岛舰一体化协同防空动态决策模型及求解算法
2019-03-01 02:00刘文彪
指挥控制与仿真 2019年1期
刘 振,刘文彪
(海军航空大学岸防兵学院,山东 烟台 264001)
岛礁协同防空作战不同于一般地域的要地防空,舰艇平台可以支援岛礁要地防空,从而构成岛舰一体化的动态武器目标分配方案。岛舰一体化协同防空动态模型本质上属于多阶段多目标的动态武器目标分配(Dynamic Weapon-target Assignment, DWTA)问题,每一阶段分配的结果都要用于后续的分配。动态武器目标分配考虑了多个阶段武器和目标攻防对抗,并且还要考虑前一阶段作战效果对后一阶段的影响,因此比静态武器目标分配要复杂得多。当前比有一些学者已经对动态武器目标分配问题进行了广泛的研究。其中,文献[1]提出武器协同运用的DWTA模型,用于对抗多阶段多枚来袭的反舰导弹;文献[2]首先将利用分支定界获得的分配方案为训练样本,并构造模糊K近邻分类器获得目标分配结果,能够实现快速目标分配;文献[3]提出资源保护型的动态武器目标分配问题,给出虚拟排列方式便于产生下一时刻的分配结果;文献[4]提出基于贪婪局部搜索的基于纳什均衡概念,建立空战动态目标分配模型,并Memetic算法来解决具有约束的DWTA问题;文献[5]利用一种改进的粒子群算法进行求解。
在未来海上作战过程中,武器平台和制导平台并不一定存在固定的隶属关系,也不一定局限在同一个地理位置范围内。为了提高整体的作战效能,位于不同位置的多个武器平台和制导平台可以形成拦截联盟,对来袭目标进行有效地拦截,突破了地理位置的局限性,打破了武器平台和制导平台固定的配属关系,形成了一体化的作战分配方案,本文在这个方面进行了一些探索,将舰艇平台中的火力通道和制导通道与岛礁平台协同进行防空。
对于动态的武器、目标和传感器分配方法,国内外已经有了一定的研究[6-7],但较多的注重于协同制导律的设计方法,考虑编队协同到达时间、影响角等因素限制下,给出制导律设计,保证齐射攻击能够取得最大的效果[8-9]。文献[10]研究了多平台协同制导下的空空导弹制导交接问题,给出了候选协同制导平台的选择决策方法;文献[11]提出利用粒子群优化方法解决集中式条件下的武器平台、目标和制导平台的分配,是一种静态条件下的集中式分配。对于动态的武器平台、目标及制导平台分配问题,在公开发表的文献中还较少。因此本文对这一方面进行了深入研究,在考虑岛舰协同防空作战前提下,给出了一体化动态武器目标分配模型,考虑到紧致遗传算法(compact genetic algorithm, CGA)在收敛速度上的优势,采用该算法求解岛礁协同防空动态武器运用模型。为提高求解该模型的速度和精度,对基本的紧致遗传算法进行了分析和改进,提出一种混合紧致遗传算法(hybrid compact genetic algorithm, HCGA)求解岛礁协同防空动态武器运用问题,经仿真分析,充分证明了模型和算法的有效性。
1 岛礁协同防空动态武器运用模型
1.1 协同防空一体化动态模型
