定位导航空投救援无人机的设计
2019-02-18 02:15马国梁卢浩东雷国伟
无线电工程 2019年3期
马国梁,卢浩东,舒 强,雷国伟, 3
(1.集美大学 理学院,福建 厦门 361021;2.宁德时代新能源科技股份有限公司,福建 宁德 352000;3.北京邮电大学 电子工程学院,北京 100876)
0 引言
近年来,随着国内外对四轴飞行器的研究,四轴飞行器已经家喻户晓。就农用无人机而言,美国、日本和韩国均有所应用,我国起步较晚,以使用无人机进行灭蚊行动为开始在农业方面有所应用[1]。在地测遥感方面,无人机可以实现比较高清图像、数据的获取和传输[2]。此外无人机在公共安全方面已经有了一定的应用,反恐、边防、消防和海事等领域很有应用前景[3]。在国内,小型无人机大部分现阶段用于航拍活动,以及被航模爱好者用于个别任务。在国外,美国发展小型无人机用于军事装备,加强军队的作战能力,并且在21世纪初的战争中大量使用无人机,以减免伤亡[4]。无人机具有可执行高风险、具有人类生理特点的任务,而且成本不高,可以完成的任务类型也多,不容易被发现等优点[5];同时也有生存率、可靠性等方面的缺点,由于无人机体型轻小,易受风力影响,有学者提出了SFA飞行方法来降低事故[6]。
四旋翼无人机的研究,跨越多个学科,在现实应用中有十分重要的意义。对无人机的研究主要围绕4个方面:① 如何设计动力装置及能源优化,以提高其续航能力[7];② 研制高性能的飞行控制器[8],研究高效的飞行控制算法[9],提高飞行过程中的稳定性;③ 借助导航和各种传感器,增强飞行的安全与避障功能[10];④ 规模化、实用化研究。本文的主要工作就是研发一款四旋翼飞行器,能够实现自动空投救援等功能。通过软件调试、硬件设计,制作出一个较为轻便的有救援意义的四轴飞行器系统。不仅能够实现飞行器的正常飞行和携带物资,还有助于各种灾后救援行动,以及野外考察救援等。尤其对灾害系数高、状况不明的环境更加灵活,减少伤亡。
1 飞行器结构原理
与传统飞行器相比,其结构比较别致,是一个不管横纵都是对称的、按X字形呈90°依次排列的交叉结构。飞行器在X字形尾端有4个电机和螺旋桨,通过平衡4个电机带动螺旋桨所产生的拉力实现稳定悬停和飞行等一系列动作[11]。四轴飞行器有4个输入力与多个传感器,被单片机实时控制,能在短时间内静态飞行。
四轴X型结构实际上是人们熟悉的笛卡尔坐标系,如图1所示,对应数学上的X轴和Y轴。正如前面所讲,四轴有4个螺旋桨,每个轴的终端有2个螺旋桨,旋转方向相同,而相邻的旋转方向必须相反。顺时针旋转的螺旋桨叫反桨,逆时针旋转的叫正桨。
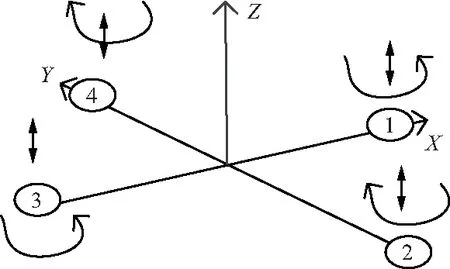
图1 笛卡尔坐标系
根据经典物理学受力分析可知,同时增加四旋翼输出功率,旋翼总的拉力增大,足以克服整机的重量时,无人机将会被拉力拉起,反之,则在重力作用下落地。而要使无人机进入悬停状态,只要控制浆的拉力和重力之间的平衡即可。在此过程中垂直起降的关键在于同时驱动电机。当4个电机带动螺旋桨转动转速相同时,螺旋桨旋转上带来的一个相反作用力将抵消,避免飞行器原地不停转圈。
2 外设模块
外设模块主要由负责空投救援物资的空投模块h和负责控制与导航作用的飞控模块2部分组成。
2.1 空投模块
2.1.1 电路设计
设计思路:模块能够接收到人体信号,并处理信号,做出空投动作。在这个过程中,考虑到无人机不易被发现,在空投时会伴随警报,一则躲避重物,二则寻找机会空投。设计原理如图2所示。

