适用于主动拖线阵的高压采集远程传输设计与实现∗
2019-02-27 08:10朱代柱郭浩泉
舰船电子工程 2019年1期
廖 帆 朱代柱 郭浩泉
(上海船舶电子设备研究所 上海 201108)
1 引言
随着水声技术的不断发展,我国海洋科学研究和工程应用不断地向深海远海快速发展,主动拖线阵作为水下威胁目标的主要探测、定位设备之一,越来越受到关注[1]。主动拖线阵较传统拖线阵而言,增加了大功率电源、发射机等模块,工作环境复杂、恶劣,使用时通过近千米的电缆拖曳并供电,所有电子设备远离舰载平台。为了保证主动拖线阵工作时系统稳定可靠,需对其阵内电源、发射机等高压、大功率电子设备的工作状态进行实时监测与控制。此外,主动拖线阵电子模块均处在充满轻萘油的PU护套内且采取密封处理,工作状态不易知晓,检修不易。因此有必要增加自检与监测功能。该功能不仅有利于研发人员调试和维修,也有利于操作人员实时监测其工作状态。
本文针对项目实际需要,设计了一款适用于主动拖线阵的高压采集远程传输模块,该模块采用Atmel公司的集成芯片作为微处理器,外围电路包括供电电路、A/D采集调理电路、串口通信电路以及地址识别电路。
2 总体方案设计
主动拖线阵由于电子模块数量多,整体长度较长。工作时主动发射脉冲信号,功率大,电压电流均较高,造成拖缆及阵内电压压降较大,为监测主动拖线阵不同部位的工作电压,确保其稳定可靠工作,需在阵内不同部位设置多个高压采集远程传输模块。
高压采集远程传输模块的功能是实时采集监测主动拖线阵中高压电源的工作电压,并将采集的状态值通过通信控制机反馈至显控台,以供监控需要。
该模块采用Atmel公司的ATmega128A作为微处理器,待采电压值经信号调理电路以及线性光耦隔离后送至A/D采集通道,微处理器将采集的电压进行解码,通过地址识别电路区分主动拖线阵内不同部位的工作电压,最后将解码补偿后的电压值传输至显控台,供操作人员知晓。
高压采集远程传输模块组成框图如图1所示。

图1 高压采集远程传输模块组成框图
3 高压采集远程传输硬件设计
3.1 信号调理设计
主动拖线阵工作电压较高,电压范围300-420VDC,无法直接送至微处理A/D采集端口。信号调理电路的作用是将待采高压经过分压、运放电压跟随、光耦隔离后转换成A/D采集电压。采用运放电压跟随与光耦隔离是为了将待采集电压的“地”与微处理器的“地”有效隔离,防止在强电磁干扰环境下,干扰信号随着电路中的地线传输至微处理芯片中,影响微处理器对A/D采集和串口通信。
光耦隔离电路采用AVAGO公司的HCNR201的隔离器,其工作时通过运放N2A调节HCNR201光耦隔离器中LED的光强度与光电流IF,光耦内部输入侧与输出侧的光敏二极管接收的LED产生的光强,从而产生光电流I1与I2。其中输入侧的光敏二极管用以监测LED的光强,并使其保持稳定。其典型工作模式如图2所示。
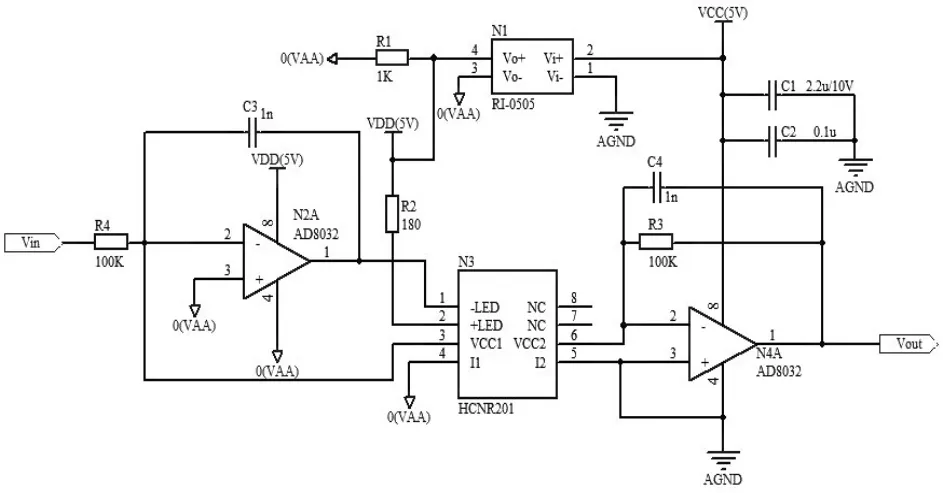
图2 线性光耦典型工作模式
图2 中线性光耦的工作原理为
根据运放“虚断”的和光耦的工作原理可知,流过光耦输入侧光敏二极管的电流为I1,其计算公式如式(1):

