
考虑噪声抑制的风力机模拟器的设计与实现
2019-03-06 09:22徐洋超刘尚孟陈骏杰俞小虎詹加华
浙江电力 2019年2期
徐洋超,刘尚孟,陈骏杰,俞小虎,詹加华
(1.国网浙江省电力有限公司绍兴供电公司,浙江 绍兴 312000;2.国网浙江省电力有限公司温州供电公司,浙江 温州 325000)
0 引言
WTS(风力机模拟器)作为实际风力机的实验替代设备,能在实验室环境下构建并进行风力机特性的模拟,简化风力机功率控制策略、并网控制策略、机械设备的故障分析以及风电系统及部件的开发测试等内容的研究。
目前,WTS根据本身的模型设计和风电系统中的研究对象大致分为3种:第1种WTS主要研究风电系统的并网变流和风力机的电磁部分,着重关注并网接入问题和风力机的电磁动态[1]。第2种WTS关注的重点在于故障模拟和状态监测[2-3]。第3种WTS主要服务于风力机伺服控制实验,验证不同湍流风速下设计的控制算法的有效性。本文研究的是第3种WTS[4-11]。
由于实验室环境下WTS的转动惯量较小,导致模拟结果同实际风力机的机械动态相差甚远,因此需通过缩放比例方式和惯量补偿策略使WTS达到实际风力机转动惯量的数量级,完成以小转动惯量模拟大型风电机组的风机机械动态[4]。
通过PWM(脉宽调制)技术对电机进行调速控制在实际工业现场中需要旋转编码器的配合,而旋转编码器一般利用光电转换将轴系的角位移等机械量转换成数字量(电脉冲)完成测速[12-13],而使用编码器测速不可避免地会产生噪声。
本文通过实验分析,发现传动链转速经微分运算后会放大噪声,进而影响WTS机械动态模拟的准确性。在此基础上,本文设计了考虑噪声抑制的改进策略,运用加速度观测器的方式获取传动链转速的加速度,最后经实验验证了改进后的WTS对转速具有良好的噪声抑制作用。
1 风力机模拟器的数学模型
1.1 风力机模拟器结构
如图1所示,WTS主要分为3个部分:
(1)发电并网系统。其主要设备包括发电机和变流器。该部分的电气结构与实际系统完全相同,可以真实反应风电并网的过程。
(2)实时数字模拟系统。其主要设备为PLC(可编程逻辑控制器),具有提供风速数值、计算风轮气动转矩与发电机电磁转矩等功能。该系统可实现风力机气动特性模拟、机械动态模拟和主控策略模拟和验证等[14]。
(3)风轮模拟系统。其主要设备包括变流器、电动机和机械飞轮。变流器在接收实时数字模拟系统输出的转矩指令后,模拟风力机的气动特性,对电动机进行转矩控制[15]。机械飞轮则补偿一部分转动惯量。
风轮气动转矩Ta的计算公式如下:

式中:ρ为空气密度;R为风轮半径;v为风速;ωt为风轮角速度;Cp为风能利用系数,是与叶尖速比λ有关的函数。
1.2 风力机模拟器转动惯量补偿策略
实际的风力机传动链模型如图2所示,在忽略摩擦阻尼的情况下,传动链的机械动态过程可表示为:

图1 风电系统与风力机模拟器的比较

图2 风力机的传动链模型

式中:Jt为整个传动链(折算至高速侧)的转动惯量;ng为齿轮箱变比;ωg为发电机的转速;Tg为电磁转矩。
WTS的传动链机械动态在忽略阻尼的情况下可表示如下:

式中:Ts为WTS电动机提供的转矩(即模拟实际的风轮气动转矩);Js为WTS整个传动链的转动惯量;ωs为WTS传动链转速;Tgs为WTS发电机的电磁转矩。
考虑到实际风机容量大于WTS,可先将实际风机按一定比例系数缩小至与WTS相同容量,即式(3)等号两边同时缩小ns倍,得到:

缩小后仍应与WTS有一致的机械动态,即ωs=ωg。同时两者的发电机电磁转矩也应相同,即Tg/ns=Tgs。 由式(4)和式(5)可得:
式(6)即为WTS模拟机械动态时所需的电动机转矩。等式右侧第一部分为实际风力机按比例缩小的气动转矩,第二部分为转矩的动态补偿量。
WTS的原理结构如图3所示,若Ts按式(6)进行气动转矩输出,则WTS传动轴转速与实际转速相同,即实现了机械动态模拟[15]。
2 转速噪声对传动链模拟的影响
由于WTS系统利用旋转编码器实现测速,故传动链的转速信号中便存在噪声。同时,WTS的控制系统以PLC为基础,表明WTS的控制系统本质上是一个离散系统(数字系统),因此需要将WTS的传动链数学模型进行离散化处理。
将式(6)两边乘以ns,还原传动链补偿模型后为[15]:

传动链离散模型如图4所示。
根据WTS传动链的离散模型,理想情况下,补偿转矩Tcomp可表示为:

图4 WTS传动链离散数学模型

式中,T为采样周期。
由于实际系统中测量转速噪声的影响,再加上脉动转矩导致的转速波动都会对Tcomp产生干扰项ξ,此时补偿转矩Tcomp则表示为:

将式(8)和式(9)相减可得:

根据式(10)可知,实际测量中的转速偏差会导致补偿转矩的偏差ΔTcomp,ΔTcomp作用于传动链中会改变模拟风轮时的气动转矩,最终影响WTS模拟风机时的机械特性。
补偿转矩偏差ΔTcomp的存在将造成以下影响:
(1)如图5所示,WTS模拟的转动惯量Jt要适中,一旦模拟的转动惯量过大,干扰项将被放大并淹没补偿转矩Tcomp,最终影响WTS机械动态的模拟[15]。
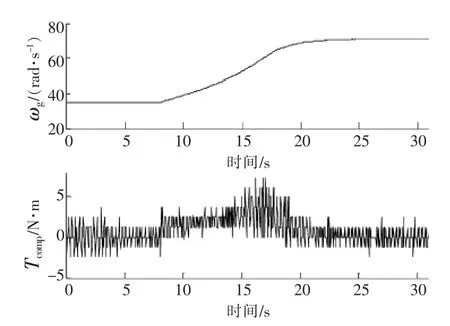
图5 转动惯量Jt过大时补偿转矩Tcomp效果
(2)如图6所示,系统的采样周期T要适中,采样周期T过小会将补偿转矩Tcomp淹没在被放大的干扰项ξ中;同时过大的采样周期则会影响控制系统的带宽,进而影响WTS机械动态模拟的准确性[16-17]。
(3)WTS在实际应用过程中,传动链中的干扰不容忽视,提高WTS模拟的准确性需要对噪声干扰进行必要的处理。
3 基于噪声抑制的改进策略设计
本文研究分析WTS系统中编码器采集的转速信号以及噪声的影响机理,针对噪声的特点选择状态观测器进行传动链的噪声处理。

图6 采样周期T过小时补偿转矩Tcomp效果
3.1 传动链转速噪声的分析
图7所示为WTS系统通过编码器获取的传动链发电机的转速信号及通过对转速进行微分计算后的加速度信号。可以看出,由转速直接微分计算加速度对噪声放大的作用十分显著。转速信号通过编码器获取时较光滑,一旦经过微分计算便存在大量毛刺,将加速度信号淹没。

图7 微分求解加速度的效果
将上述的转速和加速度信号进行频谱分析。如图8所示,WTS传动链的转速信号几乎不存在高频噪声;如图9所示,若对转速信号进行微分后,其得到的加速度信号中则存在大量的高频噪声。
因此,通过微分计算求解加速度的方式在实际工程中存在明显缺陷,需要对加速度计算进行改进优化。
3.2 基于状态观测器的改进策略
Luenberger观测器可以结合系统模型和实际输出对观测器进行校正,进而重构系统状态。该观测器针对线性系统具有良好的观测性能,比卡尔曼观测容易实现,同时不存在滑模观测的震颤等问题,在实际控制工程中应用广泛[19-25]。

图8 转速信号及其频响特性
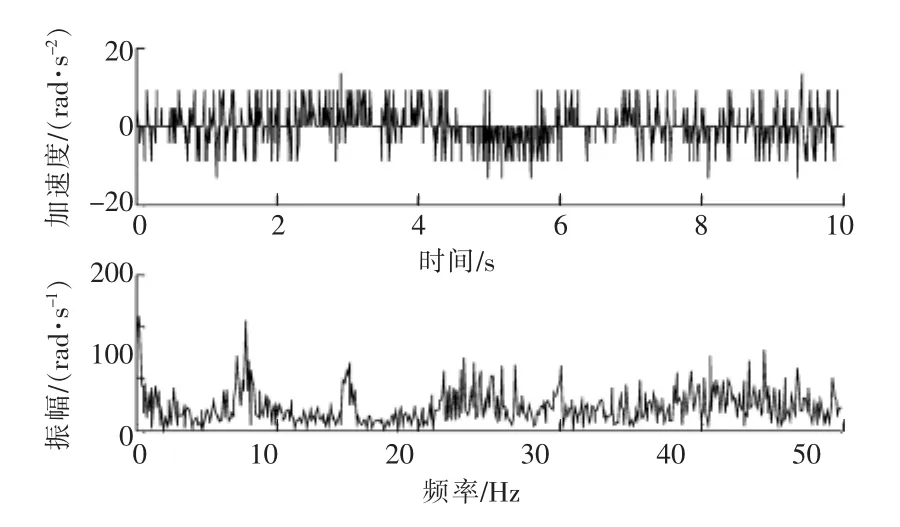
图9 加速度信号及其频响特性
本文采用Luenberger观测器对加速度的求解进行优化处理。如图10所示,在搭建Luenberger观测器时,将发电机转速ωg作为Luenberger观测器的信号输入,将发电机的转速加速度β作为输出。