图2 空投模块电路设计原理
空投模块主要的组成部件包括:
① STC89C52单片机:自动门的中心处理器,检测红外模块信号发出相应指令,指挥步进电机、LED指示灯及蜂鸣器等工作;
② 热释电红外模块:负责探测外部红外辐射,当人进入其辐射范围时,就输出高电平,由单片机接收;
③ 步进电机:提供转动空投箱的主动力,控制空投箱转动固定角度;
④ LED指示灯:多种闪烁方式提示空投的工作状态;
⑤ 蜂鸣器:进行空投时伴随响声,起警示作用;
⑥ 2个外部按钮:控制空投箱手动投放或自动投放。
根据图2在PCB板绘图软件中绘制出电路图如图3所示。调整大小打印在热转印纸上,切割合适大小的铜板,将电路转印到铜板上,通电腐蚀之后,用打孔机打孔。完成PCB板之后,焊接相应器件,再将该器件与烧写后的单片机相接,最后上电测试,观察能否达到预期的效果。
2.1.2 热释电红外传感器
热释电红外探头具有以下优点:工作功率小、不容易受干扰,而且很小很隐蔽,最重要的是便宜。热释电红外传感器的工作原理:当有人在传感器的感应范围内时,传感器传出3.3 V的高电平,当人离开传感器范围时,呈现低电平,以此来给处理器提供有人或者无人的信号[12-13]。传感器的结构如图4所示。热释电红外传感器对人体的辐射信号最为敏感。

图3 空投模块PCB电路

图4 热释红外线传感器内部结构与电路
2.1.3 步进电机
本模块中,单片机输出低电平有效,所以在接入步进电机之前,还需要电机驱动—ULN2003[14],步进电机电路原理如图5所示。电机驱动的工作原理:接收脉冲信号后,分配信号,放大功率,输出给步进电机,步进电机工作带动负载。在图5中,可知步进电机由四相电平控制,对四相的电平组合时序,就可以驱动步进电机工作。
该步进电机的驱动电压为12 V,步进角为7.5°,一圈360°,需要48个脉冲完成。电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。采用51单片机驱动ULN2003的方法进行驱动。ULN2003的驱动直接用单片机系统的5 V电压,可能力矩不是很大,可自行加大驱动电压到12 V。

图5 步进电机电路原理
2.2 飞行控制模块
2.2.1 飞控与安装
目前,市面上可供使用的飞控器如表1所示。
设计中选用APM作为飞行控制器。APM由控制和导航2个PID级调控,即2级搭配解析信号,完成控制电机的功能[15]。震动对于飞控影响较大,因此需要搭配减震板来减少震动带来的影响。APM板载的气压计对温度敏感,所以气压计上覆盖黑色海面遮光,也避免气流对气压计的影响。信号接收模块固定在飞控旁边,连接APM输入端作为接收遥控器信号的天线。电调焊接完成后连接线接入APM输出端。固定完成后检查牢固性。
表1 各种飞控对比结果
2.2.2 Mission Planner安装与调试
APM飞控自驾仪通常是通过地面站Mission Planner来进行设置、调试、安装固件等[16]。首先是固件的刷入,通常情况下已经有基础固件在内。建议安装中文版Mission Planner,打开地面站,连接开关在主页的右上角。升级安装固件有手动模式和向导模式,向导模式会一步一步指引安装,在软件中找到“安装固件”,软件会在连接网络的情况下,从网上下载最新的固件。选择与自身无人机机型吻合的样式下载,完成后连接,接下来的步骤自动完成,等待即可。固件刷写完成后就进行调试,最主要的调试步骤是遥控器校准的调试、加速度计校准的调试以及罗盘校准的调试。
3 系统集成与试验结果
3.1 硬件
硬件系统由3部分构成:飞机机架、动力系统以及外设。电调板在机架中有很重要的地位,如果把机架比作骨干,那么电调就是血管。电调板的焊接如图6所示。

