基于Simulink的SVPWM控制方法仿真
2019-02-26 05:04吕莹林联伟
汽车零部件 2019年1期
吕莹,林联伟
(株洲易力达机电有限公司,湖南株洲 412000)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一种采用高能永磁体为转子的电机,具有结构简单、尺寸灵活、响应快、效率高、便于控制的优点,因此得到广泛应用[1]。随着电力电子技术、微处理器技术的推广,PMSM的控制方式普遍采用矢量控制(Vector Control),这种控制方式需要进行坐标变换。SVPWM也是矢量控制的一种,通过在电流和速度双闭环中生成SVPWM控制信号实现对电机控制[2]。但由于在该算法中需要进行几次坐标变换,不利于控制系统中的参数调整和测试验证。本文作者使用一种简化的PMSM控制系统,减少坐标变换,并使用MATLAB/Simulink进行仿真测试,便于算法优化及参数调整。
1 永磁同步电机数学模型
当三相绕组通入对称的正弦波三相电流,电机内部产生旋转磁场,该磁场和转子的磁场相互作用,从而使电机旋转[3]。
在坐标系中观察,若将PMSM转子固定在d-q旋转坐标系上,转子与q轴重合,d轴与q轴垂直,则PMSM的定子转矩方程为
(1)
PMSM的定子电压方程为
(2)
式中:ud、uq为定子电压在d-q轴的电压分量;id、iq为定子电流在d-q轴的电流分量;Rs为三相定子绕组相电阻;ψd、ψq为定子磁链在d-q轴磁链分量;ωe为转子机械角速度。
同步旋转坐标系下定子磁链方程为
(3)
式中:Ld、Lq为定子电感在d-q轴的分量,文中设定为Ld=Lq。
得到定子电压方程为
ud=Rsid+Ldpid-ωeLqiq
uq=Rsiq+Lqpiq+ωe(Lqiq+ψf)
(4)
2 空间矢量控制基本原理
在永磁同步电动机中,矢量控制是一种高效的控制方式,而且是目前应用较为广泛的控制方式。其基本思想是模拟直流电机的控制方式来控制永磁同步电机[4]。为简化自然坐标系下三相PMSM的数学模型,选择合适的坐标变换对数学模型进行降阶和解耦变换[5-6]。