指挥员可根据保障需求进行权重调节。
4 仿真实验
4.1 实验案例设计
以图1所示的库兹涅佐夫号航母甲板作为舰载机机群机务勤务保障的平台,甲板可停放最多16架固定翼舰载机,为便于3种人机匹配模式的仿真对比,保障对象假定为执行空空作战或空面打击等不同作战任务的同型号固定翼舰载机,机群的出动规模一般为8机、12机或16机。
针对同型号舰载机,构建单机通用化保障流程的AON图如图5所示,nd为单机挂弹数量,各项工序的含义及机务勤务保障资源需求如表1所示。其中,各工序对机务和勤务保障的需求量均为1,挂弹工序为不确定项,根据作战任务确定,本文案例假定执行对空作战任务时携带两枚近程空空导弹和两枚中远程空空导弹;执行对面打击任务时携带两枚空空导弹和两枚对地/反舰导弹。

图5 单机保障流程网络图Fig.5 Support process network of single-aircraft
表1 单机保障工序及机务勤务保障资源需求Table 1 Operation set and resource demand of single-aircraft support
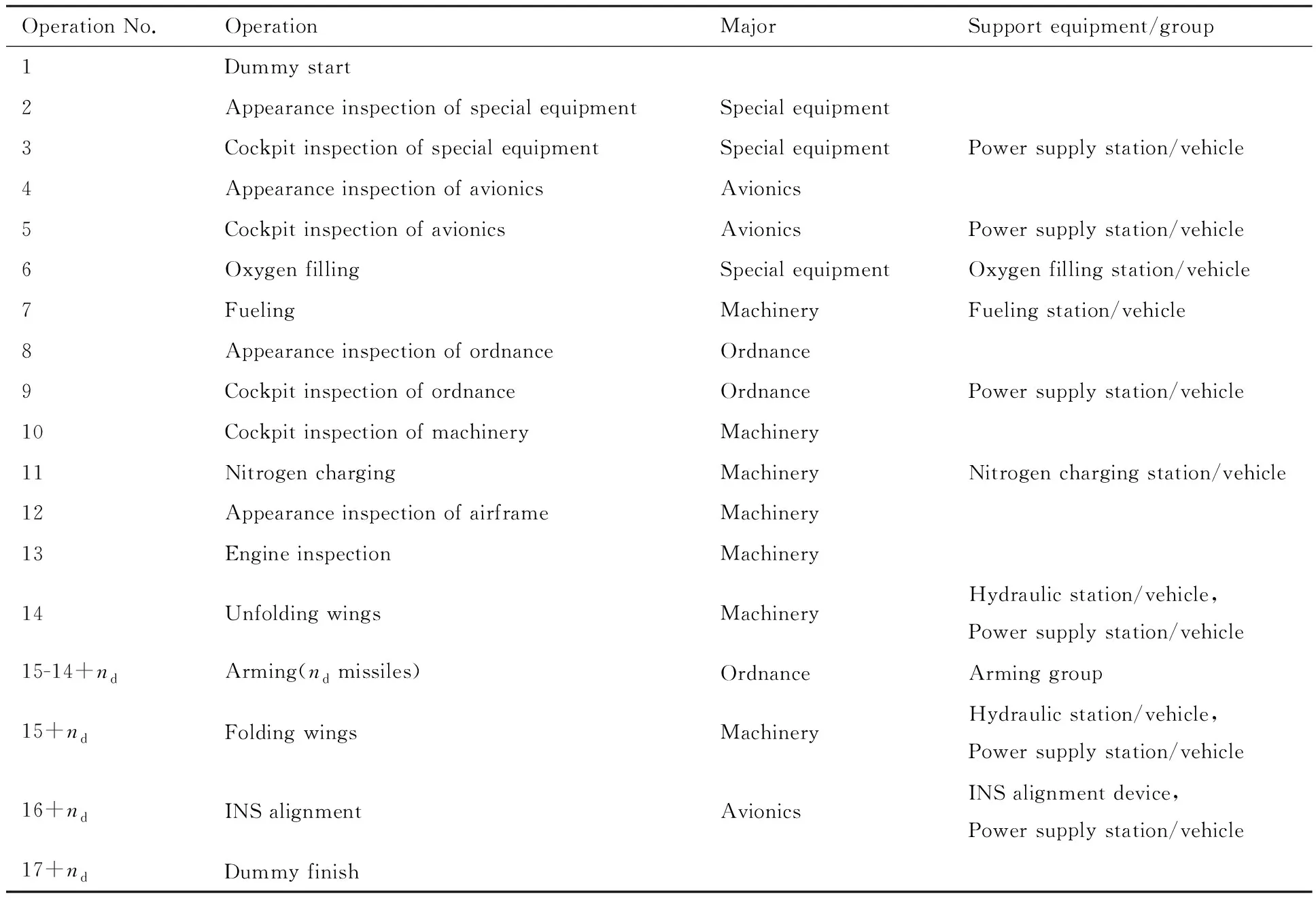
Operation No.OperationMajorSupport equipment/group1Dummy start2Appearance inspection of special equipmentSpecial equipment3Cockpit inspection of special equipmentSpecial equipmentPower supply station/vehicle4Appearance inspection of avionicsAvionics5Cockpit inspection of avionicsAvionicsPower supply station/vehicle6Oxygen fillingSpecial equipmentOxygen filling station/vehicle7FuelingMachineryFueling station/vehicle8Appearance inspection of ordnanceOrdnance9Cockpit inspection of