
基于嵌入式开发的智能桌子
2019-03-07 05:22金熠陈蕾蔺亚鹏王宏杰张本昌李龙龙
电脑知识与技术 2019年36期
金熠 陈蕾 蔺亚鹏 王宏杰 张本昌 李龙龙

摘要:随着科技水平的不断发展,除了带给我们无限便利之外,也给我们的身体健康和身体素质带了隐患,工作族成天坐着面对电脑工作,而学生长时间的学习和娱乐导致了驼背、坐姿不端正等不良的习惯的养成,危害了学生的正常的生长发育健康,容易引发颈椎病和偏头痛等症状等一系列病状。本文介绍的是一款基于嵌入式开发的智能桌子,主要服务于学生和办公人群,有效的纠正他们的不良的学习办公时的行为习惯,保护使用者的健康,让他们在学习工作之余,也改掉自己潜移默化的坏习惯。
关键词:智能;自动调节;自适应
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2019)36-0248-03
1概述
许多上班族和学生党普遍存在着弯腰驼背等不良习惯,根本在于长时间的久坐和不良的坐姿。传统的桌椅无法调节垂直高度和水平高度,往往让使用者无法用最舒适的姿势进行办公和学习,不佳的距离会降低使用者的工作效率,影响用户的体验感觉,久而久之甚至会产生一系列疾病。而智能桌子相比于以往桌子的优势在于能根据用户的身高自动调节桌子的水平距离,使用户能够在一个舒适的环境下进行工作,同时也能够改正用户的不良坐姿习惯,增加用户的体验感觉。
2模块与应用
2.1 arduino主控板控制板
本实验所采用的芯板是Arduino Mega2560开发板,选用Arduino Mega2560开发板的主要原因是,它的微控制器可以通过Arduino的編程语言来编写想要实现的程序。而Arduino它具有类似java语言和C语言的开发环境,对于学院开设的专业课,能够更快速的学习和使用Arduino编写想要控制传感器、电感和其他硬件设备。本设计中,arduino主控板控制板主要控制四个驱动电机,四个推杆和两个传感器,通过ardulno提供的arduino IDE程序开发环境中编写控制和实现这些硬件和功能的代码。arduino IDE对于学习过java、C语言或者其他编程语言的使用者来说,很容易掌握,不需要太多的编程基础。ardui-no主控板还在芯板上设计了保险丝,用于在实验中短路或者电流过大保护芯板的装置,大大延长了芯板的使用寿命,降低的实验的危险性,以下是这次设计所用的Arduino Mega2560开发板,如图l所示:
2.2步进电机驱动模块
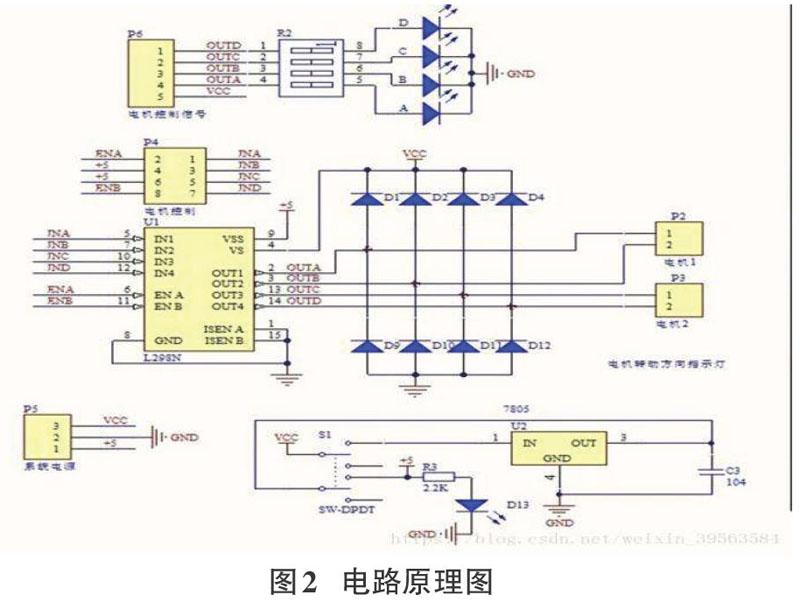
本产品采用的是L298N电机驱动板模块直流电机马达L298N有两个供电,一个是逻辑控制部分的5伏供电,一个是电机的供电,实物图中标注的12伏是给电机供电的,所以不接的话,电机没电,不转。稳压管的输入和输出有个压差,如果给电机的供电太低的话(比方说只有5v),通过压差后可能会降低太多,那么逻辑控制部分所要求的5v电压可能就达不到了,此时需要将板上5伏使能断开,然后外接Sv的电源来给逻辑控制部分供电。接下来是电路原理图和使用说明参数图:
2.3超声波传感器
本次实验中,所使用的传感器是HC-SR04 US-100 US-015超声波模块传感器,它的主要作用是用于测距。在实际中,有着广泛的应用,大到航天航母,小到家具用品,而且在医学设备上也有着广泛的应用,用于诊断疾病,而且诊断准确率较高。传感器通过超声波在空气介质中的飞行时间差就能确定人体的身高,在发送脉冲的同时,接收器的计时器启动并计数,直至接收传感器接收反射回波后,计数停止,芯片得到这个时间然后计算出距离,从而可测算出测量仪与头顶之间的距离,即人体的身高,相比人体红外传感器感应距离,更加的精确和方便。
2.4调降压模块