通常采用静止坐标变换(Clark变换)和同步旋转坐标变换(Park变换),其关系如图1所示。
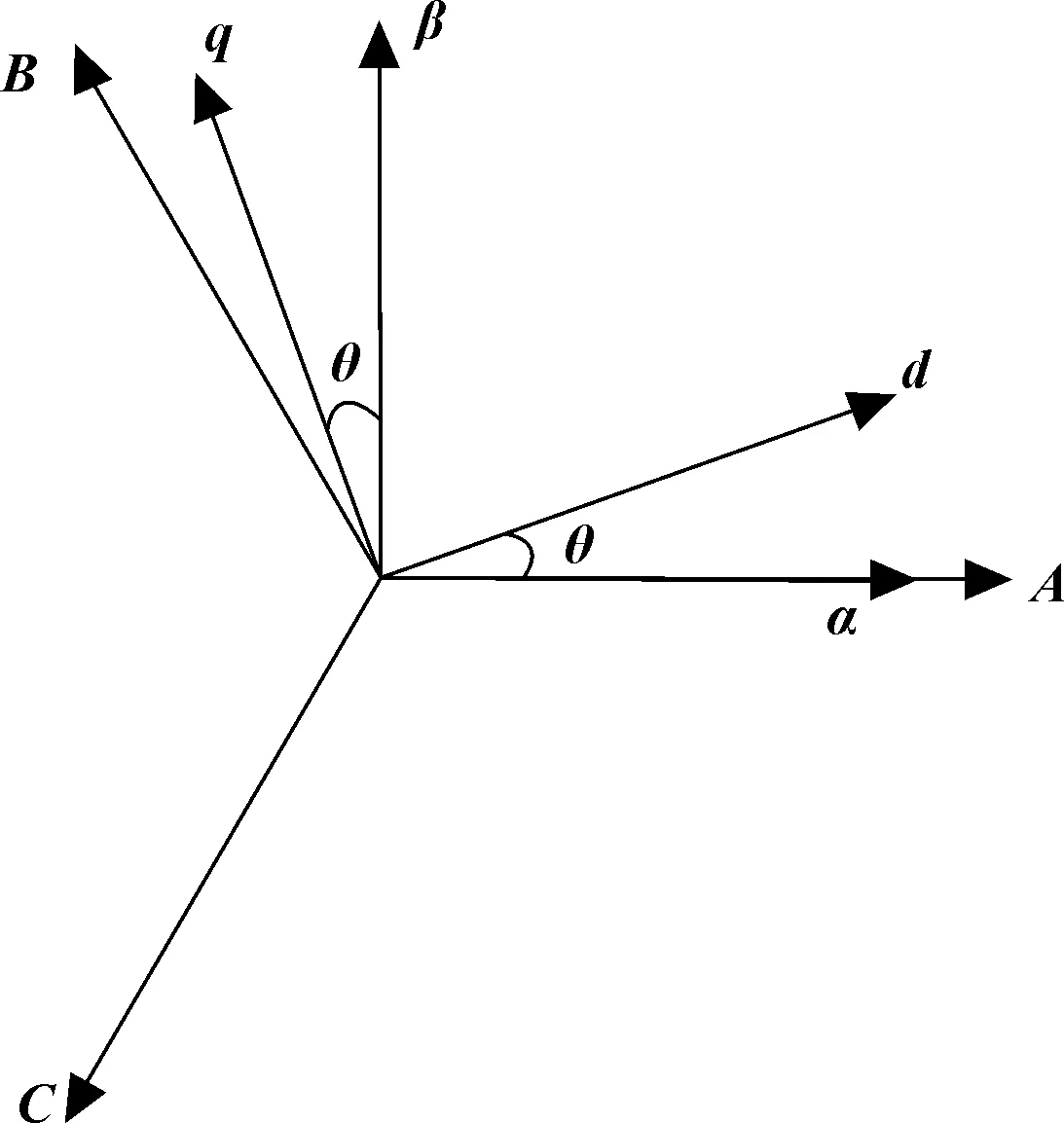
图1 三种坐标的关系
如上图所示,A-B-C为自然坐标系;α-β为经过Clark变换的静止坐标系;d-q为经过Park变换的同步旋转坐标系。
目前以微控制器为核心的数字化控制系统是电机驱动的一个趋势,因此在逆变器中选择使用更适用于数字化控制系统的SVPWM方法[7]。SVPWM具有优化谐波程度高、消除谐波效果较好、更容易实现的优点。而且SVPWM提高了电压源逆变器的直流电压利用率和电机的动态响应速度,同时减小了电机的转矩脉动。
相电压源逆变器电路如图2所示,输出电压取决于Q1-Q66个功率器件的开关状态。在任意时刻,同一桥臂只有一个功率器件导通,设上管导通,下管关断为1;上管关断,下管导通为0。Qa、Qb、Qc分别对应A相、B相、C相功率器件的开关状态,则三相开关状态组合Qabc一共有8种状态,对应8个电压空间矢量,在复平面表示为