ordnanceOrdnancePower supply station/vehicle10Cockpit inspection of machineryMachinery11Nitrogen chargingMachineryNitrogen charging station/vehicle12Appearance inspection of airframeMachinery13Engine inspectionMachinery14Unfolding wingsMachineryHydraulic station/vehicle,Power supply station/vehicle15-14+ndArming(nd missiles)OrdnanceArming group15+ndFolding wingsMachineryHydraulic station/vehicle,Power supply station/vehicle16+ndINS alignmentAvionicsINS alignment device,Power supply station/vehicle17+ndDummy finish
令特设、航电、军械、机械依次表示4个机务专业类别;加油站/车、供电站/车、氧气充填站/车、氮气充填站/车、液压设备站/车、惯导对准装置和挂弹组依次表示7类勤务保障设备/组,除供电站/车为共享式设备外,其他均为独占式设备/组;站位空间约束仅涉及座舱空间,因此工序3、5、9、10存在站位空间需求冲突;供给性资源类别按燃油、电源、氧气、氮气和液压依次编号,工序对供给性资源的需求与对相应的勤务保障设备需求相一致,如机翼展开需要液压设备站/车的同时,也需要液压的供应。
在机务保障人员配置方面,单机机组保障模式的配置一般为:特设专业人员1名,航电专业人员1名,军械专业人员3名,机械专业人员3名,合计8人[25]。除此之外,其他两类人机匹配模式下机务保障人员一般根据任务和经验视情配置,如若任务量大,且保障作业工期限定较短的情况下,可多分配保障人员。为实现基于保障任务的机务保障人员定量分配,根据文献[33]中装备保障对占用型资源的需求量预测表明,人力资源数量配置取决于所保障的装备数量、保障活动工时和使用频率等,基于此,定义第c(c∈C)个机组k(k∈Kp)类专业保障人力资源强度系数为
(22)

(23)