光耦内部输入侧与输出侧光敏二极管产生的光电流I1与I2的关系如式(2)所示:

其中,K为线性光耦的光耦增益,其值为1±5%。
运放N4A与R3形成跨阻放大器,将I2转换成输出电压VOUT,其关系如式(3)所示:

由上式(1)、(2)、(3)可得调理电路输入电压与输出电压的关系如式(4)所示:

可见,VOUT和VIN保持线性关系,并与LED的输出光强无关,与光耦隔离器自身的光耦增益有关。
3.2 串口通信与地址识别设计
串口通信采用RS485串行总线方式,通过平衡发送与差分接收的方式,具有抑制共模干扰的能力。ADM2582E为单电源隔离型485芯片,输出速率可达16Mbps,具备2500V隔离电压、全/半双工工作模式以及±15KV的ESD保护,串口总线最多可驱动256个从机。为了有效抑制主动拖线阵内强电磁干扰的影响,本文设计的串口通信电路采用ADI公司完全隔离型的ADM2582E芯片作为串口收发器。其串口通信收发电路如图3所示。
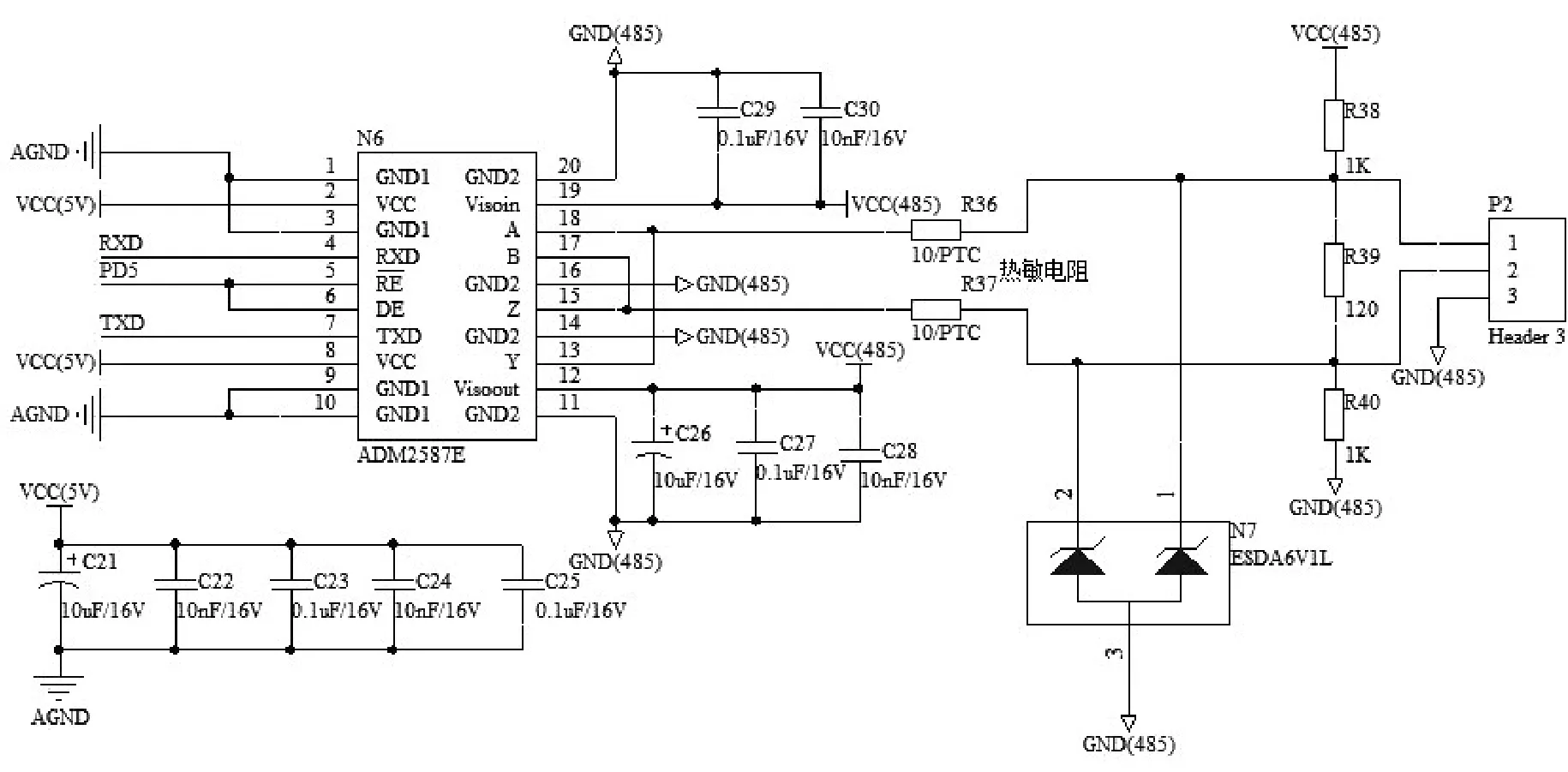
图3 串口通信收发电路
主动拖线阵长达数百米,因此RS485串口传输总线也达数百米,为增加传输系统稳定性,减小传输串扰的影响,在传输模块的串口输出端增加了R39(120Ω)终端匹配电阻。
