人造肌肉驱动每秒四百五十次“抖腿”
2019-04-01 15:15张静
海外星云 2019年23期
张静
拍不死的机器人小强
打不死的小强,生存能力太强!
如果微型机器人能获得蟑螂的生存能力,哪怕是一部分,就可能在一些苛刻的环境下,执行特定任务。而这样的一群机器小强,能干什么事情就值得想象了。
华人科学家冀晓斌、刘昕畅,以及来自洛桑联邦理工学院(EPFL)的软传感器实验室(LMTS)和综合执行器实验室(LAI)、法国塞尔吉- 蓬图瓦兹大学的聚合物和界面物理嵌合实验室(LPPI)的几位科学家,共同设计出这样一款柔软的昆虫机器人,该机器人被苍蝇拍或者鞋子拍打之后,依然可以继续移动。
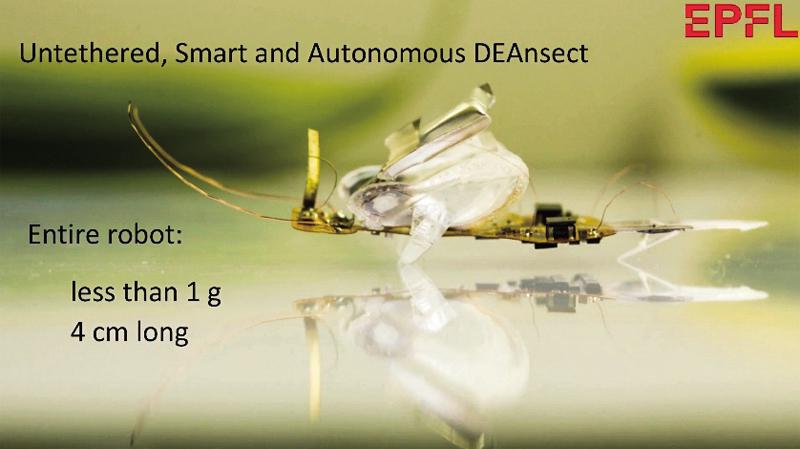
该团队把该软件机器人称为DEAnsect,它有两个版本,一版需要通过电线连接电源,速度每秒30毫米。另一版是无线连接、可以根据环境自主导航的,速度为每秒12毫米
DEAnsect 长40毫米,裸重为0.97克,而一枚一角硬币的重量为1.15克。无线版可以携带0.78克的灵活电子组件,比如传感器、控制器和电池等。该机器人可以自动遵循“8”字形路径移动。
无线版装备了板载微控制器和两个光电二极管,用来控制“大脑和眼睛”,使“小强”能辨识黑白图案,从而能根据地面上绘制的线条移动。如上图所示,“小强”可以自动遵循“8”字形路径移动,到达“8”字末端时,也就是当两个光电二极管都在白色表面时,机器人停止运行。
冀晓斌表示,之后将做一个DEAnsect族群来模拟昆虫族群的集体智能表现,从而执行多功能化的任务,比如灾难救援,还有与自然界昆虫聚居来研究它们。
低电压驱动“人造肌肉”
DEAnsect配备了介电弹性体致动器(DEAs),是一种细如毛发的人造肌肉,可以通过振动使其前行。DEAs就是昆虫机器人能够轻便快速移动的主要原因,当然,它也允许机器人在各种路面和地形上移动。
创造人造肌肉一直是科学和工程学的重大挑战,在材料方面,形状记忆金属(SMA)、气动制动器和电活性聚合物(EAP)都是不错的选择。在EAP领域,最主要的研究方向就是介电弹性体(DEs),该材料应变大、断裂韧性和功率重量比与天然肌肉相近,所以灵活、通用且高效的DEAs就成了制作新一代机器人的最优选择。
DEAnsect由3个LVSDEA (低压堆叠式DEA)驱动,每个LVSDEA都连接一条腿,这些装有人造肌肉的“昆虫腿”通过快速打开和关闭电压来运动,每秒开关电压达到450次。腿与地面大概呈45度,利用方向摩擦力向前移动。
机器人利用独立的腿部驱动力进行自动转向。当三条腿都在活动状态时,机器人向前移动,当前腿和左腿处于活动状态时,右腿作为轴点,机器人向右转。同理可以向左转和向后转。
该团队使用纳米制造技术,通过降低弹性体膜的厚度,开发出只有几个分子厚的柔软、高导电性的电极,使人造肌肉能够在相对较低的电压下工作。这种巧妙的设计使研究人员可以大大减小电源的尺寸。
EPFL软换能器实验室主任赫伯特·谢拉评价说:“DEA通常在几千伏的电压下工作,这需要一个大型的电源装置。”“我们的设计使仅重0.2克的机器人就可以背负一切所需的东西。”
赫伯特·谢拉补充道:“这项技术为DEA在机器人技术中的广泛应用、智能机器人昆虫群巡检、远程维修提供了新的可能性,甚至可以通过派遣机器人到昆虫群落中生活来加深对昆虫群落的了解。”

A 为裸重机器人图;B 为该机器人可以自动导航“8”字路径并在末端停止;C 为组装之后的DEAnsect 顶视图;D 为DEAnsect 侧视图;E 为变形的DEAnsect 侧视图,胶带将机器人的身体固定在弯曲的状态下。DEAnsect 在正常和变形的状态下均可移动
专访冀晓斌
问:你是如何想到要做这个机器人的?灵感来源是什么?是蟑螂吗?