在勤务保障设备/组配置方面,给定前5类勤务保障设备对应停机位的覆盖关系如表2所示。
表2勤务保障设备与停机位保障覆盖关系
Table2Reachabilityrelationbetweensupportequipmentandparkingspots

Parking spot No.Set of reachable support equipment No.Ke1Ke2Ke3Ke4Ke51[1][1][1][1][1]2[1][2][1][1][1,2]3[1,2][3][1][1][1,2]4[2][4][1,2][1,2][2,3]5[2][5][2][2][3]6[3][6][2][2][3]7[3,4][7][2,3][2,3][4]8[4][8][3][3][4]9[4,5][9][3,4][3,4][4,5]10[5][10][4][4][5]11[5][11][4][4][5]12[6][12][5][5][6]13[6][13][5][5][6]14[6,7][14][5,6][5,6][7]15[7][15][6][6][7,8]16[7][16][6][6][8]
另外挂弹组可全甲板移动保障,配置数量与军械人员相同。惯导对准装置一般配置较为充足,可完全满足各机需求,因此可在模型中忽略。供给类资源约束为[Lw1,Lw2,…,Lw5]=[9,14,2,4,6]。机务保障人员的甲板转移速度取5 km/h;表2中固定类勤务设备的转移速度取3 km/h,挂弹组转移速度取5 km/h,准备时间和归置相等,且[ut1,ut2,…,ut6]=[20,10,30,30,20,0] s。
在舰载机机群停机布列方面,假定飞机编号与停机位编号相一致,由小到大依次布列,即越早入场飞机停放停机位越小。若初始时刻部分飞机在机库,定义转运入场飞机数量Ne,则初始甲板布列数量为Nd=Nf-Ne,停放在A1至ANd停机位,后续转运入场飞机通过两台升降机并行转运,按入场先后顺序和停机位编号顺序,由前往后,由小到大依次停放,从而可按入场顺序递推入场时间。大机组模式下,以4机作为一个机组单位,并按入场先后顺序分组匹配,以8机为例,先入场4架作为一个机组,后入场4架作为一个机组,以避免机组管理的混乱。
本文以MATLAB 2011a作为实验平台,仿真环境为Windows 7 64位操作系统,Inter(R) Xeon(R) E5-2623 CPU 3.00GHz,内存16G。
