
基于列车控制与管理系统的车辆制动力管理方案设计
2019-03-27 09:12王华伟刘国梁
城市轨道交通研究 2019年2期
王华伟 刘国梁
(中车长春轨道客车股份有限公司工程研究中心, 130062, 长春//工程师)
早期的城市轨道交通车辆中,列车控制与管理系统(train control and management system,TCMS)的硬件可靠性低,整个系统与各子系统功能关联度也比较低。近年来,随着我国各大中型城市轨道交通的快速发展,TCMS技术也在迅速发展,无论是硬件研发还是列车控制软件复杂程度都得到了质的飞跃,TCMS参与整车控制的功能越来越多。
在传统列车制动力管理策略中,通常由制动系统进行整列车制动力需求的计算和分配。制动系统控制的管理方式是平均分配各车电制动力,无法最大限度地发挥电制动能力的要求,并存在坡道启动过程冲动过大、频繁补充空气制动等问题。
本文基于深圳地铁某A型车项目,从TCMS与制动系统接口、列车制动力的分配原则、制动指令的处理及制动过程不同阶段的处理方案等方面,介绍一种全新的基于TCMS的城市轨道车辆制动力管理方案。
1 方案设计
1.1 网络系统与制动系统接口
列车为6辆编组,两个端车为拖车,中间4个车辆为动车。TCMS通过多功能车辆总线(MVB)与制动控制器网关阀进行通信(见图1)。制动系统内部通过控制器局域网(CAN)总线进行通信。为保证信息的实时性,网络系统及制动系统之间的控制及状态信息的MVB端口轮询周期设定为64 ms,故障信息端口轮询周期设定为256 ms。
1.2 电空混合制动原则
列车制动方式包括电制动和空气制动,其中电制动由牵引系统施加,空气制动由制动系统施加。实施原则是电制动优先,空气制动作为制动力不足时的补充,电制动与空气制动实时协调配合。当电制动不足时,优先在拖车和电制动故障的动车上补充空气制动,达到最大黏着后,再在电制动正常的动车平均补充空气制动。当车辆速度低于某一限定值时,电制动逐步由空气制动替代。为了减少对制动闸瓦的磨耗,同时又保证制动需求,电、空制动转换时的列车速度要求尽量低,冲动率不大于0.75 m/s2。

图1 TCMS与制动系统接口框图
1.3 电空混合制动交互信息
制动系统每3辆车为一个单元编组,每个单元编组设有2个网关阀,网关阀通过TCMS与牵引控制单元(DCU)之间进行信息交互。相互间传输信号如图2所示。TCMS、DCU及制动系统间信号流说明如表1所示。