图6 电调焊接图
首先,飞控搭载传感器,配合减震板,用螺丝固定,调整线束固定。注意检查稳定性是否牢固。对于动力系统,通俗地讲就是电池和电机的匹配。电机一般采用无刷直流电机,选用4个适配的电调,以及选用能量高密的锂电池比较适合。
然后,将外设中的GPS连接好线束,如图7所示,底座用十字栓固定。GPS模块对于APM而言是一个外置罗盘,可以辅助飞行器进行定位。在罗盘校准时也需要校准外置罗盘。GPS在无人机上的作用体现在通过GPS返航。当GPS连接好之后,GPS会搜索卫星信号。定位下起飞点,选择GPS返航,飞行器会升高,落回之前标记的点。

图7 GPS外设模块
外设模块的空投装置由2个热释电红外传感器连接单片机,作为信号出入,步进电机和LED灯连接单片机输出端,步进电机作空投箱,发光二极管作为指示灯。释放空投的同时伴随蜂鸣器响声。
3.2 软件
软件系统由2部分构成:空投模块外设的51单片机编程以及APM飞控的调试,空投模块程序主要了解步进电机如何使用,对步进电机4个输入口编码,可用0x80,0x40,0x20,0x10编码,根据电机性能,这4个一次循环,则转动一周,反向运行,则是对4个逆向再运行一次。APM飞控的调试主要通过地面站调试。校准遥控器、加速度计和罗盘等功能的调试完成后,即在软件部分准备完成。
3.3 实验结果
3.3.1 实验演示
无人机在空中平稳飞行时的图片如图8所示,在空中触发空投瞬间的图片如图9所示,图中方框标出的为空投箱,此时为空投发生瞬间捕捉的照片。

图8 飞行工作图

图9 飞行投掷瞬间
3.3.2 空投效率
空投效率在本次实验中,定义为符合本次实验范围内的空投释放的成功率。感应到人,释放空投,即算作空投成功。同时在空投过程中,会伴随警报。空投模块主要依赖于热释电红外传感器的工作情况。对人的效果来说,人相对于传感器的运动方向也有影响。若以传感器为圆心,径向移动时最不敏感,垂直于传感器运动最为敏感,这于飞行器实际情况相适应。经过多次模拟空投测试得出的空投适应高度图如图10所示。

图10 飞行器空投触发率与人距离关系曲线
从图10可知,当前灵敏度的传感器,对于空投有效范围约在2~3 m,是最容易触发空投的,4 m之外的人偶尔会触发空投,在报警的辅助下,也能够完成物资的投放。当距离很短时,触发空投的情况不稳定,由于受感应面过大,有时传感器会认为该信号不是正确信号。必须说明的是,设计中使用的传感器受到本身品质、调节的灵敏度以及安装位置的影响,加上实验场地的光线等外部因素,图10数据仅供参考。
4 结束语
本文设计基于51单片机实现四旋翼无人飞行器的控制,使飞行器在空中可以实现垂直起降、悬停飞行、变向飞行以及GPS返航。在遇到人时,会自动感应并进行空投任务,任务过程中伴随警报以便提醒人群,任务执行结束后警报解除。该成果已用于地震等灾后救援,基本符合预期目标。设计还有些需要改进的地方,飞行器由2个系统组成,对飞机负担较大,影响飞行的稳定性,也无法实现大型空投运输。此外,飞行器受天气影响较大,空投准确率不够稳定。
猜你喜欢
电脑报(2022年4期)2022-02-07
软件导刊(2021年10期)2021-10-28
民用飞机设计与研究(2019年2期)2019-08-05
科技创新导报(2017年1期)2017-03-21
中国信息化周报(2015年14期)2015-06-01
电脑爱好者(2015年7期)2015-04-09
现代计算机(2009年9期)2009-12-02
现代计算机(2009年5期)2009-08-27
现代计算机(2009年6期)2009-08-22
现代计算机(2009年7期)2009-07-29