(5)
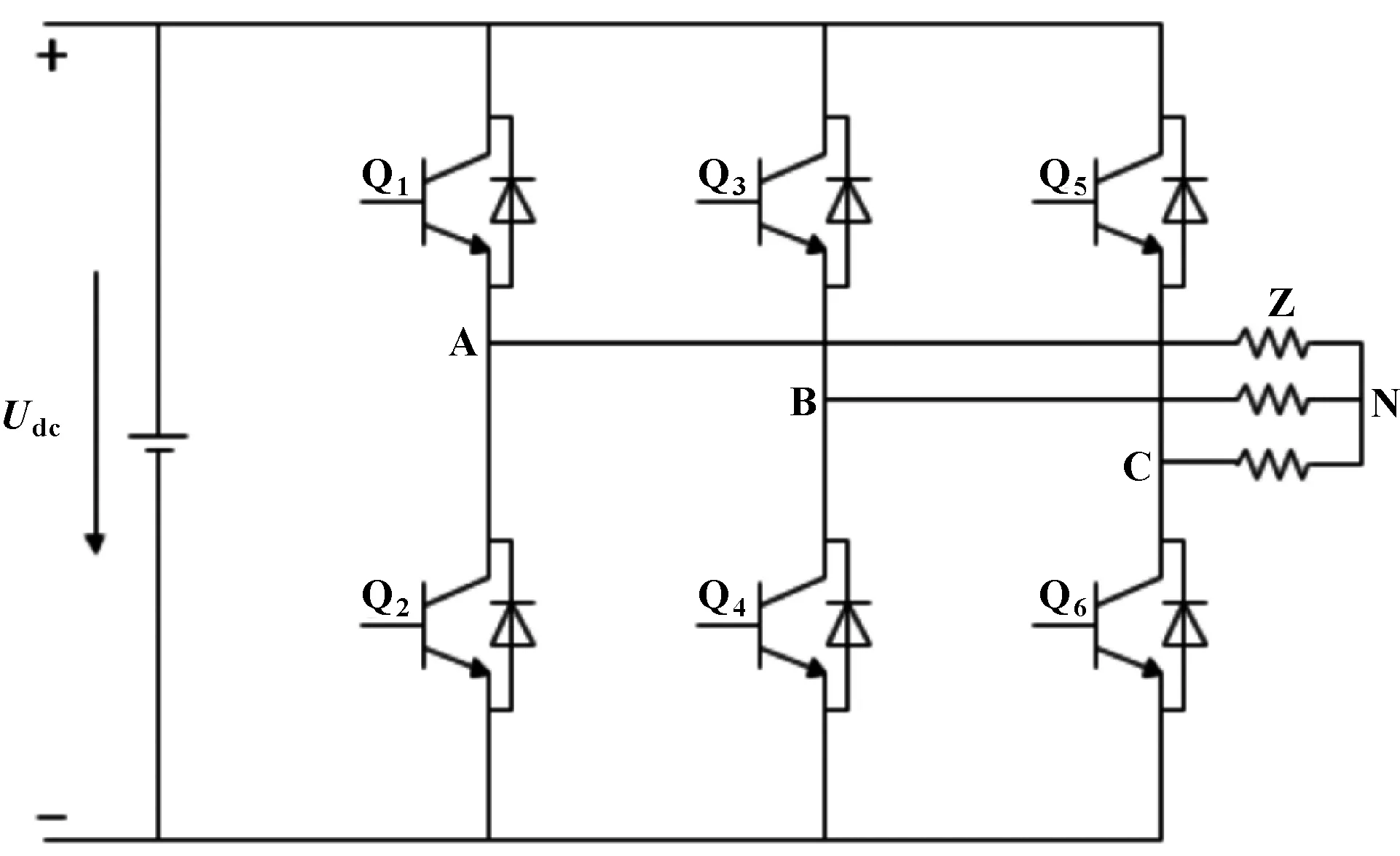
图2 相电压源逆变器电路
当3个开关状态同时为1或同时为0时,其模值为0,称为零矢量,因此8种状态中只有6种非零矢量,用Ui表示,将电压复平面空间分为6个扇区,如图3所示。
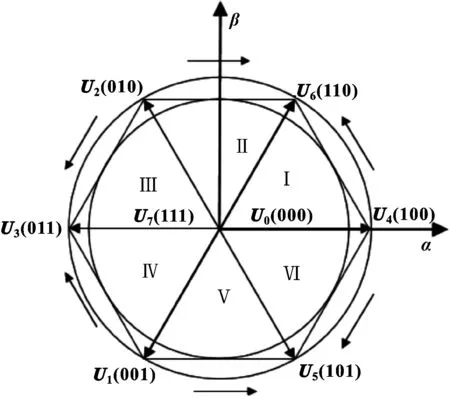
图3 电压空间矢量图
SVPWM是在矢量图的一个扇区内,通过控制该扇区的两个相邻基本矢量在一个采样周期的作用时间,形成等效合矢量,保持该等效合矢量的幅值不变,相位不断变化。当采样周期足够多,即当PWM频率越高,电压矢量的运行轨迹就越接近圆,电机运行越平稳。由矢量合成原理可知,位于复平面任意位置的电压矢量Uref都可由其所在扇区的相邻两个基本矢量合成,只要求出两个基本矢量的作用时间,即可求出相应的脉冲宽度,从而实现对整流器的控制。以扇区Ⅰ为例,电压空间矢量合成如图4所示。