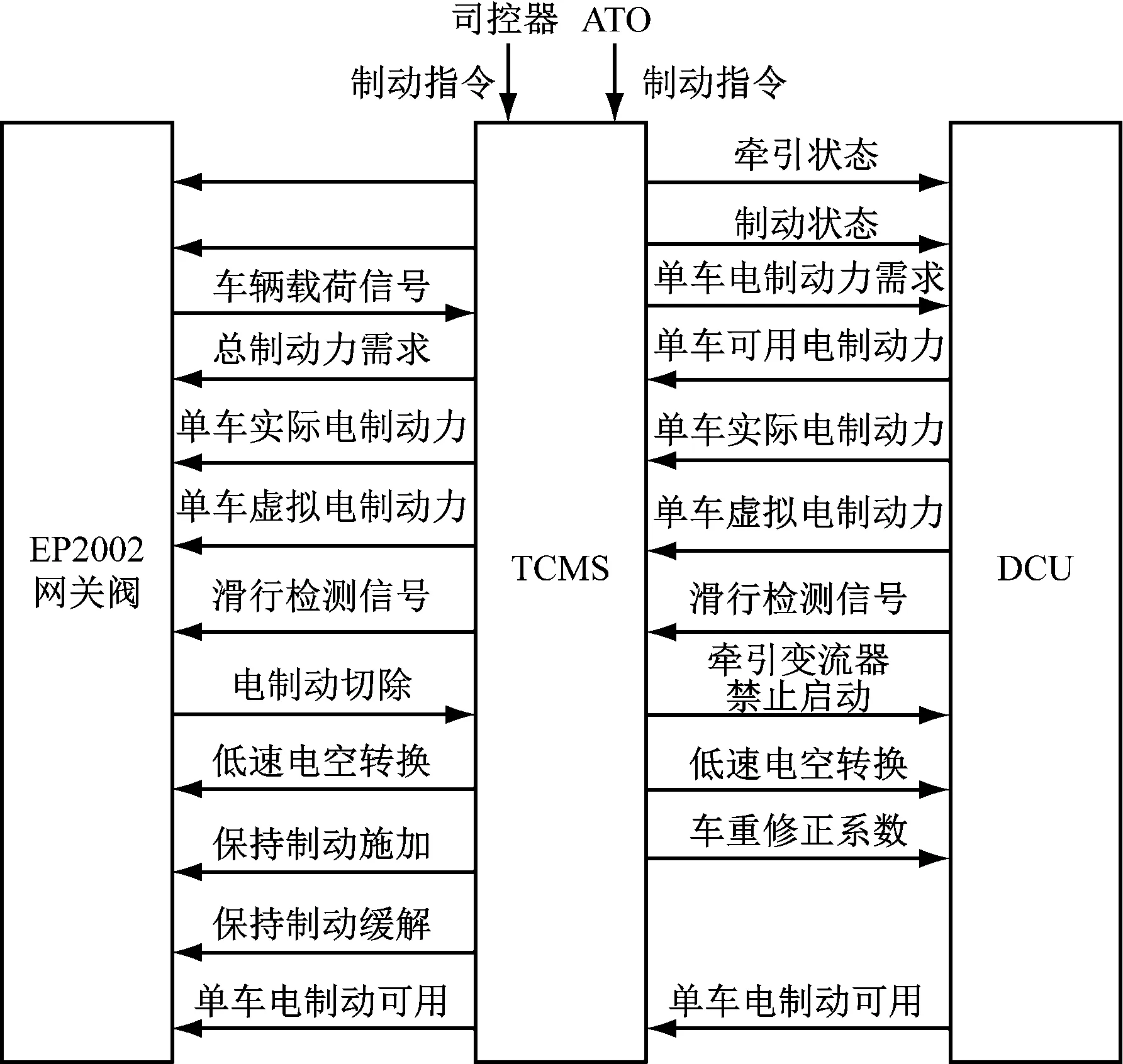
图2 TCMS、牵引系统和制动系统信号流框图
1.4 制动指令的发出
TCMS根据司控器或列车自动驾驶(ATO)系统给出的制动指令,获取最大等效减速度百分比,结合从制动系统获得的各车包含转动惯量的车重信息进行总制动力的计算,并把计算值发送给制动系统。最大常用制动等效减速度初定值一般为技术条件中规定的最大常用制动值(1.12 m/s2),该值在列车型式试验过程中需根据列车的实际制动特性进行调整。
1.5 电制动力分配
TCMS根据制动指令和各车牵引变流器的可用电制动力信号,把计算得到的列车所需总制动力分配给4个牵引变流器。牵引系统结合冲动率限制(≤0.75 m/s3)、车重修正系数(由TCMS得到)及可用电制动力大小等条件施加电制动。

表1 TCMS、DUC及制动系统信号流说明
TCMS发出制动状态和制动指令值给牵引系统后,牵引系统发送单车虚拟电制动力给TCMS,TCMS转发此信号给制动系统。为防止在电制动建立阶段补充空气制动,制动系统在接收到制动状态后的一段时间内按照此值计算需要施加的空气制动力。该段时间过后,制动系统根据TCMS发送的各动车实际施加的电制动力情况来施加空气制动。牵引系统电制动力上升到最大值的时间一般在1.5~2.0 s之间,初始值定为1.5 s。
1.6 空气制动分配
制动系统负责空气制动力的分配,空气制动力的分配原则为:当电制动力不足时优先在拖车(若此时有动车电制动不可用,则以拖车处理)补充空气制动;若拖车补充的空气制动力达到拖车最大黏着后整车施加的总制动力还未满足整车制动需求,则制动系统在各动车平均补充空气制动,制动系统保证在此过程中单车不超出最大黏着限制。
牵引系统和制动系统将在整车调试阶段对电制动和空气制动的施加及缓解的速率进行调整,以满足整车冲动限制。
1.7 电制动滑行处理
当动车在施加电制动过程中出现滑行时,牵引系统进行防滑控制并发送电制动滑行信号给TCMS,TCMS发送滑行信号给制动系统。在牵引系统防滑控制过程中,为防止空气制动补偿电制动损失值,制动系统在一定时间内锁存发生电制动滑行前的实际电制动力。