
一种基于松组合导航系统的车载试验方法
2019-03-14 01:23
福建质量管理 2019年4期
(陕西科技大学 陕西 西安 710000)
一、引言
车载试验是惯性导航飞行控制器系统研究的重要试验方法,具有经济、方便等优势。车载试验是指将导航系统安置在试验车辆上,导航系统正常上电启动,待初始化和对准完成后,开始进入导航,从导航开始,试验车在所选路线上以一定速度行驶,记录导航系统输出数据,以评价导航系统的性能。进行车载试验的主要目的有:
(1)通过车载试验,对产品交付前进行考核,暴露设计、研制与使用的缺陷,以便进行改进和完善;
(2)考核导航系统在运动条件下的定位精度、速度精度、航向精度;
(3)考核导航系统输出信息的连续性、稳定性、正确性。
二、试验方案
(一)车载试验系统组成

图1 车载试验系统组成图
(二)试验方法
(1)将标定好的控制器和高精度POS系统同时安装固定在专用试验车上,并利用专用测试工控机记录下控制器组合导航实时解算数据、高精度POS系统的实时数据输出便于事后处理;
(2)载车静止5分钟同时采集数据,载车开始行驶,IMU进入基于GPS速度信息辅助的初始对准,要求在对准期间试验车至少进行一次加减速机动(或者转弯等机动);
(3)由于POS系统精度远高于一般的惯导精度,所以可将POS系统输出的导航结果作为参考基准,可以对导航姿态、速度和位置误差进行考核。

图2 试验数据采集时序图
车载试验的线路选择原则是:道路的选取要保证在形式过程中GPS信号正常,线路周围不会有高大建筑物等对GPS信号产生影响,期间有平路、陡坡,路径长度合适。
(三)试验要求
(1)仪器设备的安装、固定要牢固,控制器系统、高精度POS系统通过过渡板连接到试验车车厢铝板上,保证在试验过程中两套导航系统之间不会发生相对位置变化;
(2)车载试验的线路选择原则是:道路的选取要保证在行驶过程中GPS信号正常,线路周围不会有高大建筑物等对GPS信号产生影响,期间有平路、陡坡,路径长度合适。
三、试验结果分析
下图3为车载试验的速度误差结果,δVE、δVN、δVU分别为东向速度误差、北向速度误差和天向速度误差;下图4为车载试验的位置误差结果,δL、δλ、δh分别为纬度误差、经度误差和高度误差。
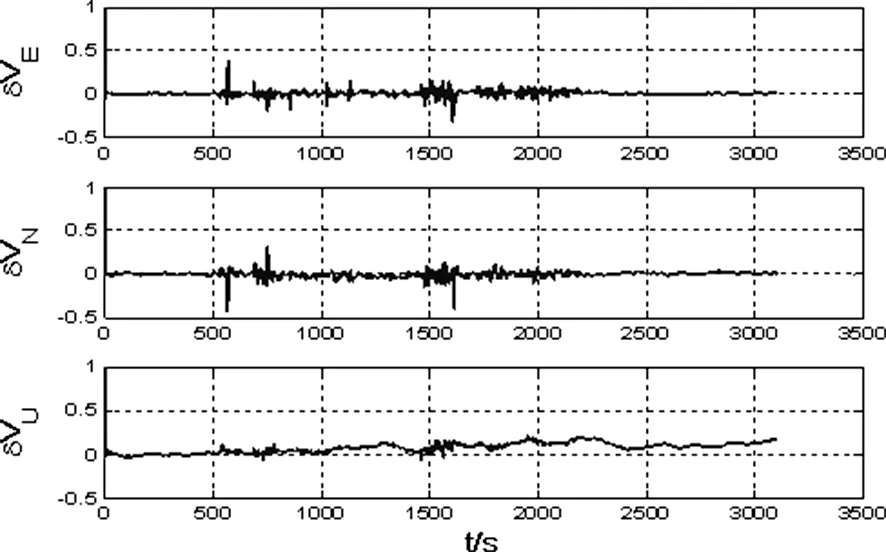
图3 速度误差结果图
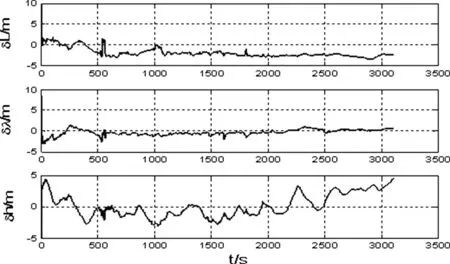
图4 位置误差结果图
误差结果是通过MATLAB将高精度POS系统的输出结果和控制器组合导航输出结果进行求差后得到的。

表1 车载试验精度统计结果与指标对比
表中误差值为误差的均方根。
通过控制器系统指标要求和车载试验结果对比,可以看出试验结果能够满足技术指标的要求。
四、总结
本文通过对车载试验方案的介绍和对某飞行控制器系统车载试验结果的分析,可以得出车载试验是考核组合导航系统是否满足技术指标要求的经济、方便、有效的试验方法。对后期发展组合导航算法验证和飞行控制器系统系列化产品的考核和验收具有重要的意义。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
煤气与热力(2021年12期)2022-01-19
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
百科探秘·航空航天(2016年9期)2016-12-01
筑路机械与施工机械化(2014年4期)2014-03-01