整个岛舰协同防空作战可以划分为T个阶段,每个阶段以目标被击毁或者敌方投入新的作战兵力而进行动态更新,因而目标数目在每个阶段往往会发生变化。在岛舰协同防空作战过程中,舰艇平台能有效地支援岛礁防空,通常情况下岛礁所配属的火力单元和制导平台只保卫岛礁所属要地,并不对舰艇平台进行火力支援,因此在第t个作战阶段的目标设定为N(t),t=1,2,…,T,T为总的攻防对抗阶段,岛舰平台中所有火力单元的火力通道表示为M,其中M={M1,M2},即岛礁所配属的火力单元和舰艇平台支援火力单元分别表示为M1和M2,制导平台中当前阶段的可用制导通道设定为R,其中R={R1,R2},岛礁所配属的制导通道和舰艇平台制导通道分别表示为R1和R2。在舰艇平台火力支援下,当前可考虑的一体化作战单元配置关系主要有以下几种。
1)当岛礁所属火力通道和制导通道可以完全满足协同防空的前提下,此时舰艇平台可以不参加支援作战,仅依靠岛礁各作战平台武器协同运用即可完成防空任务,此时的岛舰协同防空退化为要地一体化协同问题,一体化作战单元组合为(M1,R1,N(t)),表示利用岛礁武器平台M1,在制导平台R1配合下,用于打击目标N(t)。
2)舰艇平台支援岛礁平台协同作战的情况下,构成岛舰一体化协同防空模型,不过此时岛礁作战平台内部的火力通道和制导通道,以及舰艇平台的火力通道和制导通道,只对同属性平台的武器实现协同制导和支援保障,舰艇平台只是介入了协同防空,但并不与岛礁平台构成网络化的协同作战,此时一体化作战单元组合为(M1,R1,N(t))和(M2,R2,N(t)),故此时各平台之间不存在交互使用关系,其平台协同防空的配属关系可以表示为如图1所示。
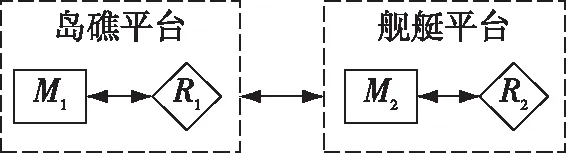
图1 同类型平台自组织协同防空
3)岛礁作战平台依靠岛礁平台提供的制导通道和舰艇平台提供的制导通道构成一体化的作战单元,可以表示为(M1,R1,R2,N(t)),舰艇平台的制导通道可以提供给岛礁和舰艇平台,并构成一体化火力作战单元,其组合形式为(M1,M2,R2,N(t)),平台作战单元组合配属关系可以表示为如图2所示。
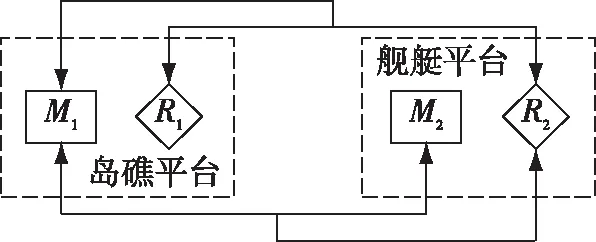
图2 协同防空一体化作战单元构成
在第t个阶段,武器通道h和制导通道l如果完成了一次攻击过程,武器通道和制导通道在t+1阶段的更新过程可以表示为

(1)
则武器通道的决策变量更新方式为
(2)
定义目标i的突防系数为Ci(t),当Ci(t)=1时,则表示目标i在第t个阶段成功突防,Ci(t)=0则表示已经被击毁。
岛舰协同防空的目的就是使突防目标的威胁降到最小,则最终在第T个阶段突防目标的威胁度F可以表示为

(3)
满足以下约束条件:
1)x(t)ijk≤Lijk(t) ∀t=1,2,…,T
∀j=1,2,…,m
∀k=1,2,…,r
其中,在第一个约束条件中,当Lijk(t)=1时,则表示第j个火力通道可以利用第k个制导通道用于攻击目标i,并且满足当j∈{M1}时,k∈{R1,R2},当j∈{M2},k∈{R2}。第二个条件表示同一个目标最多被不超过a个武器通道攻击。第三个约束条件表示同一武器通道最多被使用不超过b次。
1.2 拦截适应性判断
在协同防空动态武器目标分配问题中,需要对拦截适应性进行判断。目标必须在武器的作用距离内,目标速度满足武器的运用条件,目标方位角和高度满足武器发射条件,同时制导通道必须能够对该武器通道进行制导,并且有空闲的制导通道等诸多约束下,才构成武器通道j攻击目标i的条件。此外目标与火力作战单元的距离和目标位置关系将是影响一体化协同防空目标分配的重要影响因素,因此影响岛舰协同防空的主要因素可以概括为:
1)判断当前目标的速度和高度能否满足武器平台的作战要求,由于武器平台的性能指标在设计定型时已固化,如果当前目标速度、高度等参数已经超过了武器平台的作战使命任务,则无法拦截;
2)舰艇平台的制导通道可以有效为岛礁平台提供中继制导,两者可实现制导交接,而岛礁平台并不考虑给舰艇平台提供中继协同制导功能;
3)岛礁上的多个武器与制导通道可以构成一体化作战单元,同时舰艇之间的多个武器与制导平台也可以构成一体化协同防空作战单元,舰艇平台武器通道可以有效对岛礁进行作战支援;
4)目标当前的位置和距离,特别是航路捷径需要满足拦截要求,依据层次化协同防空的要求,对目标的拦截要在杀伤区范围内。

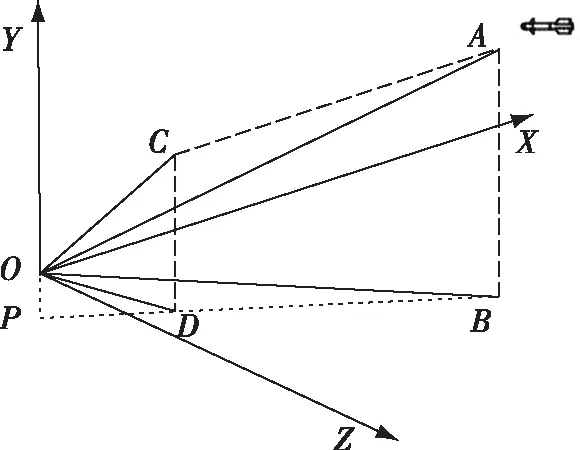
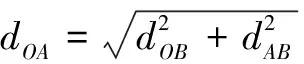
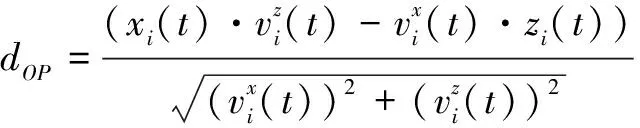
图3 求解目标杀伤区近界示意图

(4)
则可得分配区域近界为
(5)

(6)
可以依据同样的思路得到分配区的远界。目标所处的位置必须满足杀伤区近界dmin和远界dmax要求,即
dmin≤d≤dmax
(7)

2 问题求解方法
2.1 基本紧致遗传算法及其存在的问题
当前进化算法大量涌现,并被广泛地用于求解复杂NP难优化问题,传统进化算法在求解大规模多阶段DWTA问题,往往不能兼顾收敛精度和求解速度,无法有效满足实时性要求。紧致遗传算法(CGA)[13]利用概率模型有效地减少了系统内存的开销,在收敛速度上存在巨大优势,在国内外已经进行了大量的研究[14-15],并引起了一定的关注,但其作为一种低阶概率模型进化算法,由于不考虑基因之间的连接关系,存在收敛效果较差,容易陷入局部极值等问题。本文在广泛研究国内外相关文献的基础上,提出一种新型混合紧致遗传算法(HCGA),并将其用于求解岛礁协同防空动态武器目标分配问题。
2.2 求解岛舰协同防空的混合紧致遗传算法
步骤1初始化概率向量p1和p2,其中p1和p2分别为种群pop1和种群pop2的概率向量,依据概率向量产生初始种群;



(8)
其中Kmax表示最大迭代次数。
步骤5在种群pop1和pop2中选择适应度最优的个体lv,将其作为疫苗,以免疫概率pv对pop1中个体进行免疫接种;
步骤6判断是否满足收敛条件,满足则算法结束,输出结果,否则转步骤2。
2.3 求解步骤
设定编码长度为L=m·n·r,其中m、n、r分别表示火力通道、目标、制导通道数目[16]。动态武器目标分配问题的关键就是确定在每个阶段火力通道、制导通道和目标的组合,故其编码如图4所示。

图4 染色体编码示意图
图4为第一阶段的染色体编码方法,该阶段的染色体长度为m·r·n,其他阶段的编码方法与该阶段相同。第一阶段染色体由m部分构成,分别为L1,L2,…,Lm,每一部分都相等,长度均为r·n,其中每一部分又由r个子部分组成,每一子部分的长度为n。在求解过程中,为有效处理约束条件,可以进行如下设置:
1)在L1,L2,…,Lm中,每一部分的第i位之和不大于a,即L1(i)+L2(i)+…+Lm(i)≤a,从而保证一个目标不至于被超过a个武器通道射击;
HCGA求解岛舰协同防空动态武器运用问题的流程为
步骤1:初始化算法和问题信息,设置火力通道m、目标n、制导通道r数目,并确定算法的种群规模Npop、染色体长度及更新率等算法的基本参数信息;
