永磁同步电机电流测量误差补偿控制
2019-03-26 08:31王红艳
微电机 2019年12期
王红艳
(许昌学院 电气/机电工程学院,河南 许昌 461000)
0 引 言
永磁同步电机(PMSM)具有功率密度高、效率高、动态控制响应快等优点,在电动汽车、机器人等工业驱动领域得到了广泛的应用[1-3]。采用矢量控制的PMSM通常采用两个或三个电流传感器来测量电机的相电流,由于热漂移、老化、检测元件间的兼容性等因素电流测量值通常会出现误差[4]。电流测量误差将会使电机发生明显的基频或两倍基频的转矩脉动和转速脉动[5-6],同时也会使电压源型逆变器的死区补偿性能下降,严重影响了PMSM驱动系统的调速性能[7]。
近年来,各工业领域对电机调速性能的要求越来越高,电流测量误差的影响引起了广泛的关注。文献[5]和文献[6]分别提出了对d轴电流进行分段积分和消除q轴电流测量误差的补偿策略,但是都只对电流测量误差进行了部分补偿。文献[8]提出了一种抗混叠滤波器,对偏移误差的补偿效果比较好,但不能对增益误差进行有效补偿。文献[9]提出一种基于搜索的电流检测算法,但不适用于电压发生畸变的情况。文献[10]提出一种滑模自适应控制器,通过在线调整电流给定值有效减小了转矩脉动,但不能对电流测量误差本身进行补偿。综上所述,现有的电流测量误差补偿方法均没有考虑外环控制器的干扰。
本文针对采用矢量控制的PMSM,首先分析了电流PI控制器指令值与存在电流测量误差时的实测电流之间的关系,进而提出了一种电流测量误差补偿策略。在同步静止坐标系中,通过从实测电流中减去低通滤波的电流指令值,提取出电流测量误差分量。在提取电流测量误差的减法过程中,有效地消除了外环控制器中电流指令值扰动的干扰,并能显著提高电流测量误差补偿器的动态控制性能。本文所提出的电流测量误差补偿策略不需要任何机械参数,对电机电气参数的变化较不敏感,结构简单,易于实现。
1 电流测量误差分析
表贴式永磁同步电机(SPMSM)在d-q同步旋转坐标系中的电压方程[11-12]:
(1)
式中,ud、uq分别为三相定子绕组的d、q轴电压分量,id、iq分别为三相定子绕组的d、q轴电流分量,Rs为定子绕组相电阻,Ls为定子绕组电感,ω为转子电角速度,ψf为永磁体产生的磁链。
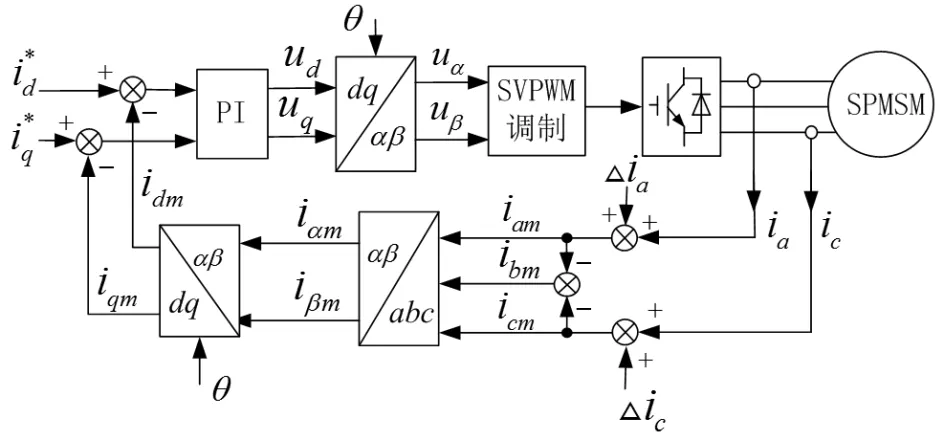
图1 SPMSM矢量控制框图
三相定子相电流的测量值、实际值和测量误差间的关系为
(2)
三相电流iam、ibm、icm经Clark变换和Park变换后,在d-q同步旋转坐标系中的定子电流测量值可用:
(3)
式中,id、iq分别为d、q轴定子电流的实际值,由ia、ib、ic经过Clark变换和Park变换得到;Δid、Δiq分别为d、q轴定子电流的测量误差,由Δia、Δib、Δic经过Clark变换和Park变换得到,化简后可将Δid、Δiq为
(4)