4.2 8机机务勤务保障案例仿真
双种群遗传算法参数设置为:种群数量30,变异概率0.005;取保障人员累积转移时间最小化为第2优化目标,即不妨令α=10-5,β=10-8;算法终止条件取调度评价次数10 000,通过SSGS生成一次调度方案记一次调度评价。
图6~图8分别为Cmax、CT和IBV共3个 目标值在种群进化过程中的变化趋势。由图中可以看出,针对机群保障完工时间这一目标,模式A和模式B均收敛较快,模式C直到第60代才收敛,且最终优化结果为模式C<模式A<模式B。这与保障人员的受限程度相符,模式A和模式B下,保障人员仅能在机组范围内调整,可优化空间较小,因而收敛速度快;同时模式A的人力资源更为充足,因此完工时间较模式B短。模式C下没有保障范围的约束,因而能以较少的人数和较短的时间完成机群机务勤务保障作业,尽管在优化搜索上略为费时。经过多次仿真实验均能收敛至该最优值,说明算法具备较强的鲁棒性。在累计转移时间方面,模式A<模式B<模式C, 这也与保障范围的约束相一致,模式C尽管高效,但需要保障人员在甲板上的频繁转移。在保障人员负载均衡性上,3类模式相差不太明显,模式C略优于模式A和模式B,而模式A最差,说明保障范围越不受限,越有助于平衡各专业人员的负载。
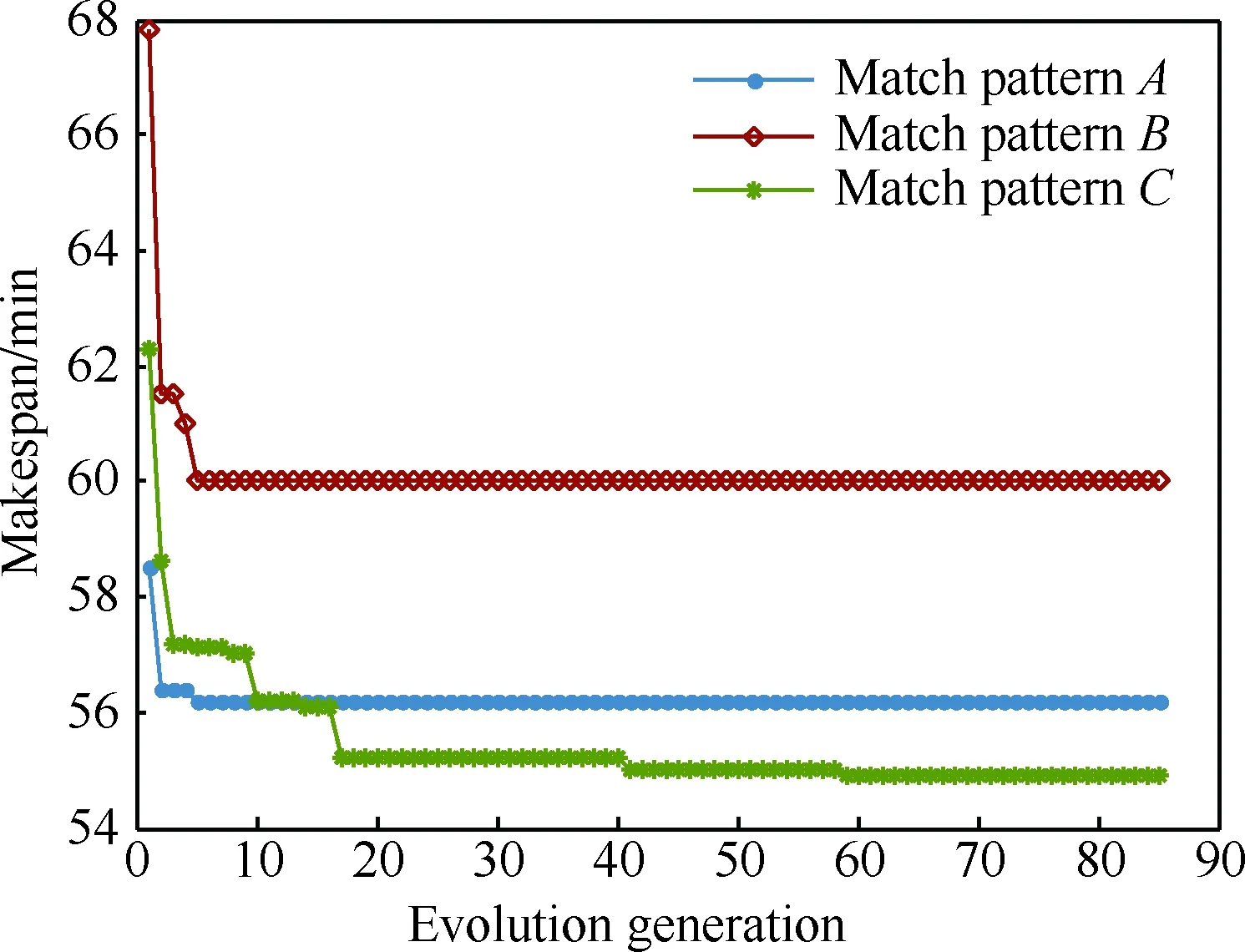
图6 机群保障完工时间变化趋势Fig.6 Variation trends of makespan of multi-aircraft support
图7 保障人员累计转移时间变化趋势Fig.7 Variation trends of cumulative transfer time of support personnel

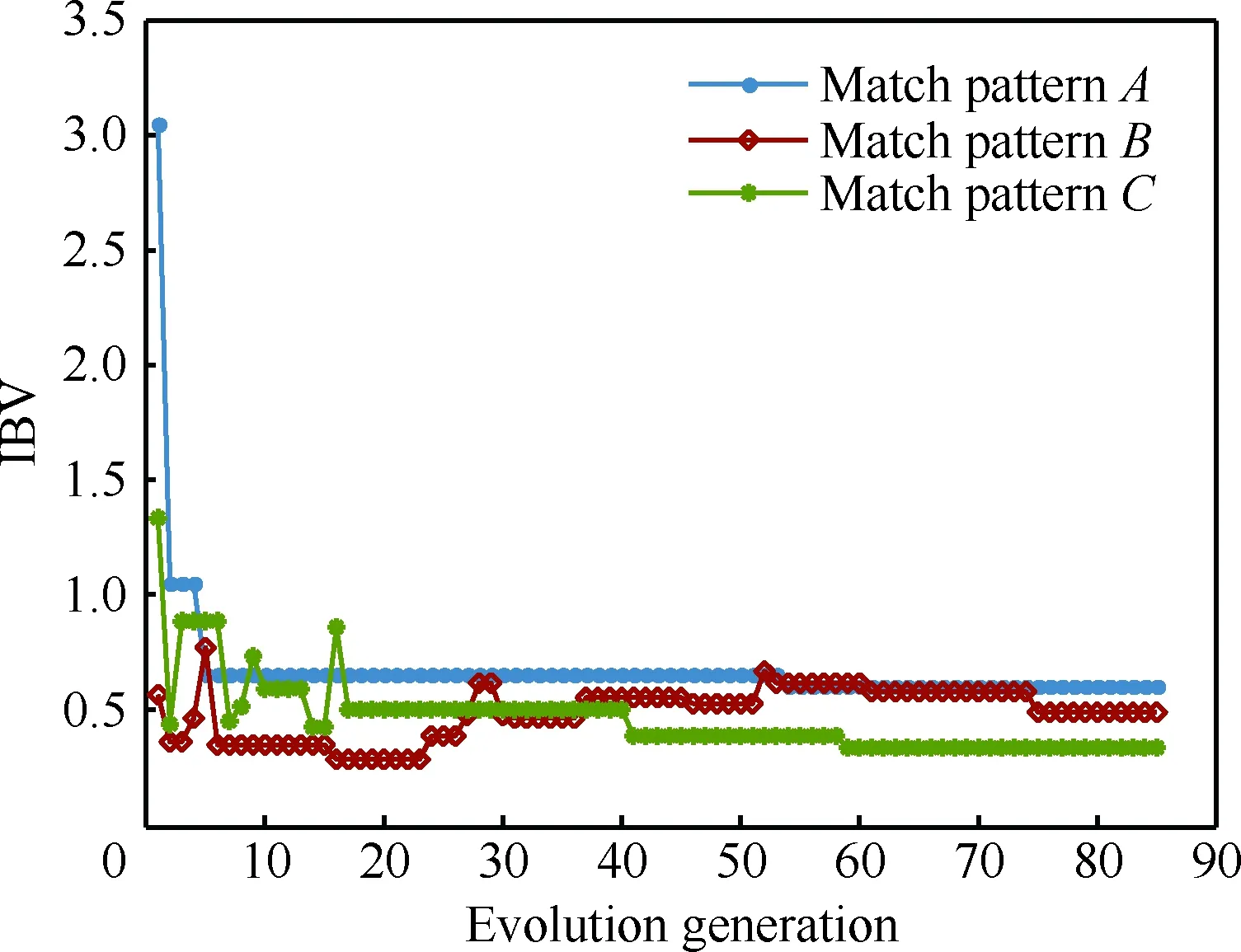
图8 保障人员闲忙比方差和变化趋势Fig.8 Variation trends of IBV of support personnel
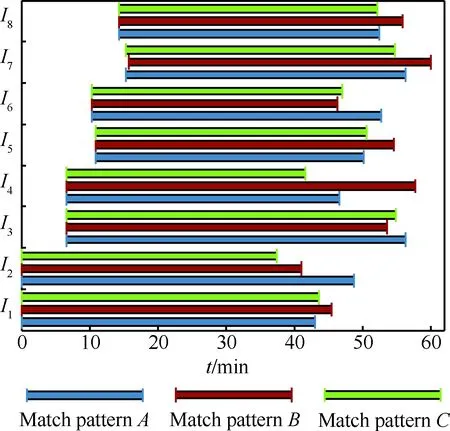
图9 机群机务勤务保障调度甘特图Fig.9 Gantt chart of multi-aircraft maintance and support scheduling
