
基于尺度不变特征变换的钢轨蠕变检测研究
2019-03-06 02:10张伟李曦王一军蒲浩
铁道科学与工程学报 2019年1期
张伟,李曦,王一军, ,蒲浩
基于尺度不变特征变换的钢轨蠕变检测研究
张伟1,李曦2,王一军1, 2,蒲浩3
(1. 中南大学 信息科学与工程学院,湖南 长沙 410083; 2. 中南大学 软件学院,湖南 长沙 410075;3. 中南大学 土木工程学院,湖南 长沙 410075)
针对钢轨现有定点蠕变检测技术的不足,提出一种基于尺度不变特征变换及图像配准的非接触式实时观测方法。通过安装于轨侧观测桩上的相机对待检钢轨进行拍摄,提取图像中轨腰附近预定义的感兴趣区域,而后基于尺度不变特征变换,与同一视场中钢轨未蠕变图像的对应感兴趣区域进行配准,得到定场环境下多关键点在像素坐标系中的轨向及高低位移集。根据相机的内外及畸变参数将像素位移集映射到世界坐标系,对轨向及高低位移集分别求均值,得出钢轨的轨向及高低蠕变量。为验证方法的有效性,搭建试验平台并采用OpenCV开发了仿真系统。研究结果表明:高低和轨向蠕变的相对测量误差均值分别低于0.606%和1.170%。
铁路工务;钢轨蠕变检测;尺度不变特征变换;图像配准
在列车载荷、温度力以及路基融沉冻胀等因素的作用下,轨道的物理形态时刻发生着变化。其中,沿轨道延伸方向的爬行称为轨向蠕变,沿垂直方向的升降称为高低蠕变。对钢轨的蠕变检测,一般可通过线路的平顺性检测实现:人工操作便携式测量仪器[1−2]等方式是目前所采用的主要现场作业模式;动检列车[2]对线路进行的定期高速巡检具有检测速度快、检测结果可为人工作业提供宏观指导等优点。近年来,高铁运行方式与传统工务作业模式的矛盾日益突出:高铁线路普遍采用单根长度可达数千米的无缝钢轨,温度力诱发的轨向蠕变更为显著,且无法通过传统方式进行有效的实时检测;在非天窗期,高铁线路禁止一切临近路基的现场作业;高速巡检方式获得的是钢轨在载荷状态下的动态蠕变。因此,现行工务作业模式已无法满足对钢轨进行定点实时蠕变观测的需要,为此,已有部分前期研究进行了相关探索:定点接触式,一般通过在钢轨或轨道板间安装传感器,实现钢轨蠕变的实时测量。