浅析侧扫声纳在水下搜寻救助作业中的应用
2019-01-22 04:37杨伟光
珠江水运 2019年21期
关键词:救助
杨伟光
摘 要:本文通过对南海救助局广州救助基地装备的Klein5000v2进行的两例救助案例进行分析,结合案例讨论侧扫声纳与潜水员协同完成落水目标搜寻的方法。可以为今后水下搜寻救助作业提供参考。
关键词:侧扫声纳 救助 打捞
侧扫声纳广泛应用于地质调查、矿物勘探、海洋工程勘探、探测水雷、等领域。作为一种新型的搜寻救助手段,能够有效弥补传统潜水救助中对于水下目标搜索和定位手段的不足,提高了水下应急处置和救助能力。
1.设备介绍
1.1侧扫声纳
侧扫声呐是一种主动声呐系统,侧扫声呐原理是向测量船航向的垂直方向一侧或两侧发射一个水平开角很小(约1度左右),垂直开角很大的短声波脉冲,脉冲到达海底后,根据海底距换能器的远近,被不断反射,并按反射信号的强弱程度画出灰度变化不均的声呐图像,从声呐图像中可以观察出海底地貌变化,是否有地形突起和海底目标。
南海救助局广州救助基地装备的侧扫声纳为Klein5000V2侧扫声纳,该声纳是多个波束动态聚焦的侧扫声纳系统,单侧有5个波束,单侧最大量程150m,最大工作水深500m,拖鱼直径15.2cm,长194cm,重70kg;作业航速2-10kn。脉冲类型(CW/FM),频率455Khz。
1.2侧扫声纳发现物体的能力
一般认为,有2个以上的波束打到物体上,才能够在声纳图像上形成明显的成像。根据侧扫声纳的工作原理,一个声波脉冲的时间为:
(1)
其中:R为声纳系统采集的距离最远的声波反射距离,即声纳系统选择的量程。C为水中声速,一般取1500m/s作为近似值。Tp为一个声波脉冲往返所需要的时间。
在一个声波脉冲时间中,拖鱼走过的距离即为两个声波脉冲之间的距离,此距离为:
(2)
其中:D为两个声波脉冲之间的距离。VS为拖曳速度,近似为拖曳母船速度。V
打到目标物上的声波数量为:
(3)
其中,L为搜寻的目标沿拖鱼前进方向的长度,N为打到目标物上的声波数量。
综合(1)、(2)、(3)式可以得出:
(4)
由于C为水中声音传播的速度,L跟落水目标的大小和形状有关,并非可以人为控制的因素。在能够保持拖鱼姿态稳定的前提下,控制船速处于更低的速度,选择更小的声纳测量量程,有利于发现小目标,但是会降低搜寻的效率,反之亦然。
1.3GPS信标机
如图2所示,Trimble SPS 351信标接收机通过外置GPS天线获取位置信息。室内接收机自带屏幕,可以显示天线所在位置的经纬度信息,连接至声纳图像处理工作站可以同时为声纳数据提供位置信息。在开启码差分GPS定位时,其水平定位精度为0.25mm,未开启码差分GPS定位时,其水平定位精度为1m。
2.传统水下目标搜寻方式
2.1使用钢丝拖缆搜寻目标