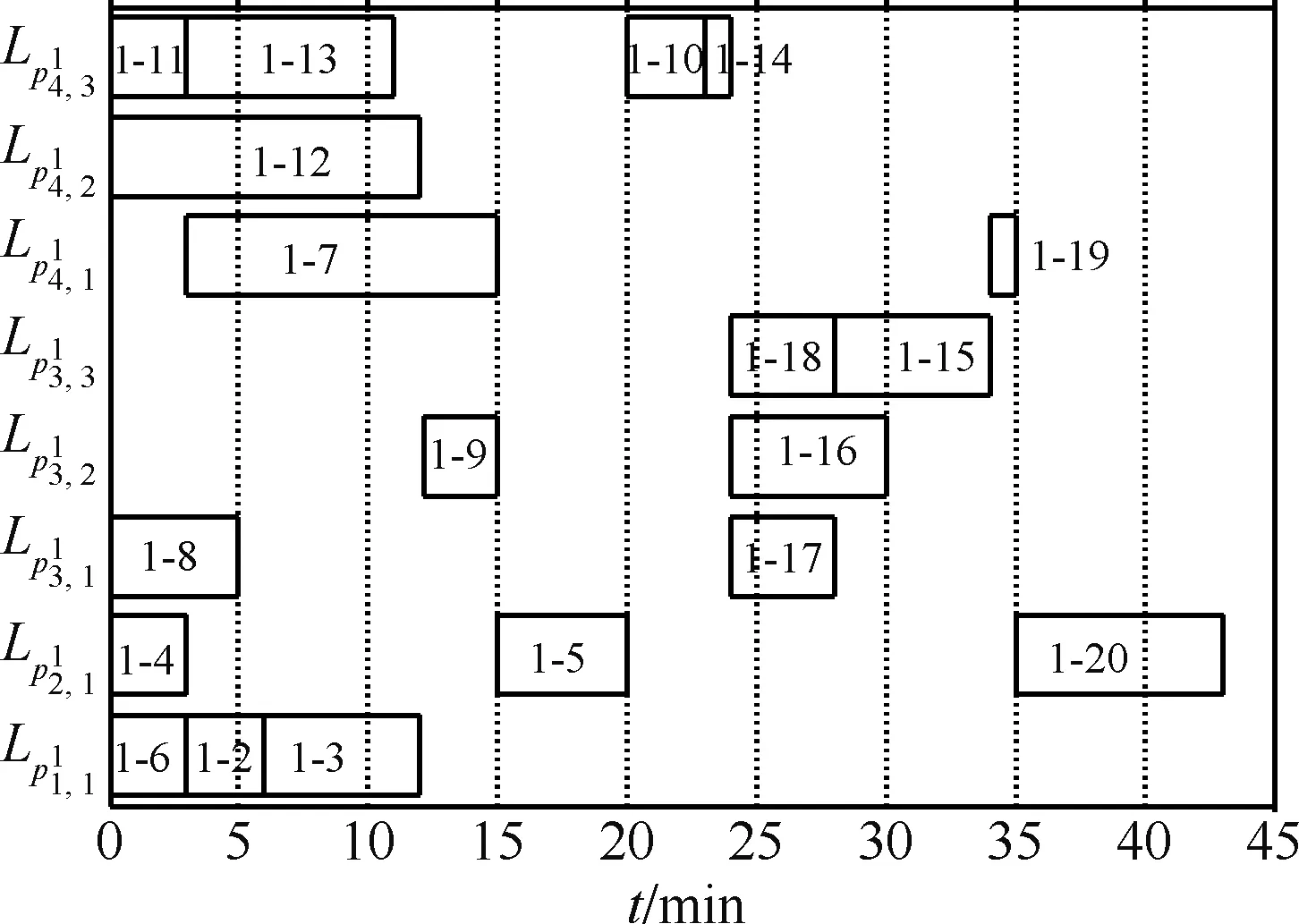
图10 模式A下人员调度甘特图Fig.10 Gantt chart of personnel scheduling in the match pattern A
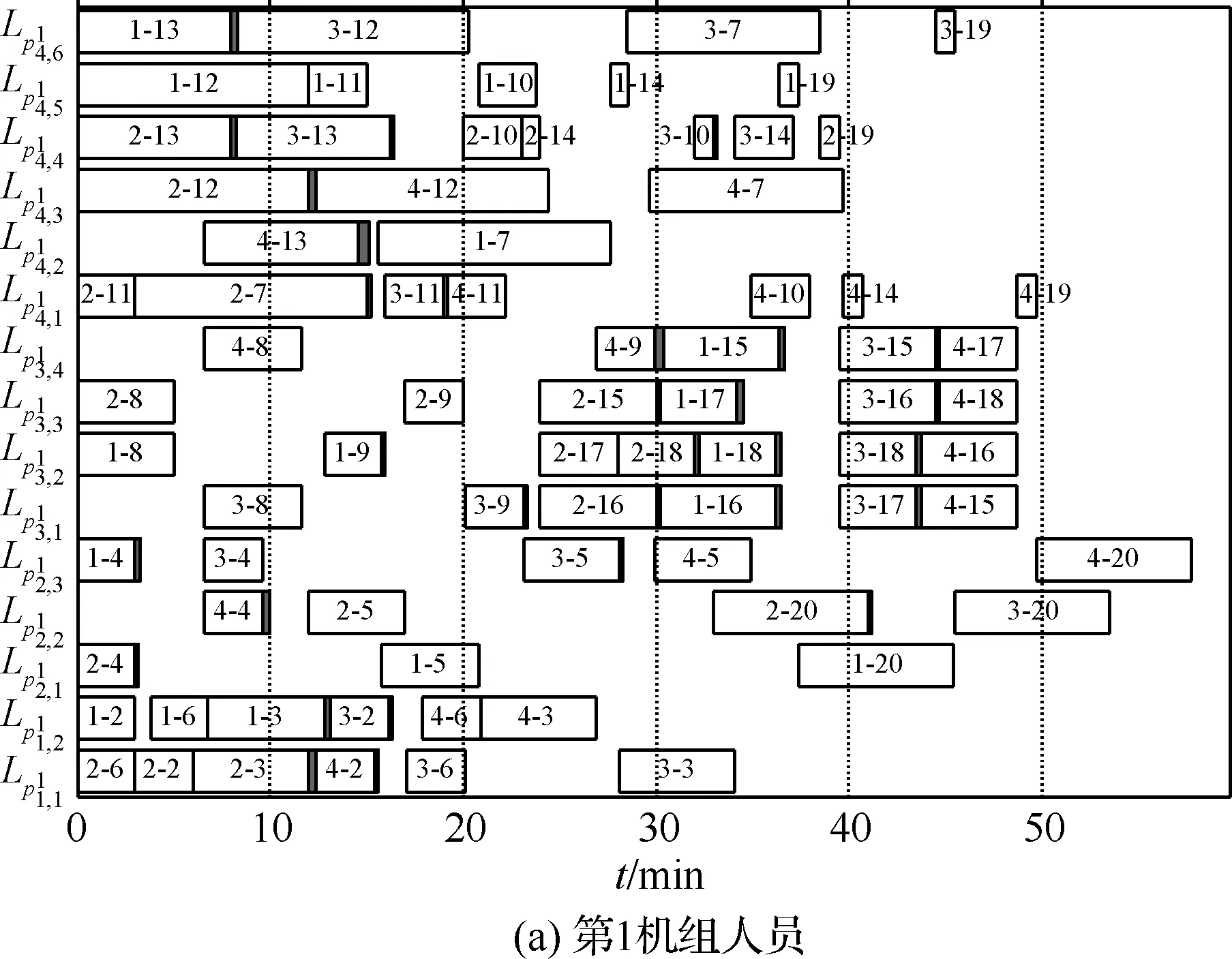
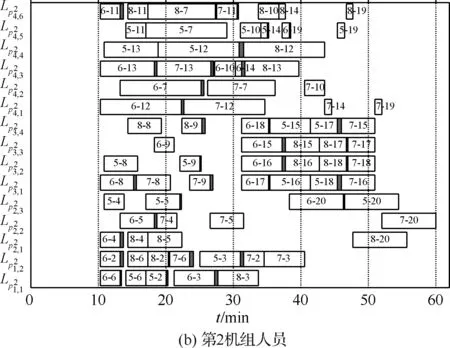
图11 模式B下人员调度甘特图Fig.11 Gantt chart of personnel scheduling in match pattern B
4.3 不同保障规模下人机匹配模式对比
基于4.2节的仿真实验,进一步研究不同机群保障规模和机务保障人力资源强度下,各人机匹配模式对保障优化目标的影响。设置3个层次的机群保障规模:8机、12机和16机。假定不同规模下机群初始均位于机库内,依次转运入场。机务保障人力资源强度取2.5、3.2和3.9,分别代表不同人力资源受限程度。算法参数设置与4.2节相同。
表3为不同机群保障规模、机务保障人力资源强度和人机匹配模式下,独立重复运行30次的调度目标均值,Np表示机务保障人员总数。由表中可知,在纵向上,随着机群调度规模的增加,3个 目标函数值均随之递增;随着保障人力资源强度的增加,Cmax随之递增,IBV随之递减,而在CT方面,模式B部分存在先减后增,而模式C为单调递减。在横向上,同等条件下,模式C的Cmax最优,累计转移时间最长;而在较小人力资源强度下,模式C的IBV优于模式B,而当HS增加,优势则相反。这是由于在以CT为第2优化目标下,当人员充足时,人员分配规则以最小转移时间优先,将造成部分富余的空闲人员闲置,从而使得IBV增加。
若以IBV为第2优化目标,可得出模式B和模式C在不同机群保障规模和机务保障人力资源强度下的调度目标均值如表4所示,模式A的结果,以及模式B和C的Cmax与表3相同,此处不再列出。由表中可知,相对表3的结果,IBV得到较大的优化,且与表3的趋势相反,当人力资源强度较小时,模式B的IBV值优于模式C,而当人力资源充足时,模式C的IBV值优于模式B。
4.4 人机匹配模式的相关影响因素分析