步骤2:初始化概率向量p1和p2,并产生初始种群;
步骤3:以式(3)为优化目标函数,按照2.2节的进化机制,进行种群个体竞争;
步骤4:在种群之间的个体交流,交流比例设置按照式(8)进行;
步骤5:从种群中选取出适应度最大的个体修改第一个种群中的个体;
步骤6:依据式(6)和式(7)判断是否满足拦截条件,并对解个体进行修复,确保武器通道和目标攻击次数要求;
步骤7:判断概率向量是否满足收敛条件,满足收敛条件则输出分配结果,否则转步骤3。
3 仿真分析
假定在某一岛礁上为保护三个重要目标,配备有两个要地防空火力单元K1和K2,并配有一个指挥中心K3,以K3为坐标中心,其作战示意图可以表示为如图5所示。K1和K2防空火力单元分别配备了远程防空武器系统,K1的火力通道分别表示为k11和k12,制导通道表示为RK1,K2的火力通道表示为k21和k22,制导通道表示为RK2,为支援保护岛礁重要军事目标,现有两艘舰艇平台A1和A2,配备远程防空导弹进行支援保护,A1的火力通道为a11、a12和a13,制导通道表示为RA1,A2的火力通道为a21、a22和和a23,制导通道为RA2,远程平台的射程为10~150 km,速度为1000 m/s。假定在作战初期各平台的弹药量都充足,即现有弹药数量能够满足拦截要求,所有通道都处于空闲状态,并且初始作战时刻制导通道的数量与火力通道数目相同。
图5 岛舰协同防空作战示意图
假定敌方有三艘舰艇Bi(i=1, 2, 3),并且配备有同一种类型的远程巡航导弹,速度为300 m/s,则此时各个平台的位置以与坐标原点的距离和与x轴的夹角表示,即K1(2 km,15°)、K2(2 km,80°)、A1(5 km,90°)、A2(5 km,90°)、B1(80 km,30°)、B2(80 km,45°)、B3(80 km,70°)。目标分三个波次进行攻击,第一波次齐射三枚巡航导弹,编号分别为s1、s2和s3;在间隔50 s后,敌方进行第二波次攻击,又再次齐射三枚导弹s4、s5和s6;再次间隔50 s后,B3发射两枚导弹s7和s8,其中tsum设置为10s,目标其他参数信息可以参考文献[1]、[13]和[14]设置。约束条件可以表示为:1)岛礁平台发射的防空导弹可以利用岛礁或者舰艇平台制导;2)同一个目标被最多不超过2个武器通道攻击;3)火力通道最多被运用不超过2次。
仿真分析主要分为两部分,首先将本文提出的一体化动态武器目标分配协同防空模型,与静态武器目标分配模型进行对比分析,其次对本文提出的混合紧致遗传算法(HCGA)的性能进行对比分析。
3.1 一体化动态协同防空模型与静态武器目标分配对比分析
利用上文建立的一体化岛舰协同防空模型,并考虑拦截适应性和相关约束条件,利用混合紧致遗传算法,求解获得武器目标分配结果如表1所示。
表1 一体化动态武器目标分配结果
当t=1时刻,初始分配方案为(k11,RK1,s1)、(a11,RA1,s2)和(a21,RA2,s3),在当t=2时刻,由于有新的目标到来,此时利用剩余的岛礁防空单元K1的火力通道k12和舰艇平台火力通道a12和a21迎击,在下一时刻t=3,又出现了新目标s7和s8,此时的迎击方案为(a13,RA1,s7)、(a23,RA2,s8),t=4时刻,s2和s3若成功被拦截,s1成功突防,并摧毁火力单元K1,此时已经进入了近程火力单元K2的射程,则此时s4的攻击分配方案为(k21,RK2,s4),在t=5时刻,s4、s5和s6已经被击毁,在t=6时刻,s7和s8进入K2火力单元的射程,K2火力单元配合拦截s8,目标预计突防威胁值F最终为:11.45。