隔离型ADM2582E芯片虽然能有效抑制高共模电压,但是在总线上仍会存在浪涌冲击、电源线与485总线短路、雷击等潜在危险。为避免上述潜在危险,在图3中的串口通信收发电路设计时,A、B输出线上增加了4Ω~10Ω的PTC电阻(R36、R37),防止冲击电流过大烧毁串口收发芯片,此外,在A、B输出线增加了TVS二极管(N7)进行防护。
地址识别硬件电路采用拨码开关将多个高压采集远程传输模块进行编码,软件上进行地址识别,从而达到监测主动拖线阵不同部位的工作电压。
3.3 供电设计
高压采集远程传输模块采用主动拖线阵内48V直流供电,模块内部采用RI公司的RI-4805隔离型电源芯片将外部48V直流转化成微处理器的供电电压(5V)与A/D采集参考电压(5V)。为降低外部干扰的影响,在信号调理电路中,通过RI-0505隔离型电源芯片(图2中的N1)将光耦隔离器两侧的运放的进行隔离供电,以达到待采电压与A/D采集电压的有效隔离。
4 高压采集远程传输软件设计
4.1 数据传输协议设计
在主动拖线阵内,各电子模块的数据传输采用的是主从式结构,即主机依次轮询各从机,然后根据需要发送各从机数据。其工作原理是通过通信控制机(主机)下发指令,高压采集远程传输模块(从机)接收指令后,根据地址匹配,依次上传监测信息。为了保证主机与从机之间数据有效地接收与发送,需要规定主机与从机之间的数据协议。表1、表2为高压采集远程传输模块接收和发送的数据协议。

表1 接收数据协议(B=Byte)

