
基于状态反馈控制的磁悬浮球系统
2019-02-12 10:20刘翊馨钟志贤祁雁英王家园段一戬
桂林理工大学学报 2019年4期
刘翊馨,钟志贤,祁雁英,王家园,段一戬
(桂林理工大学 机械与控制工程学院,广西 桂林 541006)
0 引 言
磁悬浮技术在很多领域有着广泛的应用。磁悬浮球控制系统是研究磁悬浮技术的一个基本平台,已有众多学者对磁悬浮球的控制方法进行了研究[1-4]。张井岗等[5]对磁悬浮球系统进行了分数阶滑膜控制,仿真与实验结果表明该方法有效地解决了滑膜控制方法中易于出现的抖振问题,并且在跟踪性能、鲁棒性等方面优于滑膜控制方法。邵雪卷等[6]提出了一种模糊自适应预测函数的控制方法,结果表明该方法能使小球实现稳定悬浮,且有更好的性能指标。李群明等[7]对磁悬浮球系统进行了H∞控制,设计了一个鲁棒控制器,对磁悬浮球的摄动及外界扰动具有较好的鲁棒性。朱坚民等[8]设计了一种基于神经网络反馈补偿的控制器,极大地提高了对系统的控制精度。陈亚栋等[9]对磁悬浮球系统的二自由度PID控制进行了研究,设计了2-DOF PID控制器,分析表明该控制器能使系统具有较好的抗干扰性。
现代控制理论中的状态反馈控制法不需要全面了解系统的内部构造,仅是通过状态变量就能展现出系统的品质指标和内部特性,相比输出反馈控制方法,状态反馈控制法具有更好的操作性和优越性,因而在电力电子、机械、化工等领域得到广泛应用[10-13]。汤洁等[14]对系统引入误差积分的控制,结果表明系统能达到稳态无静差的预期设定要求。陈亮亮等[15]在研究对电磁轴承的高速飞轮转子系统控制算法时,在其中应用了一个状态反馈模块,仿真和实验结果表明该控制方法能够使飞轮转子系统稳定悬浮,并具有很好的鲁棒性。白龙等[16]设计了一种混合整流全状态反馈控制器,来稳定直流供电输出,与传统方法相比,不仅稳定了电压,还更节省能源。徐和飞等[17]对网络控制系统引入了一个γ-次优H∞静态状态反馈控制器,仿真结果表明使用该控制器的闭环系统是稳定的。李宾等[18]在研究三阶LCL滤波器中引入状态变量反馈,改进观测器极点配置,使整个系统获得最好的性能,并在一台试验样机上验证了该方法的有效性。
鉴于此, 本文将磁悬浮球控制系统作为研究对象, 结合固高GML2001磁悬浮球实验台,运用极点配置法设计出一种基于跟踪的状态反馈控制器。
1 磁悬浮球系统的组成及数学模型
磁悬浮球控制系统由电磁铁绕组、激光位移传感器、功率放大器、控制器及一个小钢球组成。系统结构如图1所示。

图1 磁悬浮系统结构图Fig.1 Structure of magnetic system
在理想状态下,小球竖直方向的运动方程描述为
(1)
式中:x—钢球质心与电磁铁磁极之间的气隙长度(以磁极面为零点),m;m—钢球的质量,kg;F(i,x)—电磁吸力,N;i—电磁铁绕组电流,A;g—重力加速度, m/s2。
当钢球受到向上的电磁力与自身的重力相等时,钢球处于平衡状态,表示为
mg+F(i0,x0)=0,
(2)
用微分方程来描述系统,则有

(3)
将式(3)进行拉普拉斯变换,有
(4)
把边界方程mg=-K(i0/x0)2代入式(4)得到系统的开环传递函数
(5)
定义系统对象输出量x反映出的输出电压为Uout, 其同时也是传感器后处理电路的输出电压,则该系统的控制对象模型可表示为
(6)
式中: 系数A=i0/2g, 系数B=i0/x0。将表1中的部分参数值代入式(6),有
(7)

表1 磁悬浮球主要物理参数值Table 1 Main physical parameters of the maglev ball
2 状态反馈控制器设计
将状态反馈增益矩阵K引入该系统,闭环系统状态空间模型为

(8)
其传递函数为
Gk(s)=C[sI-(A-BK)]-1B。
(9)
根据预期性能, 引入合适的超调量和调节时间, 采用Matlab仿真得到系统的阶跃响应曲线, 如图2所示。 系统出现了较大的稳态误差, 且不能及时跟踪阶跃输入。 为改善控制器的跟踪性能, 选择采用偏差积分来抑制或消除单输入单输出系统的稳态误差。 向原系统引入一个偏差向量积分q(t),有:

图2 初定程序的状态反馈阶跃响应曲线Fig.2 State feedback step response curve of initial program

(10)
式中:K1、K2为状态反馈矩阵;K1x是原系统的状态反馈;K2q是为了提高系统稳态性能指标而加上的偏差向量积分控制。 这是一个由被控对象的状态反馈和偏差向量组成的复合控制, 也相当于是一个比例积分控制器。 将q作为附加状态向量后, 此时整个系统状态空间模型为式(11), 结构见图3。

图3 基于跟踪的状态反馈结构图Fig.3 Tracking-based state feedback structure diagram

(11)
所设计控制器的闭环系统传递函数为

f(s)=s[sI-(A-BK1)]
=s3+k1bb21s2+(k1ab21a12-a21a12)s,
(13)
其中,a3=1,a2=k1bb21,a1=k1ab21a12-a21a12,a0=0。
根据Routh判据,若要使系统稳定,则需ai>0(i=1,2,3), 且c13>0。
即
(14)
解得
(15)
3 仿真与实验分析


图4 系统状态反馈控制器的仿真Fig.4 Simulation of system state feedback controller
图5所示为状态反馈控制器与PID控制器阶跃响应的对比,建立的状态反馈仿真控制器与PID仿真控制器均能使系统趋于稳定状态,能跟上阶跃输入,但在应用状态反馈控制器时,并无明显稳态误差。
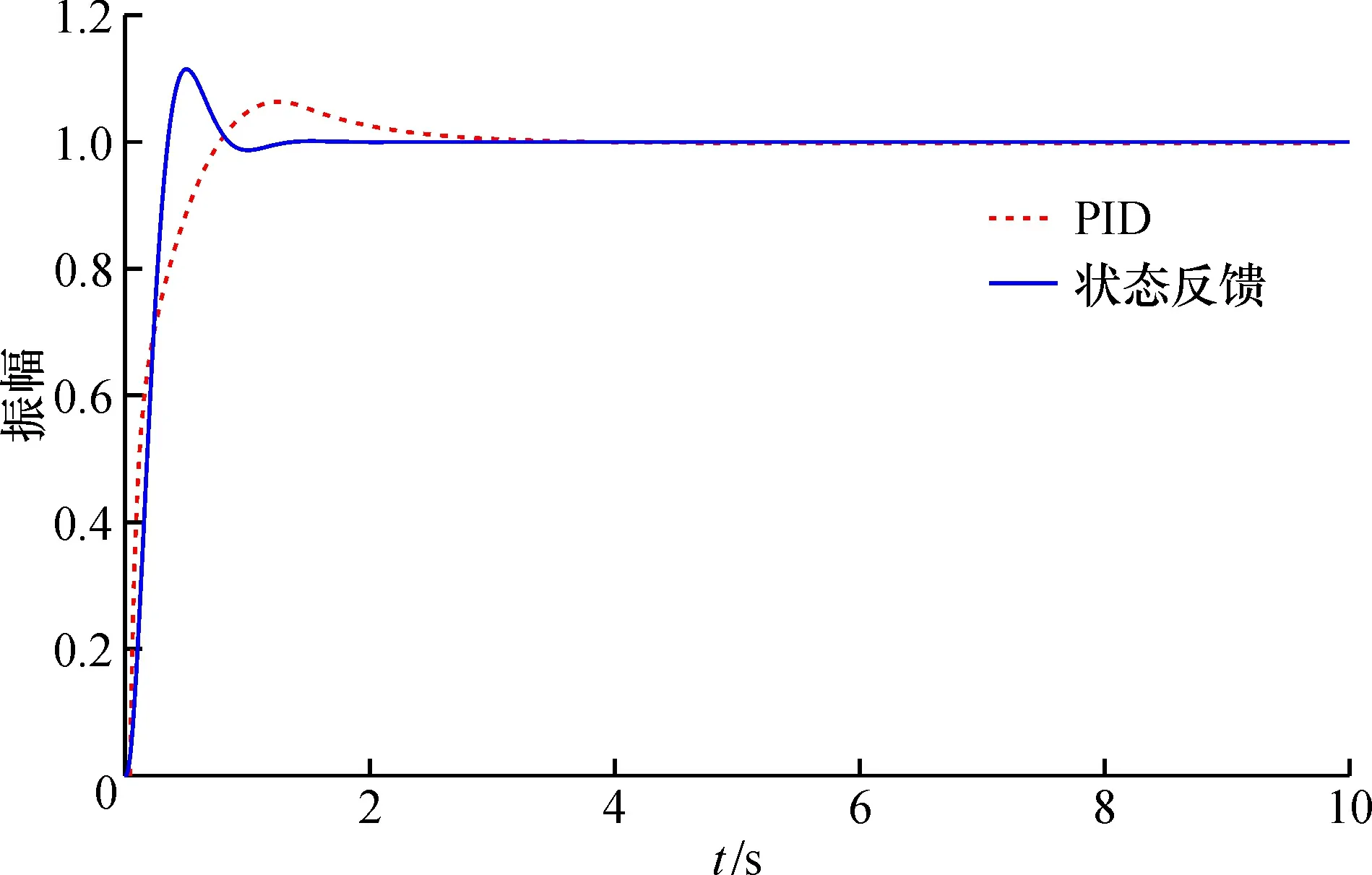
图5 状态反馈控制器与PID程序阶跃响应曲线Fig.5 Step response curves of PID controller program and state feedback
在Simulink中建立磁悬浮系统的状态反馈控制器如图6所示,钢球处于稳定悬浮状态下的输出波形如图7所示,钢球在系统稳定时的工作状态见图8。
由图7可知,位移标定基本稳定在6×10-5mm处,根据该系统电压、位移和位置标定值的比例关系,有6×10-5/(-0.03/5)=-0.01,与最初的位移标定相等,即小球达到实验预期目标。
根据Routh判据, 需同时满足式(15)中2个关系式系统才趋于稳定状态。k1a的值为356.94>256.66, 同时a1、a2和a3均大于0。综上所述,此时磁悬浮小球系统符合ts<2 s,δp≤15%, 小球悬浮于10 mm处的预期性能指标。 在实际的操作中, 状态反馈增益矩阵K值过大反而会影响悬浮的稳态指标。 故在选择K值的时候, 既要考虑系统的性能问题, 也要综合考虑系统的现实操作问题。