若该动车电制动滑行程度达到制动系统规定的深度滑行或者超过允许的滑行时间,则制动系统向TCMS发送电制动切除指令,TCMS向该动车牵引系统发送电制动切除信号(牵引变流器禁止启动信号),牵引系统切除该动车电制动。若在电制动滑行过程中制动系统发出电制动切除信号,则在本次制动过程中,制动系统禁止已切除电制动的牵引变流器再次施加电制动。当列车静止或者列车进入惰行或者牵引状态且速度大于20 km/h时,制动系统撤销电制动切除信号。
1.8 停车制动
停车制动分为4个阶段:低速电空转换;纯空气制动的停车制动;保持制动施加;保持制动缓解。
1.8.1 低速电空转换
列车制动时,在车速降到某个速度点时,开始低速电空混合制动,TCMS向制动系统和牵引系统发出电制动退出信号(电平信号),电制动衰减,空气制动开始上升。为防止电制动和空气制动在转换过程中发生冲动,电制动衰减的斜率和空气制动上升的斜率应基本一致,通常该斜率折合为加速度的变化率。根据以往项目经验,制动系统和牵引系统在电空转换阶段的制动力变化斜率折合为加速度的变化率值为1 m/s3。
一旦进入低速电空混合制动阶段,制动级位的改变不影响电制动按照规定的斜率退出;低速电空混合制动过程中,TCMS发给制动系统的制动力需求为司控器或ATO指令的实际需求值,制动系统根据制动力需求施加空气制动。
若在低速电空转换阶段司控器由制动位回到惰行位,牵引系统退出电制动状态,制动系统缓解空气制动;若在低速电空转换阶段司控器由制动位回到牵引位,牵引系统退出电制动并根据牵引手柄级位施加牵引力,制动系统缓解空气制动。列车速度在电空转换速度点及以下时,若司控器由牵引或者惰行位改变到制动位,不施加电制动,制动完全由空气制动实施。
1.8.2 纯空气制动的停车制动
当低速电空转换完成时,电制动完全退出,空气制动完全取代电制动。空气制动力的值取决于司控器或ATO给出的制动指令。制动系统在此过程中负责控制整车冲动限制。
1.8.3 保持制动的施加
在人工驾驶模式及网络故障和备用模式下,无牵引指令并且当列车进入静止状态时,保持制动的施加由制动系统自动完成;在ATO模式下,保持制动的施加指令由TCMS发给制动系统来完成;在ATO模式下,若列车已经进入静止状态,如3 s内TCMS未发出保持制动施加指令,则制动系统自动施加指令以保持制动。保持制动施加的逻辑如图3所示。制动系统施加的保持制动力,取最大常用制动力(经载荷修正)的70%和当前整车制动力需求的最大值。