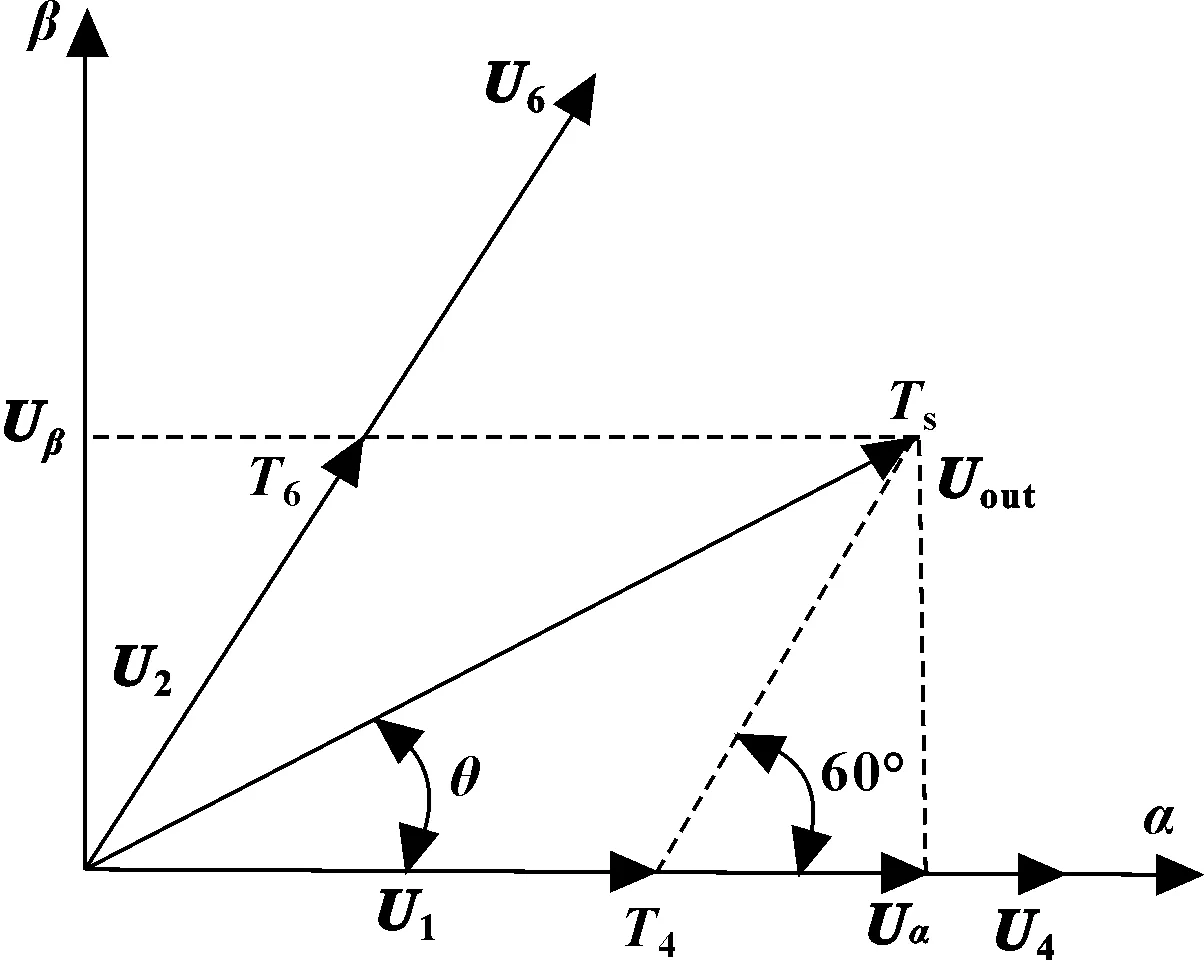
图4 电压空间矢量合成示意图
令T4、T6、T0分别表示U4、U6和零矢量U0的作用时间,则:
(6)
由图4可知:
(7)

(8)
判断电压空间矢量Uout所在的区间位置,然后利用所在扇区的相邻电压矢量和适当零矢量合成参考电压矢量,用Uα和Uβ分别表示参考电压在α、β轴上的分量,定义变量A、B、C。
(9)
若|Uref1|>0,则A=1,否则A=0;若|Uref2|>0,则B=1,否则B=0;若|Uref3|>0,则C=1,否则C=0。令N=4C+2B+A,得出N与扇区对应关系如表1所示。

表1 N与扇区对应关系
计算扇区的Simulink模型如图5所示。
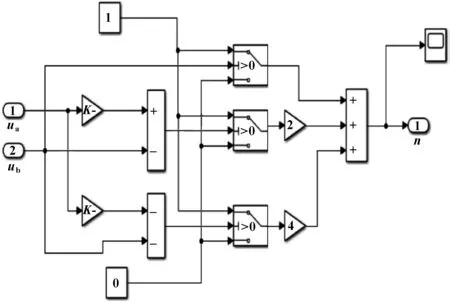
图5 扇区的Simulink模型
设3个变量分别为X、Y、Z,其计算方式如下式:
(10)
可得到各个扇区作用的时间,如表2所示。