为了进行对比分析,将防空武器协同运用视作为静态武器目标分配问题求解,利用HCGA求解后的分配结果如表2所示,此时所得到的目标预计突防威胁值F为17.32。
表2 静态武器目标分配结果
从最终的仿真对比结果可以看出,利用本文提出的协同防空模型,有效地解决了多阶段岛舰协同动态武器目标分配问题,该模型可以有效地根据当前战场的实际情况,动态切换进入下一时刻,从而能够获得更满足战场实际的分配结果,仿真结果也更符合战场实际推理结果,因而能有效地提高岛舰协同防空效能,从仿真结果也能看到,目标的预计突防威胁值也明显降低。静态武器目标分配只是单纯根据战场静态事件触发而进行推理,求解效果往往不考虑前一时刻的对抗效果,因此并不符合实际战场的态势情况,所得结果并不一定能客观反映当前实际分配结果。
3.2 混合紧致遗传算法求解性能分析
对本文提出的混合紧致遗传算法(HCGA),求解一体化动态协同防空模型的性能进行分析,将其与基本遗传算法(GA)、紧致遗传算法(CGA)、蚁群算法(ACO)和粒子群算法(PSO)进行对比分析,以阐述本文选用该算法的原因和所提出的算法的优势。仿真想定不变,对目标的性能进行适应性改变,包括威胁度、速度、高度、航路捷径等,每种算法独立运行五次,统计获得的目标突防威胁值和求解时间,如表3所示。
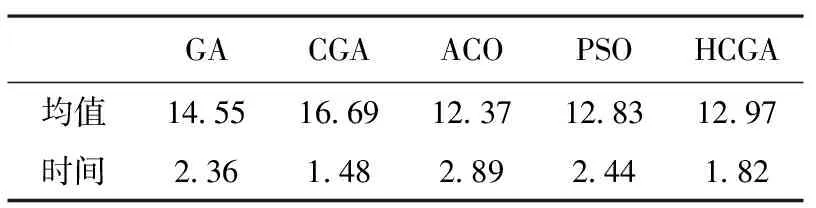
表3 静态武器目标分配结果
从表3的统计结果能够看出,高阶的进化算法,如ACO和PSO,能获得较好的求解效果,即获得较小的目标突防威胁值,但运行的时间也是最长的。基本的CGA,求解的效果最差,但由于进化算法的特性,其所占用的系统开销最小,本文所提出的HCGA,在保留了CGA基本特性基础上,即所用时间较短,同时提高了算法的寻优效果,由于在多阶段的协同防空动态武器目标分配问题中,对时间性能要求较高,因此在保证一定的分配效果的基础上,要尽量降低求解问题的时间,故这也是本文选择运用该种进化算法的初衷。
4 结束语
本文以突防目标威胁最小,建立了岛舰一体化动态防空武器目标分配模型,提出利用混合紧致遗传算法求解该问题。对于岛舰协同防空来说,所考虑的因素较多,特别是在多阶段动态攻防对抗过程中,模型较为复杂,求解也比较困难,本文对这个方面进行了初步的探讨,在后续的工作中,不断优化模型并使得模型能够更加贴近战场实际是需要重点解决的问题,同时也积极寻找更为有效的高阶智能进化算法,提高求解问题的效率。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
政工学刊(2021年8期)2021-07-31
北京航空航天大学学报(2021年6期)2021-07-20
政工学刊(2021年4期)2021-04-13
中国新技术新产品(2020年19期)2020-12-25
东坡赤壁诗词(2020年4期)2020-09-02
房地产导刊(2020年7期)2020-08-24
军事运筹与系统工程(2019年4期)2019-09-11
航天电子对抗(2019年4期)2019-06-02