图10 含Luenberger观测器的WTS模型
图中虚线框部分即为加速度观测器,其反馈校正系数Kp能够按发电机转速ωg变化改变相应加速度补偿量,从而让观测转速能及时跟上实际转速。这一改进可以在无法获得系统精准参数以及存在噪声干扰的条件下得到准确的加速度估计值。
观测器的反馈增益系数Kp越大,一方面会导致补偿量越大,使得观测器的跟踪ωg越快;另一方面观测器的响应速度也会越快,对噪声也越敏感[26]。因此在Luenberger观测器的设计中,反馈增益系数Kp具体数值的选取尤为重要。
Luenberger观测器的结构如图11所示,其传递函数可列写如下:

由式(11)可知,Luenberger观测器系统为二阶系统,其阻尼比和截止频率可根据加速度的精度、带宽等条件求出[20],之后可确定Luenberger观测器的反馈增益系数Kp与积分系数Ki。上文已提到Kp的取值在Luenberger观测器设计中很重要,其值过大会使观测器对噪声变得更敏感,过小则会使观测器的响应速度变慢跟不上,故要注意其值大小。
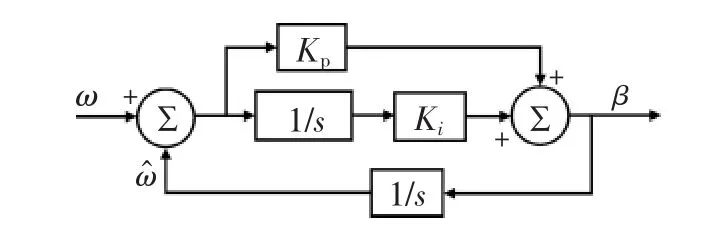
图11 Luenberger加速度观测器的基本结构
如图12所示,对使用了Luenberger观测器的风力机模拟器重新建模,其传动链模型的传递函数列写如下:

其中, ΔT=Ta/ng-Tg。

图12 含Luenberger观测器的WTS传动链模型
闭环特性方程为 D(s)=Jss3+JtKps2+JtKis=0, 劳斯阵为:

根据劳斯稳定的充要条件:

所以, 当 Kp>0, Ki>0 时, 含 Luenberger观测器的模拟风力机系统在连续系统里是稳定的。
4 考虑噪声抑制的风力机模拟器的实验验证
以基于直接微分求解加速度的WTS作为对照组,分析加速度频响特性[18],以观测转速数据与实际转速对比为评价指标,利用实验验证WTS对噪声抑制的效果。
实验平台相关设备的主要参数如表1所示。发电并网系统的发电机为PMSG(永磁同步发电机);实时数字模拟系统利用PLC完成实时转矩指令的计算,实现机械动态模拟;风轮模拟系统利用三相异步IM(感应电动机)结合机械飞轮来模拟实际风轮的气动转矩。

表1 风力机模拟器平台参数
Luenberger观测器有效性实验模拟的是NREL(美国国家可再生能源实验室)的CART3型风力机[22],采用的测试风速如图13所示,测试时间为120 s。
观测器采用如图12所示的结构,反馈增益系数Kp取1.5,积分系数Ki为0.001,PLC运行周期 T 为 0.01s。
实验结果如图14所示。图14(b)中Accel是对测量转速微分求解得到的加速度;图14(c)ObserverAccel是观测器观测得到的加速度;图14(a)是Luenberger观测器的观测转速AccSpd(观测加速度积分)与实际转速OperSpd的对比图。

图13 测试风速序列图

图14 发电机加速度及其频响特性
根据实验结果可以发现:状态观测器的ObserverAccel变化轨迹清晰,而Accel变化轨迹被噪声所覆盖,表明Luenberger观测器能有效观测加速度信号。
以实际转速OperSpd为基准值,可分别计算出观测转速AccSpd与其误差的极值和标准差,通过比较上述两者转速误差的极值和标准差,也可从另一个侧面分析Luenberger观测器的观测性能。具体结果如表2所示,可以看到:Luenberger观测器观测转速和实际转速的最大误差是6.66 r/min,两者误差的标准差是2.25。
为了掌握Luenberger观测器对噪声的滤波性能,还需对观测加速度进行幅频分析,结果如图15所示。经过与图9进行比较,可知在相同激励条件下,Luenberger观测器的观测加速度含有的高频噪声接近于0。因此本文提出的Luenberger观测器具有较强的滤波性能,观测结果具有有效性。

表2 Luenberger观测器的转速与实际转速对比

图15 发电机加速度及其频响特性
5 结语
本文分析了WTS传动链转速噪声对风机机械动态模拟的影响机理,指出了微分求解加速度会放大信号噪声,并明确了噪声抑制的必要性。在此基础上提出使用状态观测器来观测加速度信号的改进策略,同时根据此策略设计了考虑噪声抑制的风力机模拟器。最后,通过实验证明基于状态观测器的WTS能够有效抑制转速噪声,从而提高WTS机械动态模拟的准确性。
猜你喜欢
农业工程学报(2022年7期)2022-07-09
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
船舶与海洋工程(2019年6期)2019-12-25
中南大学学报(自然科学版)(2019年5期)2019-06-13
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年3期)2017-11-23