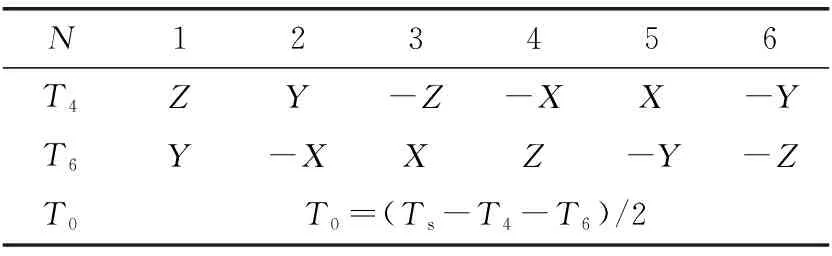
表2 各个扇区的作用时间
如果T4+T6>Ts,则需进行调制处理:
(11)
计算切换时间的Simulink模型如图6所示。
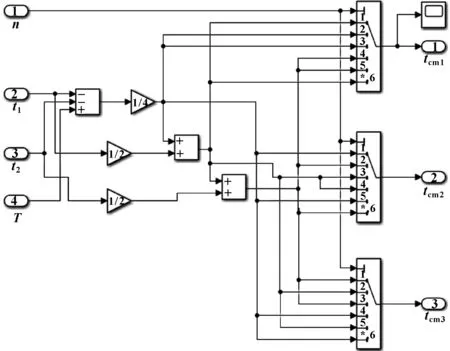
图6 切换时间点的Simulink模型
经过以上分析,整个SVPWM的仿真模型如图7所示。
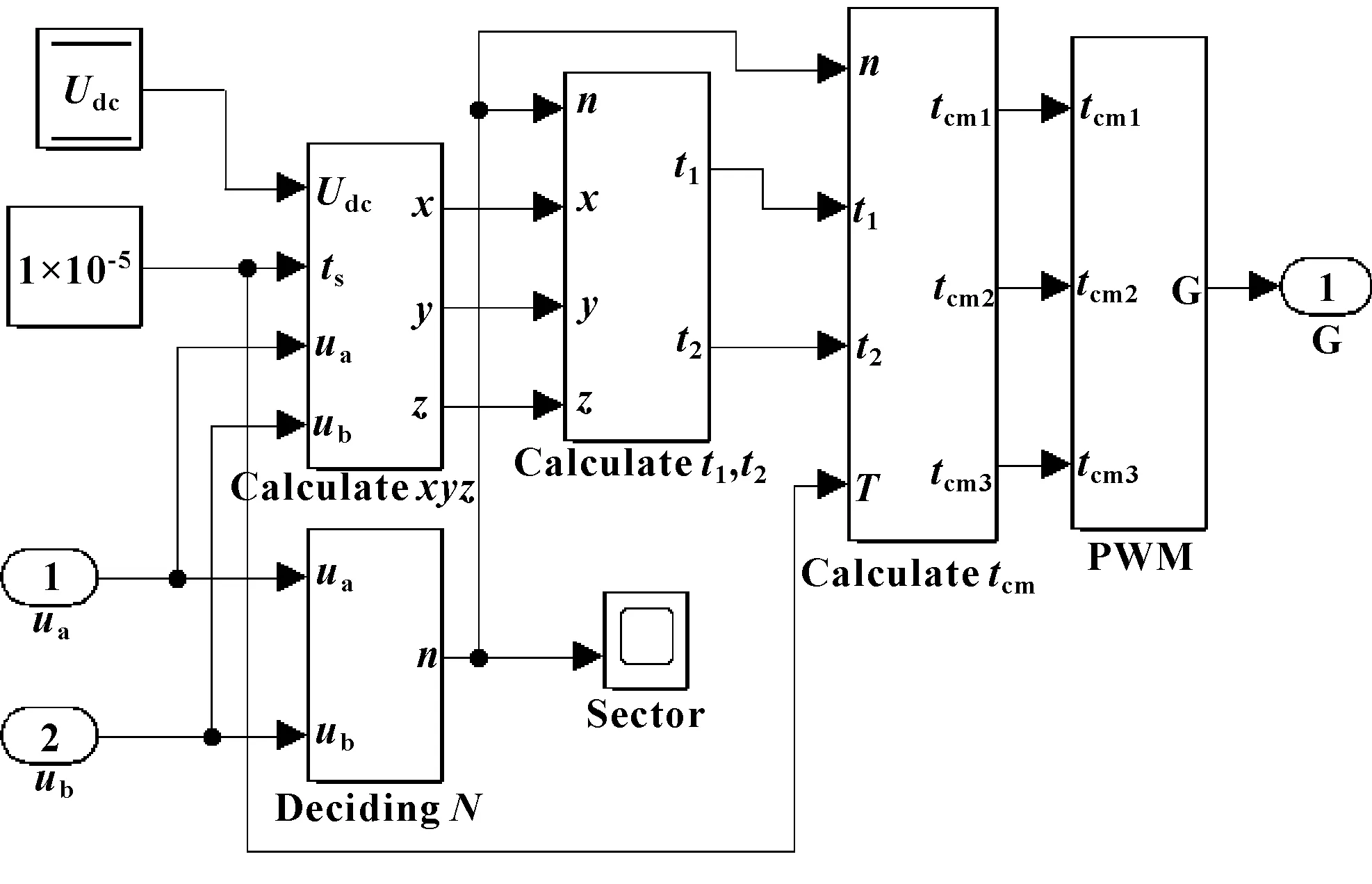
图7 SVPWM仿真模型
3 仿真结果
对于三相PMSM的矢量控制,没有异步电机的转差率问题,控制起来更方便,文中提出的简化控制系统,主要包括转速控制环、电压控制环和PWM控制算法3个主要部分。转速控制环的主要作用是控制电机转速,使其达到需求转速并稳定在需求转速,电压控制环的作用是加速系统调节的过程,使电机的定子电压更快速地接近需求电压矢量,加快系统的响应速度。与常见的电流控制环不同,该控制系统对直流母线电压采样,uq闭环直接对电机进行控制,节省了电流采样电路及电流重构算法,使控制系统更简洁,响应更快速。