在4.3节的基础上,以8机保障为例,进一步细化保障人员数量Np、转运入场飞机数量Ne和人员转移速度vp等因素对不同人机匹配模式的影响。首先取转运入场飞机数量变化范围为[0,8],保障人力资源强度变化范围为[2.5,4.3],对应模式B和模式C的保障人员数量变化范围为[24, 40],分别以CT和IBV为第2优化目标,以人机匹配模式B和模式C为研究对象,得到不同转运入场飞机数量和保障人员数量条件下的保障调度结果如图13所示。
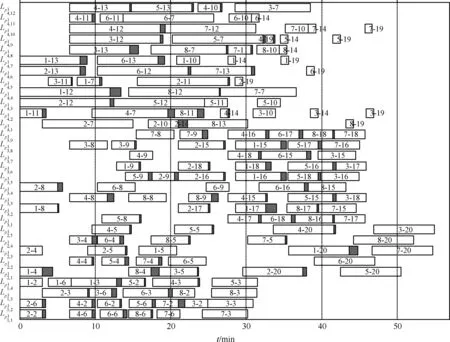
图12 模式C下人员调度甘特图Fig.12 Gantt chart of personnel scheduling in the match pattern C
表3 3种匹配模式对比(以CT为第2优化目标)Table 3 Comparison of the three match patterns (CT is selected as the second objective)
图13(a)和图13(b)分别表示人机匹配模式B和模式C的保障完工时间分布图,由图中可知,随着转运入场飞机数量的递增和保障人员数量的递减,模式B的Cmax呈现阶梯型递增趋势,而模式C的Cmax呈现指数递增趋势,且同等条件下模式C的保障完工时间均优于模式B。
图13(c)和图13(d)表示以CT第2优化目标下,模式B和模式C的CT分布图,显然模式B总体优于模式C。其中模式B下的CT随着Ne和Np的变化呈现规律性的波动,但总体趋势是随着Np的增加而波动性递减;模式C下,CT则是随着Np的增加而单调递减,随着Ne的变化则呈现不规则波动。
表4匹配模式B与C对比(以IBV为第2优化目标)
Table4ComparisonofmatchpatternsBandC(IBVisselectedasthesecondobjective)
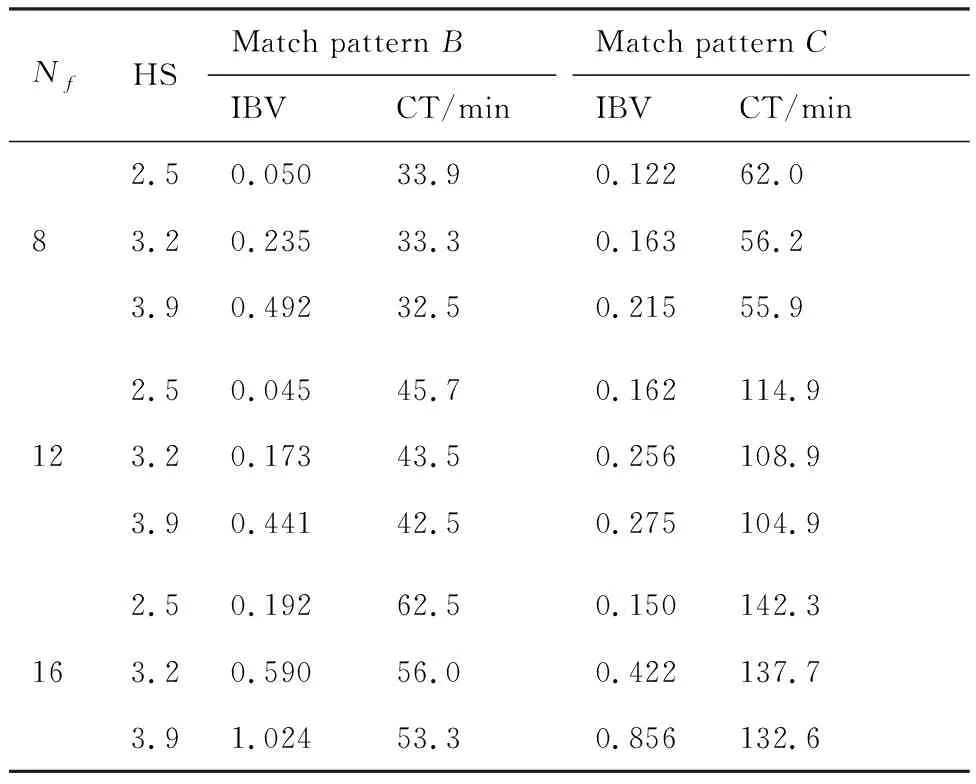
NfHSMatch pattern BMatch pattern CIBVCT/minIBVCT/min2.50.05033.90.12262.083.20.23533.30.16356.23.90.49232.50.21555.92.50.04545.70.162114.9123.20.17343.50.256108.93.90.44142.50.275104.92.50.19262.50.150142.3163.20.59056.00.422137.73.91.02453.30.856132.6