采用矢量控制的SPMSM在d-q旋转坐标系下的解耦控制框图如图2所示,电流调节器采用PI控制器,kpd、kid和kpq、kiq分别为d轴和q轴PI控制器的比例、积分系数。

图2 同步解耦电流PI控制框图
设置电流调节器的截止频率为ωc,d轴PI控制器的参数设置为:kpd=Lsωc,kid=Rsωc。由图2可推导出d轴电流的实际值为
(5)
将式(5)代入式(3),得到d轴定子电流的测量值为
(6)
同理,可得q轴电流的测量值为
(7)
由式(6)和式(7)可知,d、q轴定子电流测量值均包含3个分量:低通滤波的d、q轴电流给定值、高通滤波的电流测量误差和带通滤波的电流测量误差。并且,d轴测量误差Δid出现在q轴电流测量值iqm的表达式中,q轴测量误差Δid出现在d轴电流测量值idm的表达式中,即d、q轴的带通滤波测量误差相互交叉耦合。
2 电流测量误差补偿策略
2.1 外环控制器干扰的抑制
由式(6)和式(7)可知,在d-q同步旋转坐标系中,定子电流测量值idm、iqm中的高通和带通滤波电流测量误差项的频率均与定子电流的基频频率相同,经Park反变换后,在α-β静止坐标系中将变为直流量。因此,要实现对定子电流测量误差的补偿控制,可以从定子电流测量值中提取测量误差分量,经Park反变换转换为α-β坐标系下的直流分量,调整补偿信号使α-β坐标系下的的直流分量降为零即可。
由式(6)和式(7)可知,从d、q轴定子电流测量值idm、iqm中减去低通滤波的d、q轴定子电流指令,即可提取出d、q轴定子电流测量误差分量Δidm、Δiqm分别为
(8)
(9)
从式(8) 和式(9)可以看到,d、q轴定子电流测量误差分量Δidm、Δiqm中不包含d、q轴定子电流的指令值,因此,由外环控制器作用引起的电流指令值的波动将不会影响提取的电流测量误差Δidm、Δiqm。根据式(8) 和式(9)进行电流测量误差补偿,可以有效抑制外环控制器的干扰,因此该补偿策略将具有很好的动态性能。
2.2 电流测量误差的补偿
根据式(4),可将式(8)和式(9)中的第一项即电流测量误差Δid、Δiq的高通滤波项为
(10)

同理,可将式(8)和式(9)中电流测量误差Δid、Δiq的带通滤波项为

将式(10)和式(11)代入式(8)和式(9),可得d、q轴定子电流测量误差Δidm、Δiqm分别为
(12)
式(12)经Park反变换可得到α-β静止坐标系中的定子电流测量误差Δiαm、Δiβm分别为
(13)
由式(13)可见,在电机的整个工作范围内,α-β静止坐标系中的定子电流误差Δiαm、Δiβm均与实际测量误差ΔI成正比例关系。因此,调节补偿器的输入信号使Δiαm、Δiβm降为零,即可消除电机定子绕组相电流的测量误差。
根据以上分析设计SPMSM电流测量误差补偿器如图3所示。

图3 SPMSM电流测量误差补偿器框图

3 仿真验证
3.1 误差补偿效果验证


图4 SPMSM系统仿真波形

3.2 外环干扰抑制验证


图5 抗外环干扰仿真波形
4 结 语
本文分析了采用矢量控制的SPMSM系统的电流测量误差的构成及各分量间的关系,进而提出一种电流测量误差补偿策略。在两相静止α-β坐标系中从实测电流中减去低通滤波的电流指令,从而提取出电流测量误差分量,通过反馈控制有效避免了电流测量误差引起的电机转速和转矩的脉动。同时,该电流测量误差补偿策略通过简单的减法,有效地消除了外环控制器的干扰,提高了电流测量误差补偿器的动态控制能力。仿真实验证明了电流测量误差补偿策略的有效性和良好的动态性能。本文提出的PMSM电流测量误差补偿策略不需要任何机械参数,对系统的电气参数变化较不敏感,结构简单,易于实现。
猜你喜欢
陕西画报(2022年9期)2022-11-01
防爆电机(2022年4期)2022-08-17
红领巾·萌芽(2022年3期)2022-03-13
园林科技(2021年2期)2022-01-19
防爆电机(2021年6期)2022-01-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
筑路机械与施工机械化(2018年1期)2018-03-06
物联网技术(2016年12期)2017-01-21
科技视界(2016年26期)2016-12-17