如图3所示,在没有有效的水下观测手段之前,常使用钢丝拖缆进行触底拖挂的方式寻找沉底目标。此方法需要两条船配合作业,在船尾固定钢缆两端,控制两船之间的距离,使钢缆能够触底。随后两条船并排向同一个方向航行,当钢缆挂到物体时,潜水员沿钢缆下潜到水底进行探摸。此方法需要两条船舶并排作业,需要在开阔水域环境下开展。且钢缆容易被水底石块和小的地形突起等钩住,造成误判。
2.2潜水员地毯式摸排
在搜索区域相对确定,且面积不大时,常派潜水员下水进行地毯式摸排,潜水员下水后,沿如图4所示的探摸路径进行水下探摸。潜水员下水探摸最为直观,潜水员可以通过探摸物体的轮廓和材质确定探摸到的物体类型。但是此种方法只适用于小面积探摸排查,在大面积搜寻中,进行地毯式摸排工作量具大,难以实现。而且在实际作业中,水流速度会影响潜水员水下活动,横向摸底进行排查对潜水员的体力和意志力是一个具大的挑战。
3.侧扫声纳与潜水员协同配合方法
3.1水下目标测定
通过使用侧扫声纳,可以对搜寻区域进行大面积排查,经过对侧扫声纳图像进行分析,可以筛选出疑似目标点,并对潜水作业区域的水下环境进行初步调查。选择出疑似目标点之后,再制定潜水作业方案,派潜水员下水完成目标探摸和救援作业。通过侧扫声纳和潜水员配合作业,能够有效提高潜水作业安全型和救助效率。
3.2目标定位精度
目标定位精度,指的是侧扫声纳对目标进行定位的准确度范围。分析目标定位精度,可以划定目标物分布区域,为制订潜水员探摸方案制订提供依据。可以用两种方法估算目标定位精度。第一种方法根据经验从产生误差的原因进行分析,侧扫声纳作业时产生的误差主要有三方面因素组成,一是GPS定位误差,经过查阅资料,GPS定位误差为1米,二是使用拖缆长度和角度进行校正的拖鱼位置与实际的拖鱼位置之间的误差,此部分误差跟拖缆的长度、潮、流、船速等相关,三是侧扫声纳图像中的选点位置计算误差,此部分误差跟主要跟声速误差、声纳图像的量程和声纳软件中对于位置的计算方法等相关。
第二种方法对同一目标进行多次测量,选取不同的测量中目标物的位置,通过观察这些位置的分布情况估算本次测量中的误差。
3.3潜水搜寻方案制订
经过侧扫声纳对可疑目标进行标注之后,即可制定潜水搜寻方案。搜寻方案应该设置入水点、划定一个区域,此区域大小应该根据侧扫声纳目标定位精度设置,并且方便潜水员作业。如图5所示,潛水员探摸的扇形区域应覆盖目标区域。划定区域之后,根据水流方向、目标所在点的经纬度位置、计算得到合适的潜水员下水点坐标。将GPS天线放置于潜水员下水点,操纵船舶,使潜水员入水点刚好位于搜索区域上游位置,随后潜水员下水,沿扇形区域进行地毯式摸排。
4.案例分析
4.1某桥断裂汽车落水搜寻救助
由于某桥断裂造成2辆车辆落水,车上1人获救,2人失踪。掉落两辆车辆,该区域河道宽约200米,水深4-12米,搜救现场水流速度约2m/s,桥墩下游水流由于桥墩阻挡,水流湍急。
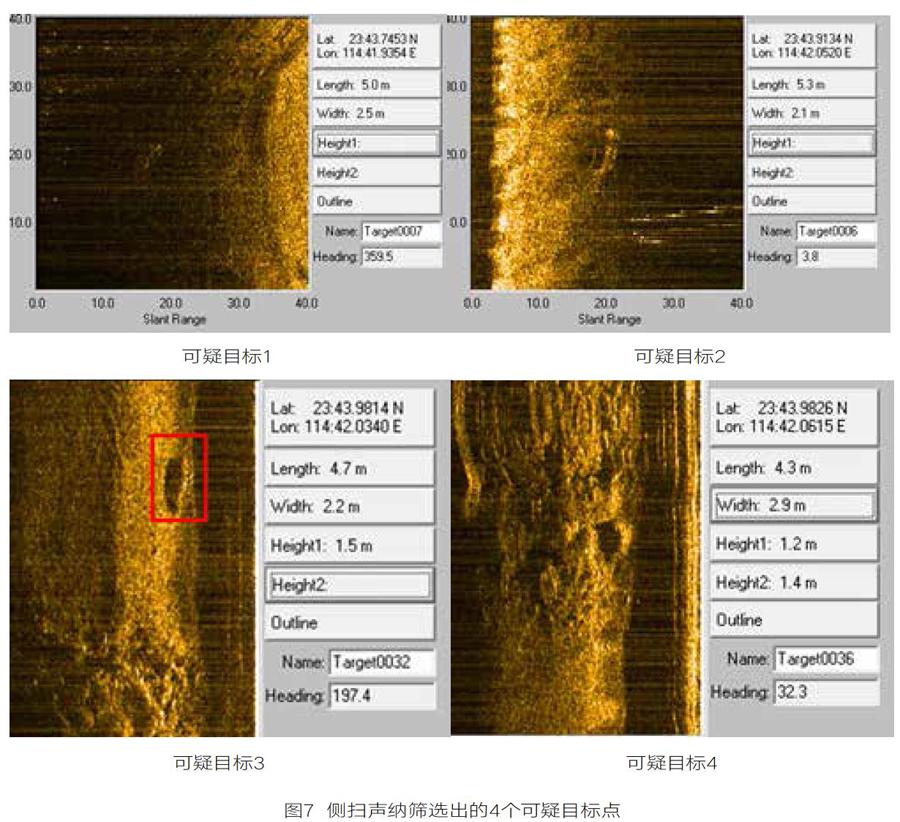