图13(e)和图13(f)表示以IBV第2优化目标下,模式B和模式C的IBV分布图,在保障人员数量规模不大的情况下两类模式的负载均衡性相差不大,且受Ne影响不大;而随着Np的增加两类模式的IBV骤增,且均在Ne=0,Np=40取到最大,从IBV的取值分布来看,模式C总体要优于模式B。
为了更清晰地展示转运入场飞机数量对调度结果的影响,提取人机匹配模式A和Np=24、30、36三种人员配置规模下模式B和模式C随Ne的变化趋势如图14所示。由图可知,随着Ne的增加,模式A、B和C下的Cmax递增趋势各不相同,取同等保障人员数量下模式B和模式C对比,在Ne较小时,两类模式差别不大,而当Ne>3时,差距明显拉开,且保障人员数量越少,该差距越大,这一现象与4.1节的分析相吻合,即当转运入场飞机较多时,可使得各机保障活动相互错开,此时可发挥一体化联合保障模式下分时集中保障的优势,且转运入场飞机数量越多,该优势越明显。因此不难理解,针对保障人数配置Np=64的模式A,在Ne较小时完工时间优于其他两类模式;而随着Ne的递增,该优势逐渐被逼近甚至被超越,当Np=36时的模式C则实现完全地超越,即以最少的人员实现最高效的保障。


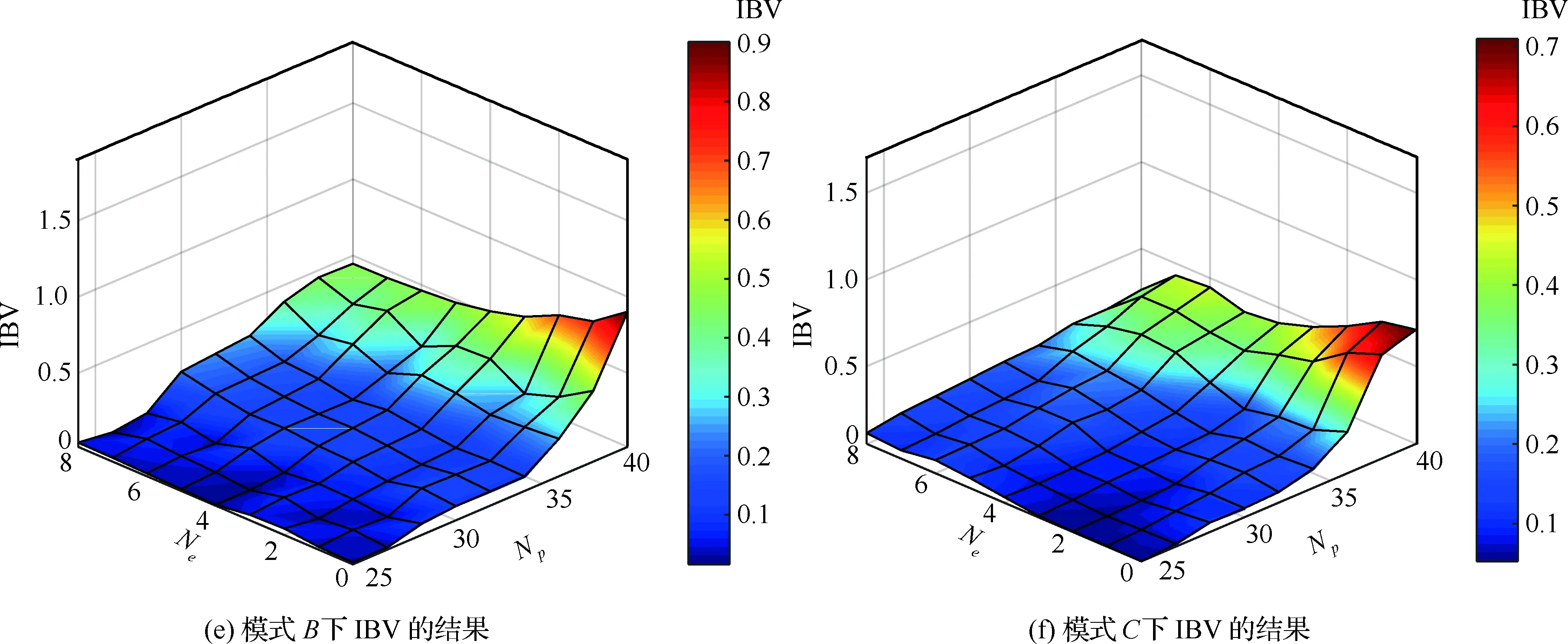
图13 Ne和Np对保障调度结果影响Fig.13 Impact of Ne and Np on the scheduling results
令保障人员的甲板转移速度取值为4 km/h~10 km/h,并考虑忽略甲板转移时间的情况,即令vp=+∞,通过仿真得出甲板转移速度对模式B和C下的Cmax和CT影响趋势如图15所示。显然,随着转移速度的增加,Cmax和CT递减,随着保障人员配置数量的增加,甲板转移速度对Cmax的影响越小,这是由于有充足人员来得及转移保障;当模式C在Np=36时,Cmax已不受转移速度影响均能取到最优值。且无论是Cmax或CT,模式C受转移速度影响均较模式B更大。因此,考虑甲板转移时间有助于实现人力资源受限下的精细化保障调度。
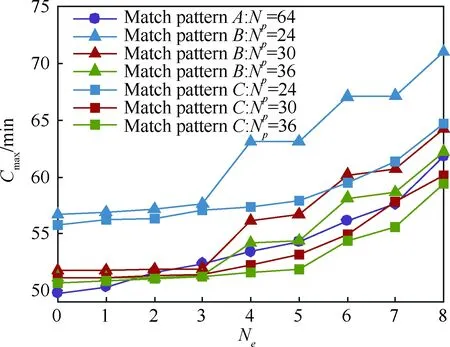
图14 人机匹配模式对比Fig.14 Comparison of match patterns
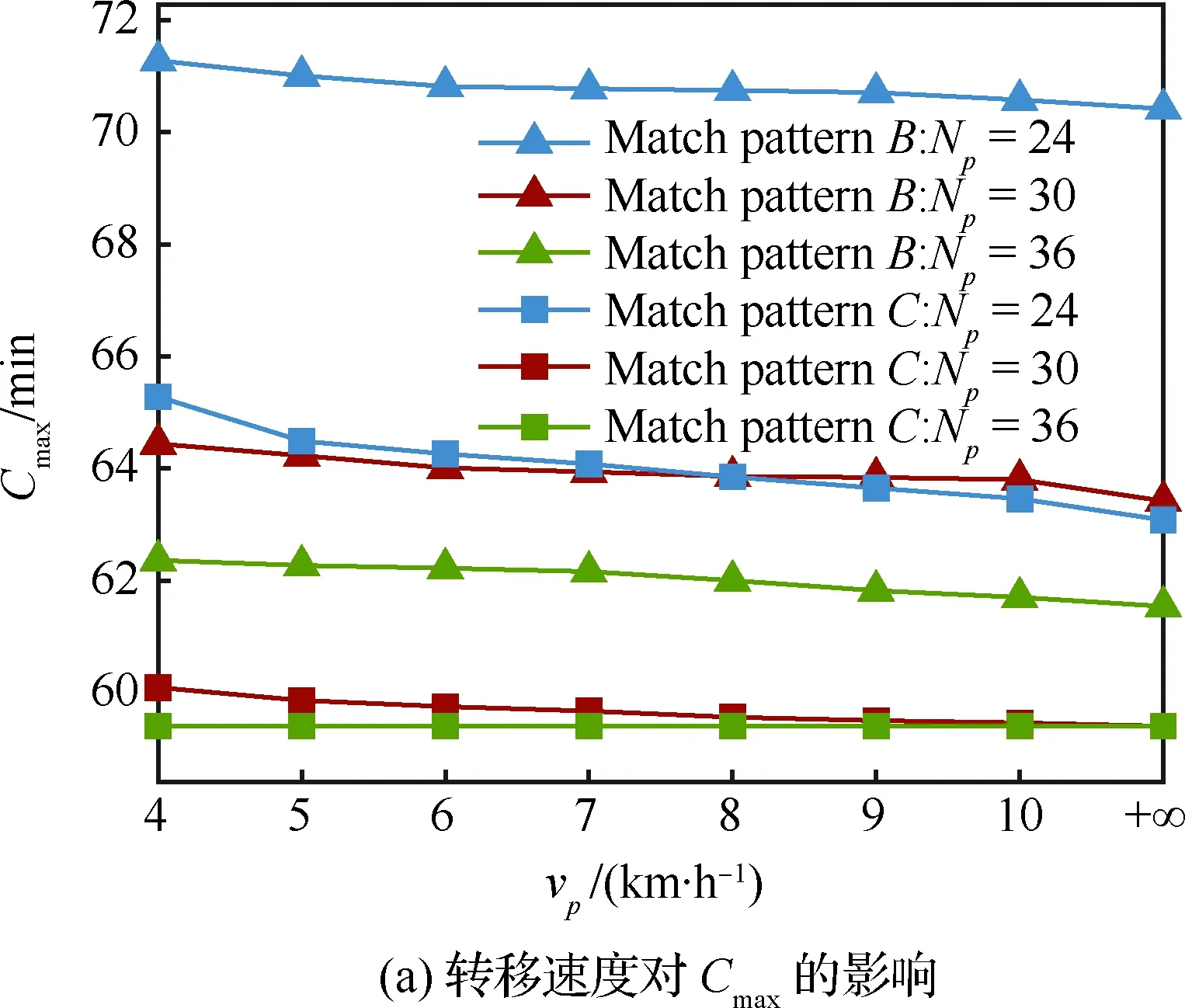