1.8.4 保持制动的缓解
在人工驾驶模式和ATO模式下,当满足以下两种情况中的任何一种时,TCMS向制动系统发出保持制动缓解指令:
(1) 当有牵引指令,并且整车实际施加的牵引力大于不同载荷下规定的保持制动缓解的牵引力时,缓解保持制动的牵引力从空载(AW0)到超载(AW3)工况线性增加。
(2) 当有牵引指令,并且列车速度大于1 km/h时,为防止在人工驾驶模式和ATO模式下TCMS未及时发出保持制动缓解指令,制动系统在检测到有牵引指令且列车速度大于1.5 km/h时,自动缓解保持制动。在TCMS与制动系统间通信故障模式和备用模式下,当制动系统检测到有牵引指令时,制动系统自动缓解保持制动。保持制动缓解的逻辑如图4所示。
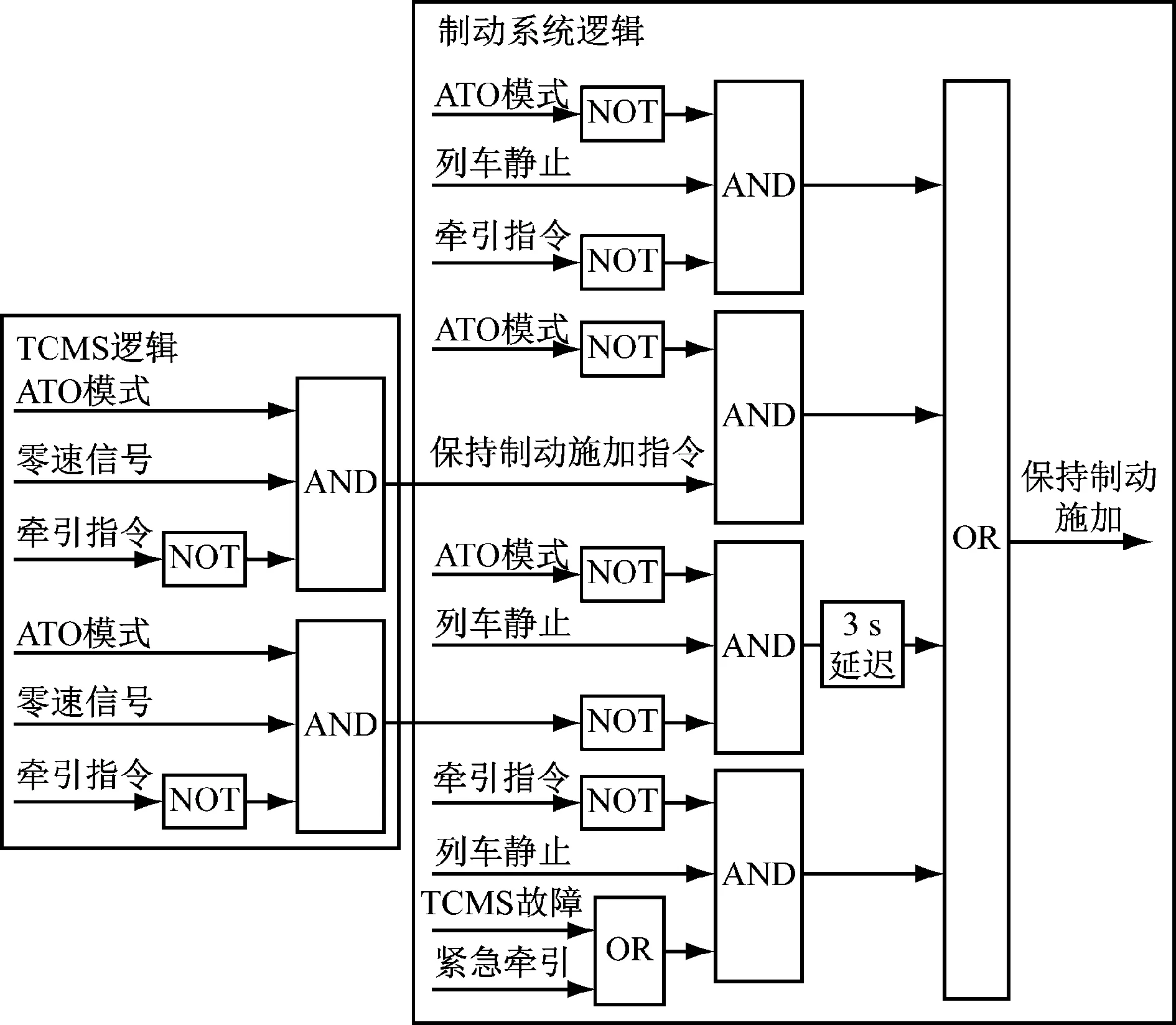
图3 保持制动施加的逻辑框图
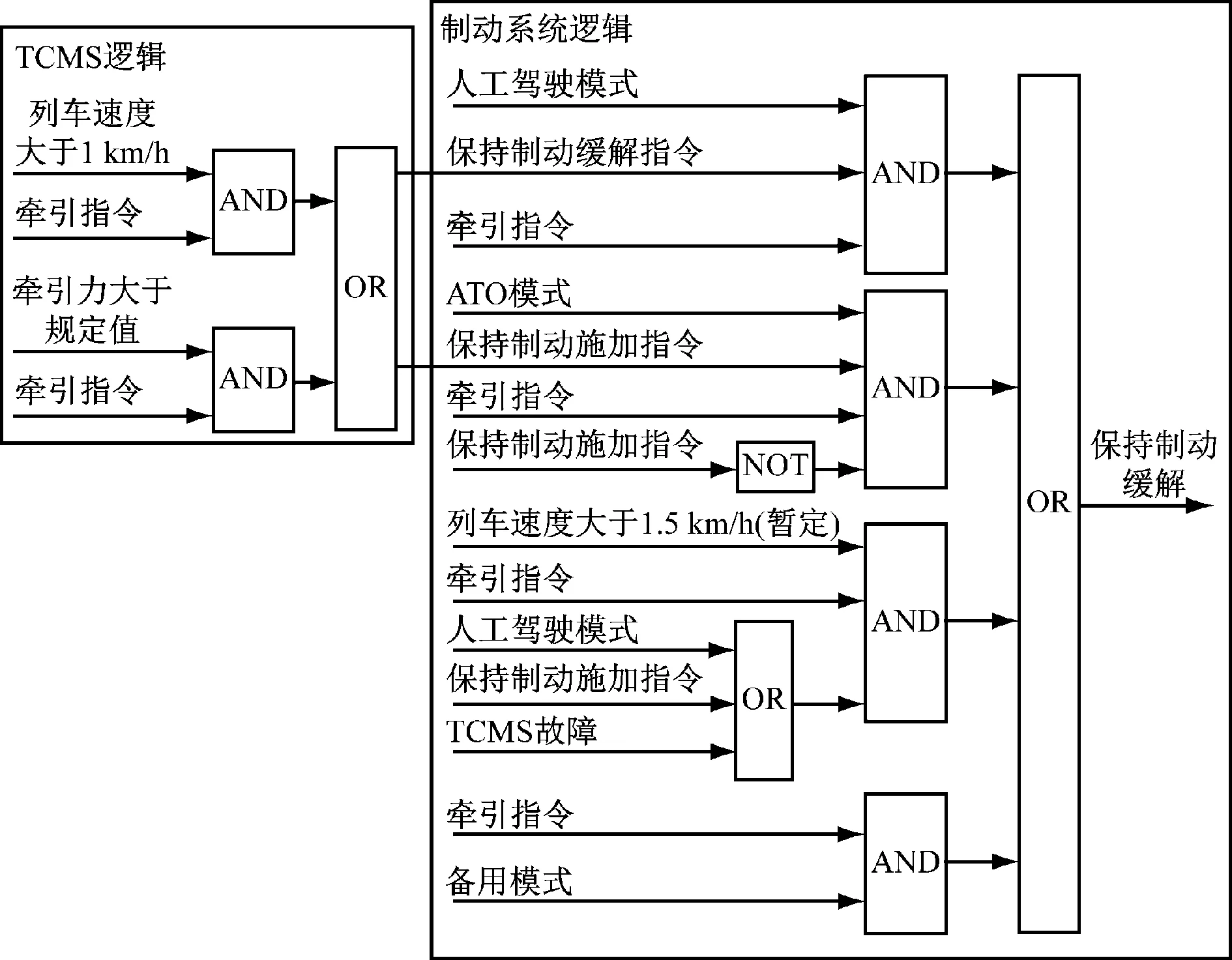
图4 保持制动缓解的逻辑框图
1.9 快速制动
当TCMS检测到快速制动硬线指令后,对制动力按正常的常用制动模式进行管理,平均减速度为1.3 m/s2。网络系统用于计算总制动力的等效减速度在整车调试阶段确定。
快速制动指令优先。从安全制动优先的角度出发,只要快速制动硬线指令激活,不管当前来自网络或者硬线的牵引和制动指令是否激活,制动系统均按快速制动处理。
在TCMS与制动系统间通信正常时,当快速制动硬线指令激活,TCMS和制动系统各自计算整车制动力需求:TCMS根据其计算的整车制动力需求,分配电制动力;制动系统根据其计算的整车制动力需求和TCMS经MVB总线发送的电制动力值,计算并施加空气制动力。在TCMS与制动系统间通信故障或备用模式下,当制动系统检测到快速制动硬线指令被激活,将自行计算整车制动力需求并施加纯空气制动力。
2 试验验证
为验证本管理方案,制动系统除常规的制动试验项点外,需增加相关验证计算和参数调试确定。制动系统本身参数调试不是本文讨论重点,以下仅介绍TCMS与制动系统间的相关接口参数调试。
2.1 发送给制动系统的总制动力需求调试