傅勤毅等[3]通过安装于轨道板和钢轨之间的直线位移传感器实现了轨向蠕变的实时测量,并将结果通过ZigBee等通信技术传输到远端服务器;YAN等[4]将相邻轨枕间的钢轨简化为简支梁,通过黏贴在轨腰部位的光纤光栅传感器,实时检测了因列车运行造成的钢轨应变。该种方式决定了无法检测因路基沉融冻涨等诱发的钢轨与支撑物整体迁移式蠕变,且存在影响工务现场作业的可能;定点非接触式,一般通过安装在轨侧观测桩上的光学设备,对钢轨进行定场拍摄,采用计算视觉等技术计算钢轨的蠕变状态。吴湘华等[5]采用基于直方图匹配的方法跟踪涂刷在轨腰部位的定位标靶并计算其质心,而后与“零时”质心比较,得到了钢轨的高低蠕变量。采用光学设备实现的非接触式实时测量,具有设备易于维护且不影响工务现场作业的优点,但受气象条件及标靶污损[5]的影响,限制了其全天候性能。采用传感网络对铁路基础设施进行在线感知[6],进而实时评估其服役状态,已成为铁路智能运输系统的研究热点。为此,针对钢轨蠕变非接触实时检测技术的不足,提出基于尺度不变特征变换(Scale Invariant Feature Transform,SIFT)[7]及图像配准[8]的检测方法,并进行仿真实验。同文献[5]提及的方法比较,其优点在于:通过对一张现场照片的处理,可同时获得钢轨上多个关键点相对于观测原点的轨向和高低蠕变位移。对多点位移进行再处理,在一定程度上消除了定位标靶[5]污损及气象条件造成的影响,进一步提高了测量精度,增强了算法的鲁棒性和泛化能力。
1 尺度不变特征变换
为了减少现场气象条件对蠕变测量的影响,采用SIFT[7]作为钢轨图像感兴趣区域(Region of Interest,ROI)[9]特征点的描述子,为此,定义图像(,)的尺度空间函数(,,):




式中:和σ+1分别是同一Octave中2个相邻图像的尺度因子。采用式(3)对每一个Octave中两两相邻的图像依序差分,直到所有的Octave差分完毕,得到新的图像序列构成了DOG金字塔。对于1幅DOG图像中的对应点,分别与同层及上下2层图像中总计26个相邻点值比较,若其值为最大或最小,则可以判定该点为离散DOG空间的关键点。为了精确定位连续空间的关键点及对应的尺度因子,对式(3)进行二阶Taylor展开:

式求导并令导数等于0,可求得偏移量:

将式(5)代入式(4)得:


根据上述过程:SIFT描述子在一定程度上克服了尺度变化、旋转、形变、光照及其它噪声的影响,具有较强的鲁棒性,因此更加适合野外环境下钢轨蠕变定点观测的需要,进一步提高了观测系统的亚全天候性能。
2 基于图像配准的钢轨蠕变检测
为在一定程度上克服观测部位污损对测量结果的影响,提出基于图像配准的钢轨蠕变检测方法。该方法通过固定安装在轨侧观测桩上的工业相机,首先拍摄钢轨未蠕变图像并在具有显著特征的部位预定义ROI,而后采用SIFT获取ROI中的标准关键点集;在后继的实时测量过程中,对每次拍摄的定场钢轨图像,同样通过SIFT获取相同ROI范围内的实时关键点集,并与进行配准,可在定场环境下得到多关键点相对于观测原点的像素位移集,对其中的每个元素进行标定变换,可得到钢轨的高低及轨向蠕变量。算法流程如图1所示。
根据图1,钢轨蠕变检测流程由以下2部分 组成。
1) 安装调试过程
该过程的主要工作之一是为了提高测量精度而进行的相机标定。考虑径向和切向畸变,相机坐标系中点(,)投影到像素坐标系中点(,)由下述方程决定:



蠕变观测的目的,是检测钢轨相对于观测原点的位置迁移,而在相机的视场范围内,还包含了除钢轨之外的其他对象,为此在钢轨未蠕变图像拍摄完毕后,选择轨腰部位具有显著特征(可为人工涂刷的标志图案)的区域作为ROI,并采用SIFT算法提取标准关键点集,以方便蠕变检测的实现。
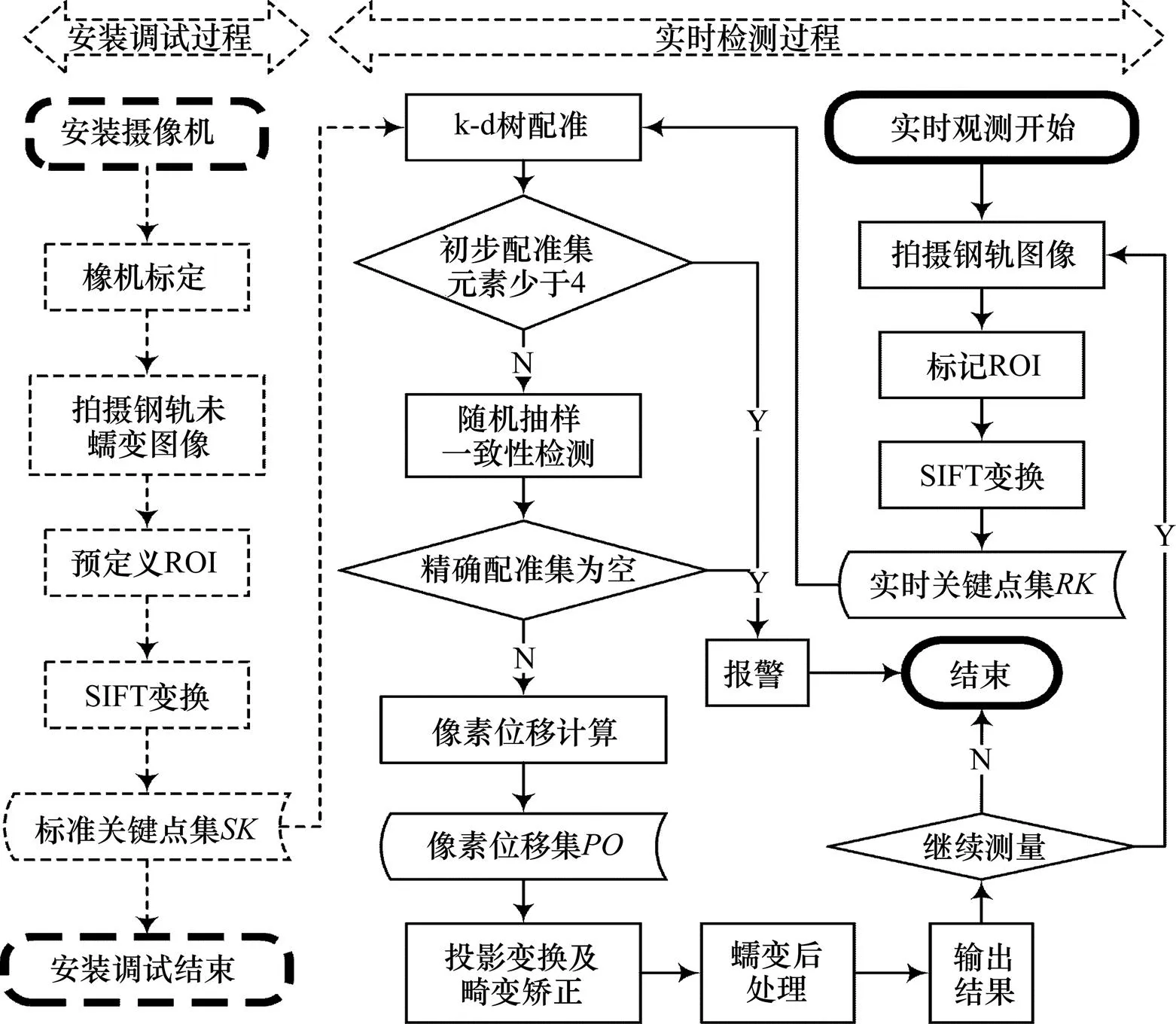
图1 钢轨蠕变检测流程
2) 实时检测过程
对于现场固定安装相机所实时拍摄的定场图像,首先采用SIFT算法从安装调试过程中已预定义的ROI区域提取实时关键点集,钢轨蠕变过程可视为中的某些关键点迁移到中与之对应配准点的过程。即对于特征点

成立,则认为此时0所对应的关键点为的配准点。为了配准过程的快速实现,采用k-d Tree[12]为中所有关键点建立SIFT属性空间的树形索引结构,采用改进的最近邻搜索算法-最优节点优先(Best-Bin-First,BBF)算法[13]改善因特征向量维数过高所造成的搜索效率下降问题,结合式(12)得到了与的初步配准点对集,而后通过随机抽样一致性(RANdom SAmple Consensus,RANSAC)[14]算法消除误匹配,并最终得到精确配点对集:

图2 钢轨蠕变示意图
Fig. 2 Schematic diagram of rail creep
图2中,点是点的蠕变对应点,′表示未蠕变钢轨的位置,′是蠕变后的位置。则根据轨向和高低蠕变的定义及视场范围内钢轨的刚体特征:′A//B′。′平行于轴,则,分别是′及与轴的夹角。令′⊥′A,A′⊥B′,则和′(或′)分别代表了轨向蠕变量和高低蠕变量:



3 仿真实验
为了验证测量方法的有效性,搭建了实验平台并基于OpenCV2.4.9开发了测量软件。
3.1 实验设备及方案
试验平台中所使用的主要设备参数如表1所示,设备组装过程如图3所示。

表1 主要实验设备
图3为主要设备组装示意图。将三轴滑台测微仪固定在底座上,轨道模型固定在测微仪的顶端,可通过调节测微仪的,轴旋钮使得轨道模型在水平和垂直方向移动,实现轨向和高低蠕变的模拟。工业相机通过万向球头及水平和垂直调节支架安装在支座上,通过USB接口与计算机连接,相机距离轨道模型约1 m。调整镜头光圈及焦距,使计算机中的图像清晰,同时观察轨道模型的图像,通过球头及调节支架微调相机姿态,使相机光轴垂直于轨道,且轨底边缘与图像边缘平行,再次调节镜头光圈及焦距,使图像处于最清晰状态。
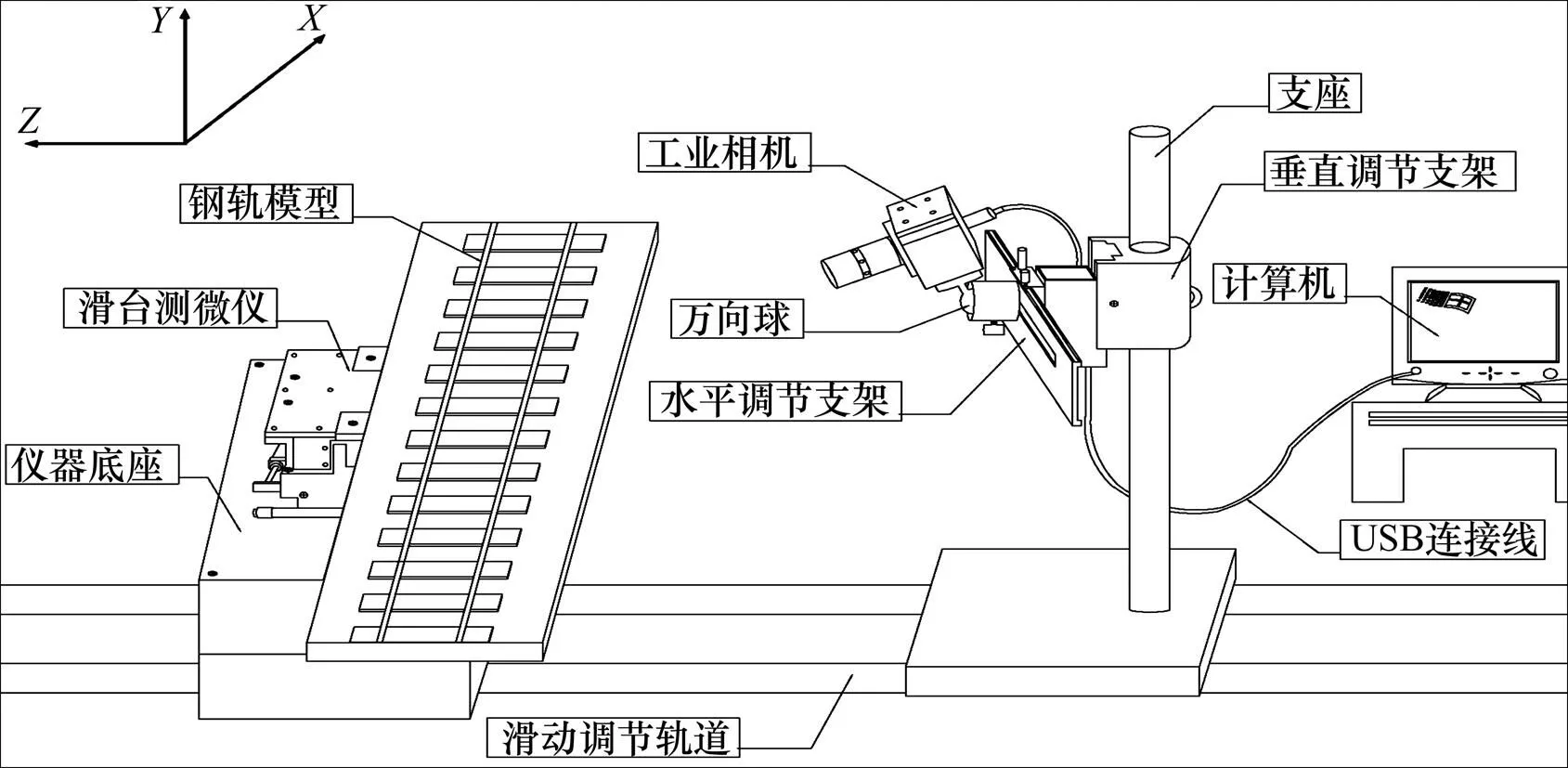
图3 实验设备组装示意图
采用黑白棋盘格板及开发的测量软件对相机进行标定,将测微仪轴均处于0刻度时的图像作为钢轨的未蠕变图像,选择其中一条钢轨作为测量对象,采用手动方式在轨腰部位定义ROI (1 500*40像素)并提取标准关键点集。调整测微仪轴到零刻度,以0.2 mm为步长,而后沿轴按位移渐次增加的方向使轨道模型滑动,每次滑动后拍摄照片并采用测量软件的实时检测过程处理,同时记录测量结果,直到轴方向达到最大量程,总计获得25个测量结果;当轨向蠕变测量完毕后,调节测微仪使轴刻度归0,然后按照相同的规则测量高低蠕变并记录测量结果。