表2 发送数据协议(B=Byte)
校验算法采用循环冗余校验编码(Cycle Redundancy Check,CRC)。CRC校验采用多项式编码方式,发送方与接收方使用一个生成多项式k(x),且k(x)的首位和最后一位的系数必须为1。
CRC的处理方法是:发送方以k(x)去除t(x),得到余数作为CRC校验码。校验时,以计算的校正结果是否为0来判断数据帧是否出错。本文采用在数据的校验方法上采用CRC256校验,即将所有传送字符的ASCII码累加后除以255得到校验码。
4.2 软件处理流程设计
高压采集远程传输模块串口通讯波特率设置为19200,数据8位,停止位1位,无校验位。其软件处理流程主要包括:MCU状态初始化、A/D转换、接收地址匹配、串口通信和数据解码与补偿。其软件处理流程如图4所示。
在实际项目使用过程中,为了监测主动拖线阵工作时的工作电压,高压采集远程传输模块接收上位机发送的同步采集信号后,立马采集当前时刻的工作电压,并进行A/D转换,将转换后的值存储于A/D寄存器中,待上位机发送采集数据指令之后,采集传输模块通过地址匹配,将匹配吻合后的数据进行解码、补偿后依次上传至上位机。
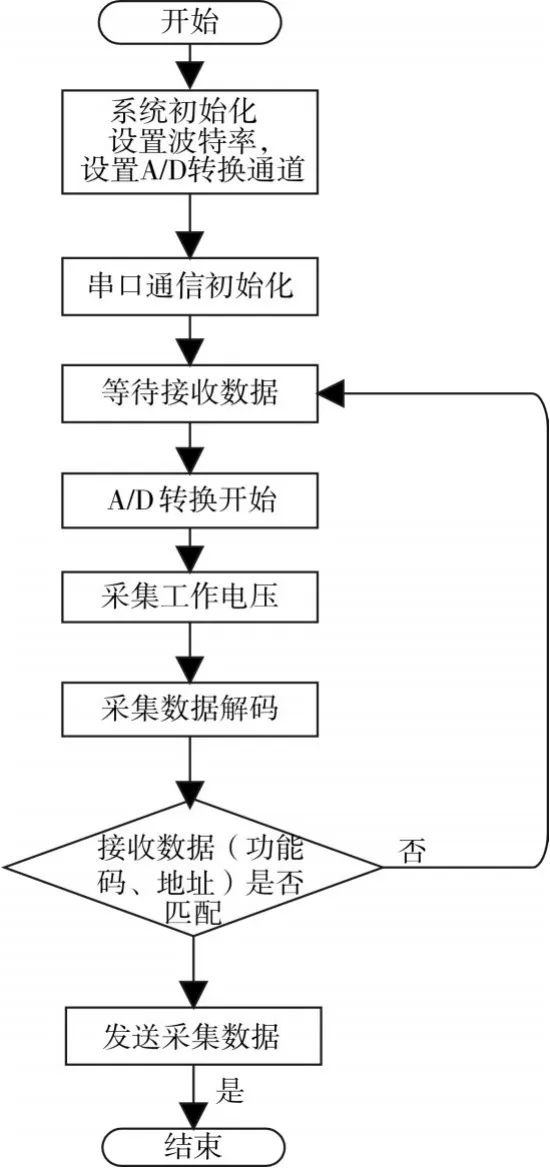
图4 软件处理流程框图
5 结语
高压采集远程传输模块采用Atmel公司的AT-mega128A微控制器作为主控芯片,完成A/D采集与RS-485远程传输通信,不仅简化了电路设计,而且提高了系统实时响应能力。
信号调理电路将待采高压经运放、光耦隔离转化成A/D采集输入电压,有效地隔离了高压串扰对主控电路的影响,提高了系统的稳定性与可靠性。
串口通信电路采用RS485串行总线工作模式,将多个高压采集远程传输模块作为从机,可实时知晓水下主动拖线阵中各部分高压状态。串口通信电路采用完全隔离型ADM2582E作为串口收发电路,可有效减小系统工作时的强电磁干扰,确保系统稳定可靠工作。
本文设计的适用于主动拖线阵的高压采集远程传输模块,经过系统联调、整机湖上性能测试以及海上验证试验,其基本性能得到有效验证,主要体现在以下两个方面:一是数据实时反馈准确,该模块通过软件处理,对A/D采集结果进行解码补偿,可实时反馈主动拖线阵的各段处工作电压,监测其工作状态;二是抗电磁干扰性好,该模块采取了有效地隔离与抗电磁干扰手段使其误码率低,工作状态稳定可靠。
猜你喜欢
军民两用技术与产品(2022年6期)2022-08-06
现代妇女(2022年5期)2022-05-25
英语文摘(2021年11期)2021-12-31
计算机技术与发展(2020年4期)2020-04-30
现代计算机(2020年3期)2020-03-05
廉政瞭望(2018年15期)2018-09-17
学生天地(2018年19期)2018-09-07
电子技术与软件工程(2017年5期)2017-04-23
民生周刊(2015年6期)2015-03-23
智能计算机与应用(2007年3期)2007-07-05