冀晓斌:我做这个机器人的灵感是爬行类昆虫。当然蟑螂也是启发源泉之一。昆虫体重很轻,但是却可以非常灵敏,而且柔性的身体可以赋予他们顽强的生命力。尤其是昆虫族群体现的集体智能赋予它们更强的集体生存能力。
问:DEAnsect的突出特征是被苍蝇拍拍打之后依然可以运动,并且可以自主导航,这是如何实现的,难点是什么?
冀晓斌:DEAnsect之所以能够幸免于拍打而继续运转,是因为它是软体人造肌肉驱动的。我们使用的人造肌肉是一层只有20微米厚的弹性体硅胶薄膜,柔软的本质使得这类驱动器可以在被扭曲、挤压等发生变形的条件下继续工作。所以,DEAnsect即使被拍打,驱动系统依然可以工作,这是为什么它能继续行进的原因。
关于自主巡航,我们在软体机器昆虫上集成了整个机器人系统,包括微控制器当做大脑进行逻辑决断,光二极管当做双眼来识别路线,还有电池来供能。难点在于,昆虫大小的自主软体机器人从来没有发表过。因为软体驱动器的功率一般很低,尤其是在昆虫级别,让软体昆虫机器人负载整个机器人系统,包括传感器、控制器、驱动器、供能系统等等,是非常具有挑战性的。
介电型弹性体致动器(DEA)是一类人造肌肉,具有高输出功率,但是一般需要几千伏来驱动。几千伏电压的电子配件的大小和重量,限制了DEA机器人的小型化与整体性能。我们的工作降低了DEA驱动电压的一个数量级,从而使我们可以使用超轻质量(小于一克)的控制与供能系统。
问:DEAs能在低电压下工作是一个突破,这个机器人需要的电压是多少,目前的续航能力如何?
冀晓斌:自主DEAnsect被设计的工作电压是450伏特。我们可以用相同的纳米制造工艺制造更低电压运转的DEAs(100V)。目前,在电池充满一次电的情况下,可以连续工作大约14分钟,没电以后可以再次充电,然后继续工作。
问:Herbert Shea说这项技术为智能机器人昆虫群巡检提供了可能性,但是机器人不会飞的话是不是会影响性能和应用场景?相比于哈佛大学RoboBee的RoboFly,DEAnsect有哪些优劣势?
冀晓斌:根据不同的应用环境,巡检机器人可以被设计为在空中飞行,陆地爬行,还有水下游泳。陆地上的巡检不一定非要飞行机器人,比如之前波士顿动力的Spot mini,就是四足陆地机器人,用于建筑工地的巡检任务。
我很喜欢哈佛大学的Robobee还有Robofly,可是他们大多数都是有线连接的,无线版本的Robobee也被发表,但是整个飞行时间只有几秒,而且需要强光光源为集成的太阳能电池供电才能实现无线飞行。供能设备的集成一直是小型轻量化机器人的瓶颈。
DEAnsect的最大优势是完全独立自主,不需要外部供能设备,因为可充电锂电池已经集成在机器人上。其次的优势是DEAnsect 是由软体人造肌肉驱動,赋予它顽强的生命力。
劣势是DEAnsect目前为手工组装,所以制造一个族群需要耗费大量精力,而且手工组装精度也受限制。所以DEAnsect的自动化制造过程需要被研发。
问:您和同事之后的研究方向是什么?
冀晓斌:我们将来的长期目标是做一个DEAnsect族群来模拟昆虫族群的集体智能表现。从而执行多功能化的任务,比如灾难救援,还有与自然界昆虫聚居来研究它们。
猜你喜欢
古代文明(2022年2期)2022-05-31
少儿科学周刊·儿童版(2021年20期)2021-12-11
学苑创造·C版(2019年11期)2019-12-05
青年生活(2019年27期)2019-10-21
知识就是力量(2018年9期)2018-09-06
作文大王·中高年级(2018年7期)2018-08-18
人生与伴侣·共同关注(2018年3期)2018-03-23
科技风(2017年8期)2017-10-21
作文大王·低年级(2017年9期)2017-09-18
知识就是力量(2017年1期)2017-01-06