该控制系统仿真模型如图8所示。

图8 PMSM控制系统模型
在0 s时启动电机,需求转速为900 r/min,电机初始负载为2 N·m,在0.4 s时突变为4 N·m,经过MATLAB/Simulink仿真计算,仿真时间为1 s,得到电机定子三相电流为正弦波,电流波形如图9所示,速度波形如图10所示。由仿真波形可知,在电机初始启动时,0.1 s左右开始稳定运行,当负载发生突变时,速度发生轻微的抖动但很快恢复了稳定值。由此可看出,该控制系统响应较快,发生干扰时也能快速恢复稳定状态,仿真的波形基本符合理论分析情况,验证了该控制系统的可行性。
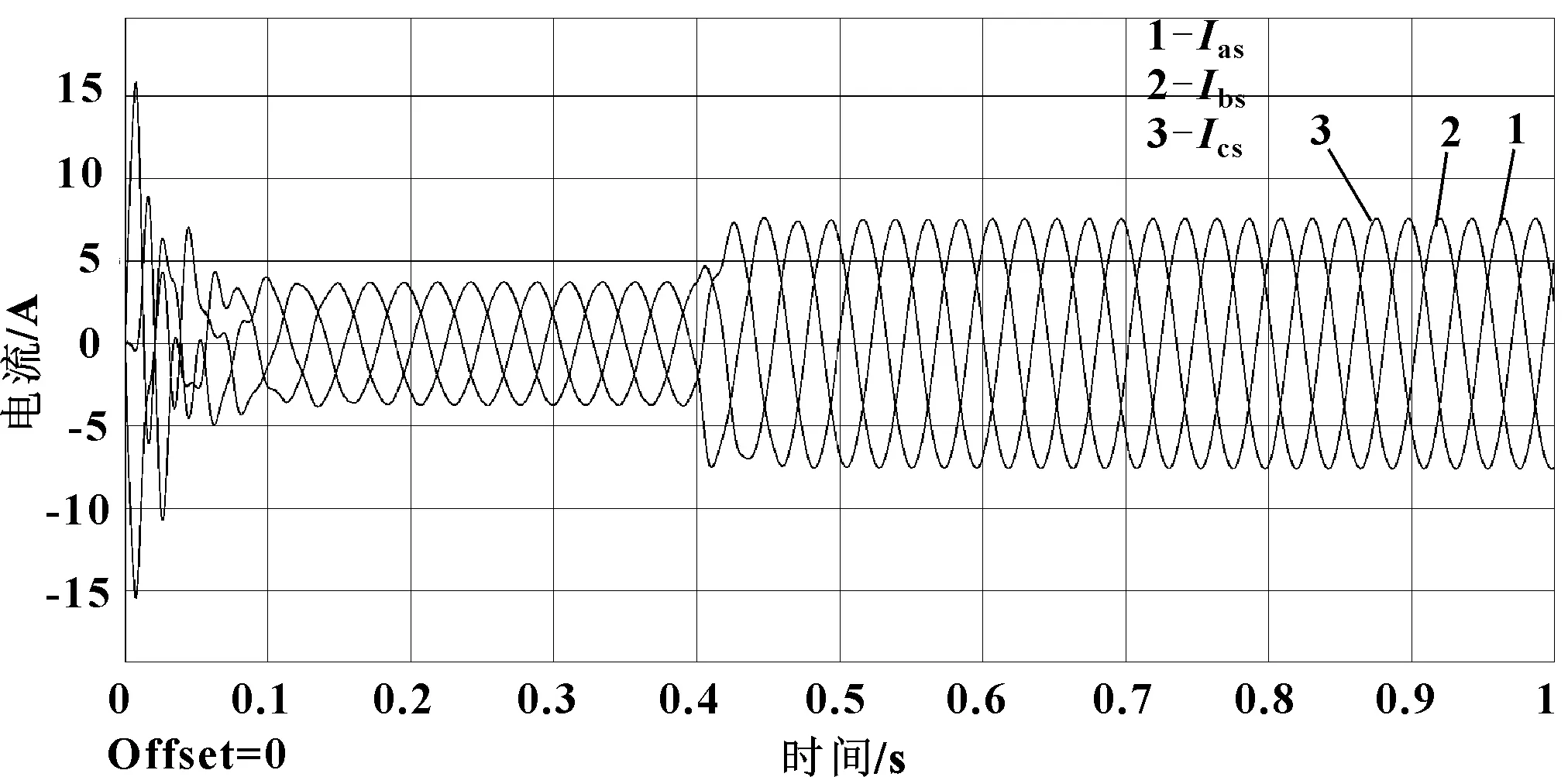
图9 定子三相电流波形图
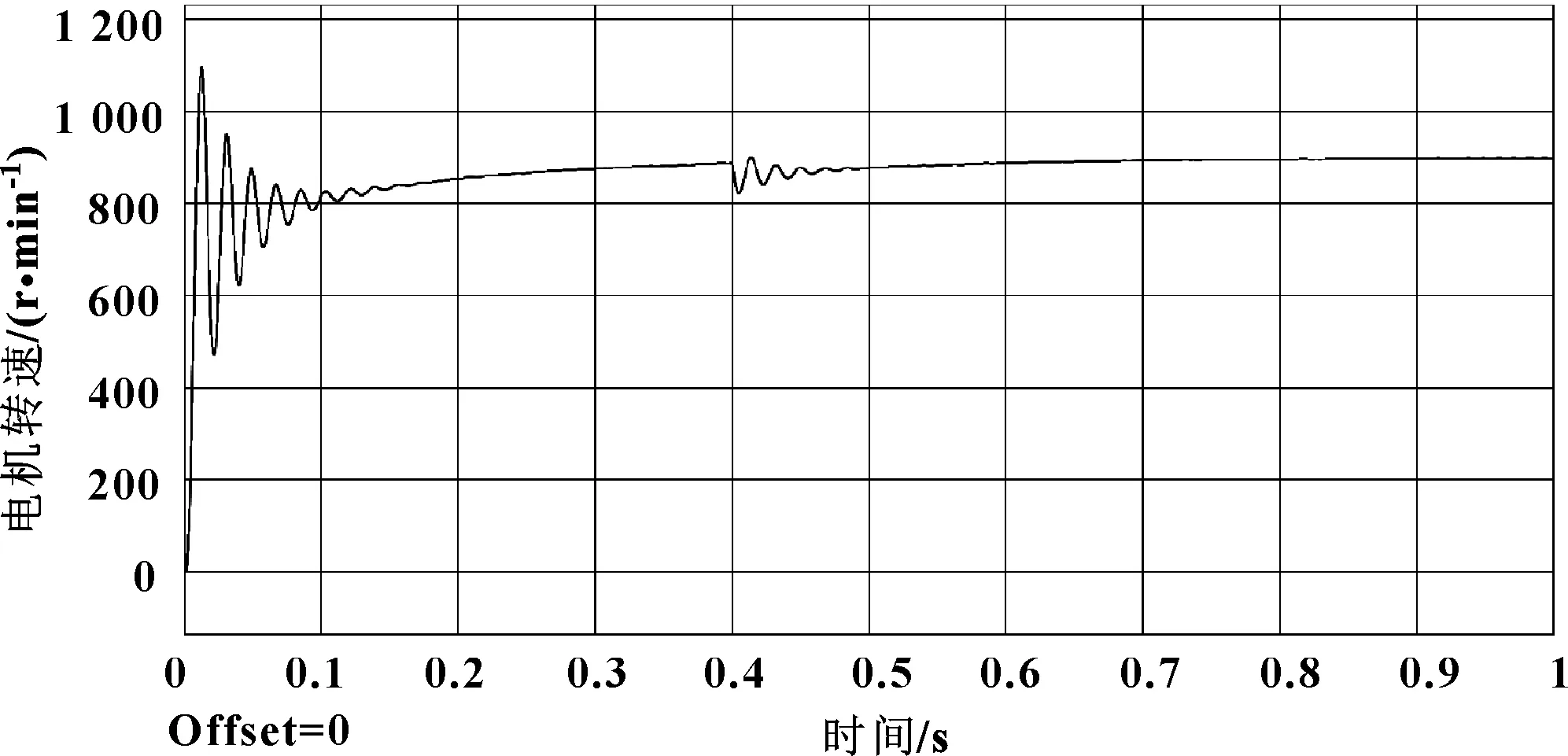
图10 仿真电机速度曲线
4 结论
通过对空间矢量脉宽调制原理的分析,结合PMSM的数学特性,利用MATLAB/Simulink软件,搭建一个使用SVPWM方法控制PMSM电机的简单的闭环控制系统模型,在仿真过程中,该系统运行稳定。通过仿真结果,可看出该控制方法响应较快,抗干扰能力强,且控制模型简单,效率高。符合永磁同步电机的运行特性,为PMSM的控制方法的研究奠定了一定基础。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
时代汽车(2022年19期)2022-10-18
计算机技术与发展(2022年7期)2022-08-02
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
南北桥(2022年2期)2022-05-31
科学家(2022年3期)2022-04-11
防爆电机(2022年1期)2022-02-16
电脑知识与技术(2018年12期)2018-07-12
电机与控制学报(2018年9期)2018-05-14