3.2 测量结果分析
根据实验方案及图1给出的测量原理:中包含了720个标准关键点;在后继的每次轨向及高低蠕变测量过程中,分别得到了多个蠕变配准点对,其数量变化过程如图4所示。
其中,图4(a)给出了每次轨向蠕变测量的配准点对数量变化,图4(b)给出了每次高低蠕变测量的配准点对数量变化。采用式(16)对每次测量得到的轨向或高低蠕变集进行处理,可分别得到对应的轨向或高低蠕变值。轨向蠕变的测量偏差及相对误差如图5所示。
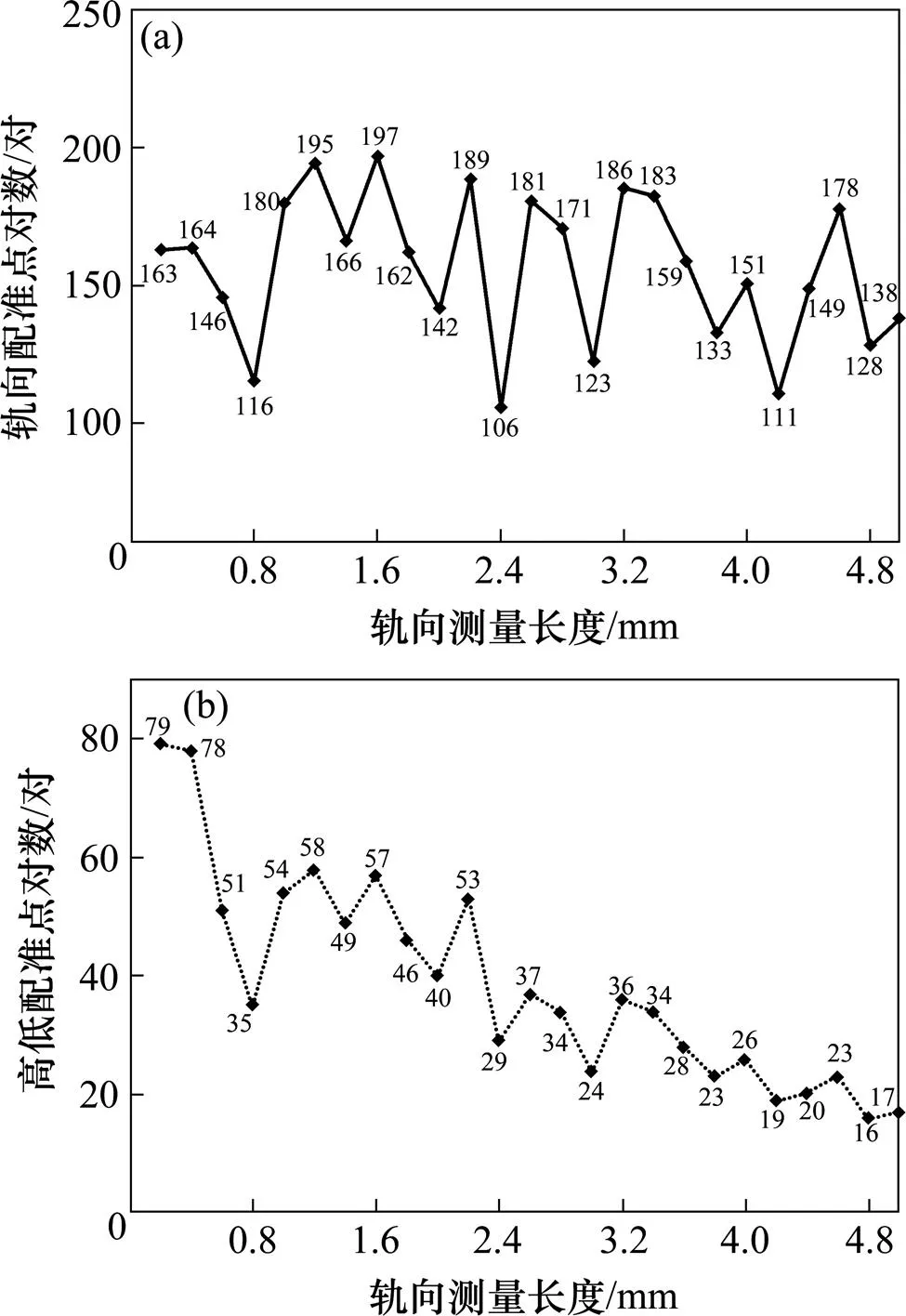
(a) 轨向蠕变配准点对数变化;(b) 高低蠕变配准点对数变化
其中,图5(a)为轨向蠕变的测量偏差,图5(b)为轨向蠕变测量的相对误差。据图可知:测量偏差介于−0.006~0.040 mm之间,且自第3次测量开始,所有偏差均为正值;相对误差介于0.182%和3.333%之间,且随着测量范围的增加,相对误差逐渐减小并基本趋于稳定,相对误差均值为1.170%。高低蠕变的测量偏差及相对误差如图6所示。

(a) 轨向蠕变测量偏差曲线;(b) 轨向蠕变测量相对误差曲线

(a) 高低蠕变测量偏差曲线;(b) 高低蠕变测量相对误差曲线
其中,图6(a)为高低蠕变的测量偏差,图6(b)为高低蠕变测量的相对误差。据图可知:测量偏差介于−0.02~0.011 mm之间,偏差负值居多;相对误差介于0.045%和2.5%之间,且随着测量范围的增加,相对误差逐渐减小并基本趋于稳定,平均相对误差为0.606%。
3.3 误差限分析

在仿真过程中,相机距离钢轨模型约1 m,标定完毕后,在图像中选择(0,0),(1,0),(0,1)3点并根据式(17)得:=0.086 mm;=0.096 mm。即轨向和高低的理论误差限分别为±0.086 mm和±0.096 mm。根据图5(a)和图6(a)可知,轨向和高低的测量误差限均小于理论误差限,该结论间接证明了SIFT特征的亚像素特性,并可在一定程度上提高测量精度。
4 结论
1) 采用具有旋转平移不变性及可克服光照影响的SIFT特征作为关键点的描述子,可在一定程度上提高现场观测的亚全天候能力。