根据现场环境、事发时的监控视频以及幸存者对事发时车辆落水情况的描述。使用侧扫声纳对桥梁下游约1公里范围进行了扫测作业,经过3小时的扫测作业,完成测线长度约约17公里,共计约0.3平方公里水域的扫测(图6),测量过程中船速控制在2.5-3.5节。经过对声纳图像进行分析,共发现可疑目标4个(图7),按照顺序,分别对四个目标进行了排查。其中目标1经确认为大小与车辆近似的石块,目标2和目标3为车辆,由于事发落水的两辆车辆全部找到,未对目标4进行探摸排查。
在现场使用传统钢丝拖缆搜寻目标过程中,钢缆挂到可疑目标2,潜水员顺钢缆进行探摸,顺利完成了目标2车辆的探摸和打捞。由于可疑目标3距离桥墩较近,无法使用钢丝拖缆对可疑目标3进行排查。根据声纳图像定位误差产生的原因估算,目标物的定位误差小于5米。所以在船舶定位之后,划定了半径为10米的扇形搜索区域。由于水流速度太快,在船首部,使用两根绳子分别连接到岸边石栏和断裂的桥墩,使船舶准确定位在扇形搜索区域顶点的上游。经过潜水员下水摸排,顺利实现了对目标3车辆的探摸和打捞。
4.2珠江某掉落船锚搜寻打捞
相比应急救援任务,掉落船锚打捞任务时间更加充裕。在珠江某水域,使用侧扫声纳与潜水员协同作业的方法,完成了对落水船锚的打捞任务。通过侧扫声纳扫测作业,在声纳图像上3次获取该锚链的位置,3个位置之间最大间距为6.5m。划定包含了3个位置的探摸区域之后,潜水员下水,顺利完成了对该锚链的探摸和打捞。
5.总结
随着救助能力转型升级,各种新的科技手段不断的在救助任务中得到应用。通过侧扫声纳的使用,可以实现对水下目标的定位。对声纳图像中的目标形状和尺寸进行筛选,得到的疑似目标有较大的可信度,可以有效提高救助效率和成功率。实际案例证明,在未知风险较多的水下作业中,通过事先对搜寻目标进行声呐成像,通过科学地制定水下探摸方案,可以有效降低潜水员作业风险,提高救助成功概率。
【基金项目:国家重点研发计划(2017YFC0306003)】
参考文献:
[1]夏维.多脉冲侧扫声纳原理及应用浅析[J].珠江水运,2014(15):75-76.
[2]王志光,孙新轩,刘强,熊传梁,徐卫明.侧扫声纳系统在海底障碍物扫测中的应用[J].海洋测绘,2012,32(06):48-50.
[3]王久,周健.側扫声纳和多波束系统在失事沉船扫测中的综合应用[J].中国水运(下半月刊),2010,10(08):35-37.
猜你喜欢
公民与法治(2022年8期)2022-08-12
水上消防(2021年4期)2021-11-05
河南水利年鉴(2020年0期)2020-06-09
公民与法治(2020年6期)2020-05-30
中国民政(2019年12期)2020-01-02
绿色中国(2019年17期)2019-11-26
船舶标准化工程师(2019年4期)2019-07-24
小学生学习指导(低年级)(2018年9期)2018-09-26
河南水利年鉴(2017年0期)2017-05-19
中国卫生(2016年3期)2016-11-12