在整车调试时发现:① 在主控手柄由最大牵引迅速转换到最大制动时,或者在制动级位由小级位快速变换为大级位时,若TCMS直接发送制动级位,则制动系统在电制动建立的过程中会立刻补充空气制动(见图5)。这是由于制动系统只在2 s内检测到手柄由牵引位或惰行位转换到制动位时,即使用虚拟电制动力值;若手柄由最大牵引位快速转换到最大制动位时,牵引系统由最大牵引状态到施加最大电制动力需要3 s左右的时间,故制动系统会在2 s后补充空气制动。② 制动级位由小级位快速转换到大级位时,在电制动建立的过程中,制动系统会立刻补充空气制动。

图5 制动指令按手柄实际制动级位发出的界面
为避免上述两种情况发生,TCMS软件最终调整为在100 ms 的TCMS软件运行周期内,牵引/制动参考值增加6.67%(快速制动时制动指令直接按照最大值计算),参考值的变化范围为-100%~100%。经此修改后,可避免上述两种情况下空气制动会自动补充的发生(见图6)。
2.2 最大常用制动等效减速值调试
TCMS根据加速度公式计算列车总制动力。在列车型式试验时,需以列车最大常用制动的减速度(1.12 m/s2)为目标调整计算公式中的加速度值a。最终调试后确定a=1.14 m/s2。

图6 制动指令以一定斜率发出的界面
2.3 空气制动延时施加时间参数调试
在调试过程中,需调整电制动施加初期制动系统禁止施加空气制动的时间,该时间参数初始值为1.5 s。该时间参数确定方法为:最大载荷情况下,列车施加最大常用制动,牵引系统观测电制动力上升到最大值的时间,即确定为最终的参数。通过试验,本方案此时间参数设定为2 s。
2.4 制动系统发送的电制动切除时间参数调试
当出现电制动滑行后,制动系统切除电制动信号的处理直接影响到制动性能。若牵引系统调整滑行时间过长,则制动距离增加,列车可能会冒进或者发生停车对标不准。更为严重的是,若发生严重的电制动滑行,而制动系统未及时切除电制动,可能会造成轮对擦伤的严重故障。
电制动切除时间参数确定在滑行试验过程中进行,该时间参数会由于列车采用不同供应商的制动系统和牵引系统而发生变化,但确定该参数的原则只有一个,即保证制动距离并且最大程度防止轮对的擦伤。经过调试,本方案确定:当发生严重滑行时,制动系统立即切除电制动;如果电制动滑行未达到制动系统规定的滑行深度5 s后,制动系统切除电制动。
2.5 低速电空制动转换速度点调试