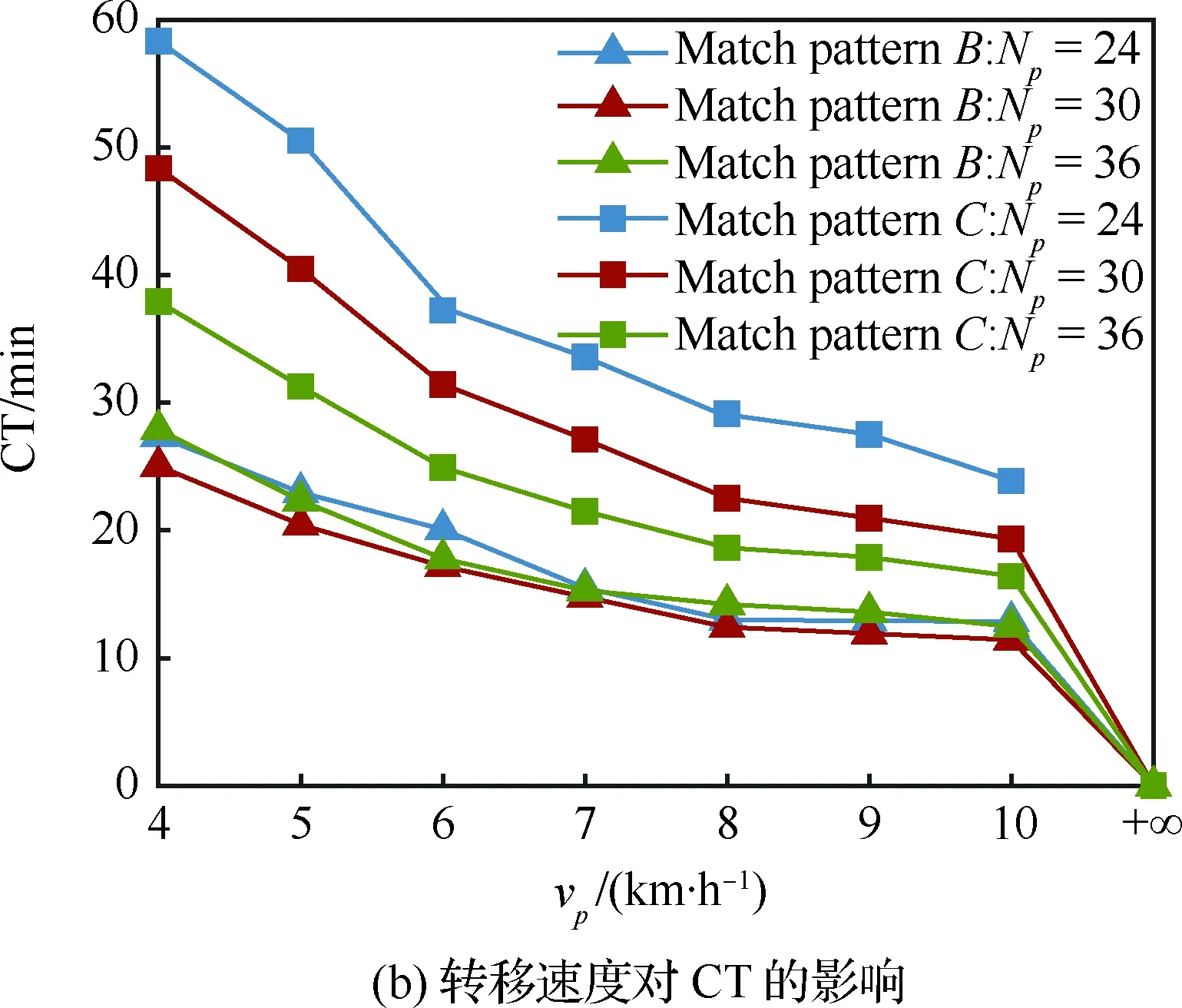
图15 甲板转移速度对调度结果的影响Fig.15 Impact of transfer speed on the scheduling results
5 结 论
1) 针对舰载机机群甲板机务勤务保障调度问题,系统分析国内外机务保障所才采用的单机机组模式、大机组模式和一体化联合保障模式等人机匹配模式,以机群保障作业完工时间、保障人员累积转移时间和闲忙比方差为优化目标,综合考虑各类流程和资源约束,建立了考虑人机匹配模式的舰载机甲板机务勤务保障调度模型及调度优化算法,所提算法可为航母甲板保障调度指挥管理人员制定机务勤务保障方案以及改进人机匹配模式提供理论支撑。
2) 建立的模型可满足各类流程、资源以及转移时间的约束,贴近保障实际;设计的双种群遗传算法可实现机群完工时间、保障人员累计转移时间以及人员负载均衡性等多目标的优化,且具备良好的鲁棒性,所提模型和方法合理有效。
3) 单机机组保障模式便于管理,没有人员转移所带来的风险,但是所需配置保障人员数量较多,人员闲忙比方差和较高,保障灵活性较差。相反,一体化联合保障模式可实现全甲板域同机型灵活保障,可以较少的保障人员数量实现更高效的保障,且随着转移入场飞机数量的增加,该优势更为明显,保障人员的负载均衡性也更优;然而该模式下保障人员甲板转移频率最高,调度优化更为复杂,且各专业人员数量难以定量配置。此外,大机组保障模式的性能则处于这两类模式之间。
4) 在各类人机匹配模式下,各类机务勤务保障资源的配置还需根据保障任务和多类保障目标的需求进行定量配置,今后工作中,在本模型的基础上,将进一步考虑面向保障综合效能的机务勤务保障资源配置优化。
猜你喜欢
科技研究(2021年22期)2021-09-22
家园·建筑与设计(2021年18期)2021-03-07
厦门航空(2020年8期)2020-08-20
新生代(2018年24期)2018-11-13
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
山东工业技术(2018年12期)2018-08-20
环球时报(2018-08-01)2018-08-01
魅力中国(2018年5期)2018-07-30
科技资讯(2017年18期)2017-07-19