2) 在定场条件下,通过图像配准实现了钢轨即时图像与标准图像的蠕变跟踪,达到了高低及轨向蠕变同时测量的目的。
3) 通过1次拍照及配准计算,获得了对应感兴趣区域内的多个配准点对,可在一定程度上克服跟踪标靶污损形成的测量误差。
4) 仿真实验结果表明,实际检测误差限小于理论误差限,SIFT特征具有亚像素特征,可提高测量精度。
5) 在仿真实验中,分别将轨向和高低蠕变集的均值作为各自的蠕变结果,该方法不能消除系统误差的影响,在实际工程应用中可通过平差等方法进一步提高测量精度。
[1] 蔡德钩. 高速铁路季节性冻土路基冻胀时空分布规律试验[J]. 中国铁道科学, 2016, 37(3): 16−21. CAI Degou. Rest on frost heaving spatial-temporal distribution of high speed railway subgrade in seasonal frozen region[J]. China Railway Science, 2016, 37(3): 16−21.
[2] XU Peng, LIU Rengkui, SUN Quanxin. Dynamic-time- warping-based measurement data alignment model for condition-based railroad track maintenance[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 799−812.
[3] 傅勤毅, 彭亚凯, 王超. 基于ZigBee技术的无缝钢轨爬行监测系统设计[J]. 铁道科学与工程学报, 2016, 13(12): 2478−2482. FU Qinyi, PENG Yakai, WANG Chao. Design of continuously welded rail crawling monitoring system based on ZigBee[J]. Journal of Railway Science and Engineering, 2016, 13(12): 2478−2482.