本模块使用的LM2596芯片,优点在于:1.效率高(转换率92%),发热量小,能很轻松带起3A(短时间)以上电流。2.使用机器贴片,回流焊接,同时每个模块出货前都经过两个小时的老化测试,确保高可靠性。3使用低ESR的原装三洋滤波电容,可以使纹波电压低至30mV,完全能和线性电源媲美!输入为3V到40V输出为1.5V至35V,电压连续可调,高校效率最大输出电流为1.3A,本产品全部使用SANYO固体电,36u加厚线路板,高O值大功率电感,带LED显示灯。
LM2596芯片工作原理:
LM2596实物图:
2.5电动推杆
电动推杆它是一种小型的传动件,本实验中用用电动推杆主要是实现桌子的移动和运动,电动推杆的工作原理是将电动机的旋转运动转换成推杆的直线伸缩距离。程序控制,依靠计算脉冲数量来得到马达转动的圈数,在现实社会中有着广泛的用途,在本次实验中,电动推杆是必不可少的,如图所示:
3工作原理
本实验中,先将编写好的程序导人芯片中,芯片通过程序指令驱动输入口,使得接口引脚初始化,同时进行超声波输入输出口引脚的初始化,当初始化完成之后,进入循环,然后设置脉冲向超声波产生发生信号,等待超声波响应并计算距离。得到这个距离后,如果距离大于设定值,程序驱动伸杆,是桌子向上移动一定的距离,如果距离小于所设定的距离,电机反转,伸杆向下移动一定的距离,如果距离刚好和设定的值一致,则伸杆不进行工作。同理,也就能够实现水平的运动。
4功能及范围
许多上班族和学生因为其职业限制,避免不了长时间的久坐,加上自己本身坐姿不正的不好习惯,容易形成驼背,腰椎间盘容易突出,颈椎病等许多疾病,这些不好的习惯在无声无息中损害了白身的健康,甚至会影响自身的骨骼发育。而智能桌子将通过控制桌子的垂直运动和水平运动,根据不同身高的学生,经过数据分析后,桌子会自动调至相应合适的高度和适宜的离人距离,来规范使用者学习时的姿势,比如较矮的使用者,桌子的垂直高度会比正常时略低,而在水平上,会相应地距离人更近,反之,桌子的垂直高度会偏高,离人距离将会更远。智能桌子将会提供一个舒适的学习和办公的条件,同时保护使用者的身体健康。
5实验结果
在实验阶段,智能桌子能够相对准确地控制桌面的高低和桌面相对人的距离,不同身高的人在桌子面前,智能桌子的水平调节和垂直调节的距离是不一样的。
参考文献:
[1]蔡睿妍.Arduino的原理及应用[J].电子设计T程,2012,20(16).
[2]纪欣然.基于Arduino开发环境的智能寻光小车设计[J].现代电子术,2012,35(15).
[3]熊慧,邱博文,刘近贞.开源平台Arduino硬件生态扩充研究[J]实验室研究与探索,2019,38(16).
[4]杨继志,郭敬.Arduino的互动产品平台创新设计[J].单片机与嵌入式系统应用,2012,12(4).
[5]蔡卓凡.基于Arduino和Android教室移动巡检系统设计[J].电子科技,2014,27.
[6]崔阳,张维华,白云峰.一种基于Arduino的智能家居控制系统[J].电子技术应用,2014,40(4).
[7]杨立英.基于Arduino单片机的太阳能智能充电控制器监测系统设计[J].计算机测量与控制,201 9,27(6).
【通联编辑:梁书】
收稿日期:2019-10-09
作者简介:金熠(199 8-),男,浙江绍兴人,本科,就读于甘肃农业大学,主修java编程,后台开发;陈蕾(197 8-),女,通讯作者,重庆巴县人,硕士,副教授,主要研究领域为智能算法与模式识别。
猜你喜欢
表面工程与再制造(2019年6期)2019-08-24
中国教育信息化·基础教育(2016年11期)2016-12-27
汽车科技(2016年5期)2016-11-14
中国新通信(2016年16期)2016-10-18