低速电空制动转换速度点的确定对于制动闸瓦的磨耗及乘客舒适度有着相当大的影响:若设定的速度点过高,则电制动过早退出,空气制动过早施加,制动闸瓦使用率增大,导致闸瓦损耗增加;若电空制动转换速度点过低,则在低速段,由于牵引系统的电制动控制不精确,电制动的退出斜率不能稳定在规定值,导致列车冲动过大,影响旅客舒适度。根据以往项目经验,电空转换点选择在6~8 km/h之间。本方案最终确定低速电空制动转换速度点为8 km/h。
2.6 低速电空转换电制动退出信号时间参数调试
由于电制动施加的速率快于空气制动的速率,为保证两种制动变化的一致性,在低速电空转换时,电制动一般应延后于空气制动动作。经现车调试,本方案TCMS在向制动系统发送电制动退出信号后,延时200 ms向牵引系统发出电制动退出信号。
2.7 缓解保持制动牵引力参数调试
网络系统缓解保持制动的条件之一为整车实际施加的牵引力大于规定值,该值的确定主要考虑以下两方面问题:① 保证列车的启动舒适性;② 防止起车阶段,列车倒溜。若缓解保持制动的牵引力设置偏大,则起车时司机需给出较大的牵引级位,列车冲动较大;若缓解保持制动的牵引力设置偏小,则在坡道较大的线路起车时,由于牵引力小于列车的下滑力,容易引起向后溜车的安全事故。经现车调试,本方案缓解保持制动的牵引力根据整车不同载荷,确定为从AW0到AW3载荷按照115 kN到180 kN线性增加。
3 结语
本文介绍了一种新的城市轨道交通车辆制动力管理策略。该策略优点主要有:① 充分利用电制动力,减少空气制动闸瓦损耗,既节约了能源,又降低了维修成本;② 减小电制动和空气制动转换过程中的冲动率,增强乘客舒适度;③ 加强TCMS对列车的控制能力,加强TCMS、制动系统及牵引系统在列车制动过程中的协同性。该制动力管理方案已应用于多个城市轨道交通线路的车辆系统中,运用效果良好,取得了较好的社会效益和经济效益。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
学校教育研究(2020年11期)2020-06-08
电子制作(2018年12期)2018-08-01
制造技术与机床(2017年6期)2018-01-19
中国核电(2017年1期)2017-05-17
电子制作(2017年19期)2017-02-02
科技传播(2015年20期)2015-03-25
噪声与振动控制(2015年4期)2015-01-01
西安航空学院学报(2014年5期)2014-07-13
客车技术与研究(2014年1期)2014-03-20