[4] YAN Lianshan, ZHANG Zhaoting, WANG Ping, et al. Fiber sensors for strain measurements and axle counting in high-speed railway applications[J]. IEEE Sensors Journal, 2011, 11(7): 1587−1594.
[5] 吴湘华, 季天莹, 陈峰. 钢轨爬行及路基表层冻胀检测技术[J]. 铁道科学与工程学报, 2015, 12(3): 515−520. WU Xianghua, JI Tianying, CHEN Feng. Detection technology of railway subgrade frost heave and rail crawling[J]. Journal of Railway Science and Engineering, 2015, 12(3): 515−520.
[6] Hodge V J, Simon O K, Michael W. Wireless sensor networks for condition monitoring in the railway industry: A survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(3): 1088− 1106.
[7] David G L. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91−110.
[8] Sourabh P, Umesh C P. Remote sensing optical image registration using modified uniform robust SIFT[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(9): 1300−1304.
[9] LI Tong, ZHANG Junping, LU Xiaochen. SDBD: A hierarchical region-of-interest detection approach in large-scale remote sensing image[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(5): 699−703.
[10] 王凤艳, 黄润秋, 陈剑平. 基于计算机视觉和测量平差理论的相机标定[J]. 吉林大学学报(工学版), 2017, 47(3): 944−951. WANG Fengyan, HUANG Runqiu, CHEN Jianping. Camera calibration based on computer vision and surveying adjustment fundamentals[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(3): 944−951.
[11] ZHANG Zhengyou. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330−1334.
[12] 张贵安, 袁志勇, 童倩倩. 层次结构K-d树的立体图像快速匹配方法[J]. 软件学报, 2016, 27(10): 2462−2472. ZHANG Guian, YUAN Zhiyong, TONG Qianqian. Fast and hierarchical K-d tree based stereo image matching method[J]. Journal of Software, 2016, 27(10): 2462− 2472.
[13] LIU Haifeng, DENG M, XIAO Chuangbai. An improved best bin first algorithm for fast image registration[C]// Electronic and Mechanical Engineering and Information Technology, 2011 International Conference on Harbin: 2011: 355−358.
[14] WU Yue, MA Wenping, GONG Maoguo. A novel point-matching algorithm based on fast sample consensus for image registration[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(1): 43−47.
Research on rail creep detection based on SIFT
ZHANG Wei1, LI Xi2, WANG Yijun1, 2, PU Hao3
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;2. School of Software, Central South University, Changsha 410075, China; 3. School of Civil Engineering, Central South University, Changsha 410075, China)
According to the defects of existing rail creep detection technology, a non-contact real time observation method was proposed based on scale invariant feature transform (SIFT) and image registration. This method captured image of rail to be detected by a camera mounted on the observation pile, extract the predefined region of interest (ROI) which is registered with corresponding ROI of non-creep rail image in the same field of view, finally, the offset set of track and vertical direction of multi key points in the pixel coordinate system was obtained under the fixed field of view. Mapping the pixel offset set to the world coordinate system based on the all parameters of the camera, the creep value of the track and vertical direction can be calculated by computing the mean value of all elements in the offset set of track and vertical direction separately. In order to verify the effectiveness, the test platform was built, and the simulation system is developed with OpenCV, the experimental results show that the mean value of relative measurement error of track and vertical direction is less than 0.606% and 1.170% respectively.
railway maintenance; rail creep detection; scale invariant feature transform; image registration
10.19713/j.cnki.43−1423/u.2019.01.006
U216
A
1672 − 7029(2019)01 − 0042 − 08
2017−12−25
高铁联合基金资助项目(U1734208)
蒲浩(1973−),男,四川南充人,教授,博士,从事铁路线路数字化设计研究;E−mail:haopu@csu.edu.cn
(编辑 涂鹏)
猜你喜欢
铁道建筑(2022年7期)2022-08-06
建材发展导向(2022年3期)2022-04-19
中国铁路(2022年5期)2022-01-01
今日农业(2021年8期)2021-11-28
建材发展导向(2021年11期)2021-07-28
读者(2019年20期)2019-10-09
环球时报(2019-01-04)2019-01-04
中国国家旅游(2016年3期)2016-09-21
小学阅读指南·高年级版(2016年1期)2016-09-10
新高考·高一物理(2015年5期)2015-08-18