图6 状态反馈控制器的实时控制程序Fig.6 Real-time control program of state feedback controller
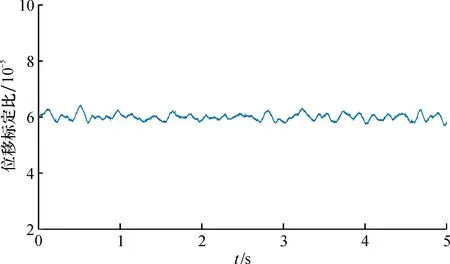
图7 状态反馈控制程序实时控制输出波形图Fig.7 Real-time control of output waveform by state feedback control program

图8 钢球在系统稳定时的悬浮图Fig.8 Maglev ball in suspension
由于状态反馈控制器与PID控制器的两种控制方法位置标定值不同而缺乏可比性,为了提高对比实验的科学性,将两种方法所得的位移标定比取对数进行比较,结果如图9所示。PID控制与状态反馈控制相比,波动幅度相对较大,仿真也表明,PID控制对系统动态性能的改善较为困难,而进行状态反馈控制时,能在减小了系统稳态误差及反馈矩阵参数上下改变的同时保持系统趋于稳定。

图9 状态反馈控制与PID控制位移标定对数比较Fig.9 Logarithmic diagram comparison between displacement calibration of PID control and state feedback control
4 结 论
本文建立了磁悬浮系统的数学模型,提出了一种基于跟踪的状态反馈控制方法, 设计出相应的控制器, 能使系统的动态性能指标达到预期设定, 且稳态误差小。 实验表明,对于该系统, 提出的控制方法易于实现。 将设计的状态反馈控制器与PID控制器进行仿真实验对比发现, PID控制需要反复整定试凑参数, 直至出现满意的响应结果, 以此来确定控制的参数, 而状态反馈控制能够较为容易地调试出需要的参数, 对系统的适应性相对较好。 但是为了减少状态反馈控制器的稳态误差而加入积分器时, 其响应速度变慢。 对于此类问题, 可以在之后的研究中根据闭环系统过渡矩阵过程要求,按极点配置法确定引入积分控制后的状态反馈增益矩阵进行分析与仿真实验。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
中国特种设备安全(2022年1期)2022-04-26
小学科学(学生版)(2021年4期)2021-07-23
昆钢科技(2021年2期)2021-07-22
哈尔滨轴承(2020年4期)2020-03-17
天津教育·下(2018年9期)2018-07-13
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
自动化仪表(2017年8期)2017-08-30
广西电力(2016年4期)2016-07-10
