
基于驾驶员特性的主动避撞分级制动策略与验证∗
2019-04-11 05:57胡远志杨喜存
汽车工程 2019年3期
胡远志,杨喜存,刘 西,黄 玲
(1.汽车噪声振动和安全技术国家重点实验室,重庆 400054;
2.重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆 400054; 3.上汽依维柯红岩商用车有限公司,重庆 401122)
前言
汽车主动避撞CW/CA(collision warning/avoidance)作为一项先进的主动安全技术,在提高交通安全性方面具有重要意义。当避撞系统检测到本车与前方的障碍物之间存在潜在的碰撞危险时,系统通过声音和图像等方式向驾驶员发出警告,提醒驾驶员采取措施避撞;如果驾驶员没有做出及时有效的避撞操作,碰撞危险变得十分紧急时,避撞系统会自动介入,接管对车辆的控制,通过主动制动来避免碰撞事故。
随着智能交通系统在全球的兴起,针对汽车主动避撞系统的研究获得了广泛关注。尤其是在美国高速公路交通安全署NHTSA(national highway traffic safety administration)的推动下,汽车主动避撞系统开始取得了迅速发展,许多避撞模型被提出。目前国外对汽车主动避撞系统的研究较多。较有代表性的有 NHTSA模型、Berkeley模型和 MAZDA模型[1-2]。韩国汉阳大学的Lee D.H.等人在研究了期望减速度和液压制动系统特性的基础上,提出了预测停车距离模型,其在城市避撞系统的研究中有很大的应用价值[3];文献[4]中把斜坡路况考虑在内,提出了在斜坡路况下确定制动施加时间的方法,优化了主动避撞系统在斜坡路况下的制动性能;文献[5]中为解决近距离稳定跟车工况中前车突然制动,本车将会有发生追尾碰撞危险的问题,引入了THW(time-headway)的概念即两车相对距离除以本车速度,可准确识别此种危险工况;文献[6]中采用单目摄像头识别车辆和车道线的方案,用于开发主动避撞系统,且识别到的车辆宽度、位置和速度等信息通过卡尔曼滤波的方式进行处理,同时,为增加系统的鲁棒性,对检测到的车道线信息和单目摄像头模型进行数据融合,得到的TTC(碰撞时间)估计结果较好,提高了避撞系统的性能;文献[7]中结合滑动轮胎模型估算出路面摩擦力峰值,然后根据摩擦力峰值再估算出TTC对应的制动力阈值,使避撞系统对不同路面的适应性更好;文献[8]中基于阻抗控制设计了本车与前车和本车与后车的3车驾驶场景的主动避撞系统,且本车采用PI控制器跟踪阻抗控制产生的参考输入,能有效减轻3车场景中的碰撞;文献[9]中在普通基于车与车之间避撞系统的基础上,增加了行人避撞的功能,当本车车速低于35 km/h时,可实现本车与前方车辆或行人的完全避撞;文献[10]中通过驾驶模拟器采集行人在道路中的行走数据,开发了用于行人避撞系统的驾驶员意图检测算法;文献[11]中介绍了由日本丰田汽车公司提出的行人主动避撞系统的测试方法,进一步推动了行人主动避撞系统的发展;文献[12]中对主动避撞系统的技术要求、成本和安全收益做了详细分析;文献[13]中对国际上已经推出的主动避撞系统的机构和具体的测试方法做了详细介绍。
我国针对汽车主动避撞系统的研究也有一些成果。清华大学侯德藻等人对主动避撞系统的研究取得了很大的突破,建立了反映驾驶员驾驶特点的新型安全距离模型[14];北京理工大学的裴晓飞、刘存星等人采用避撞时间余量来判断当前工况的危险程度,利用较优变道轨迹模型进行变道操作判断,设计了符合驾驶员避撞特性的主动避撞系统,建立了车辆紧急变道避撞安全距离模型[15-17];同济大学的李霖、冯弟瑶等人根据真实交通危险工况中驾驶员的制动反应时间和真实追尾事故,分别构建了危险估计模型并进行事故重建,设计了融合制动控制和转向控制的避撞系统,并提出了系统关键参数的优化方法[18-22]。
目前研究的汽车主动避撞系统,大多数采用安全距离模型,即通过各种传感器获得车间相对运动信息,当实际车距小于模型计算的预警安全距离或制动安全距离时,主动避撞系统的声光预警和制动干预则会相继介入;另外,也有一部分模型是利用车间相对距离、相对速度和相对加速度建立的安全时距模型。但就驾驶员对主动避撞系统的接受程度而言,现有避撞系统的预警/制动策略仍有较大的改进空间:一是要更为准确地表征当前工况的危险程度;二是要制定符合驾驶员特性的避撞预警/制动策略。
本文中首先提出了一种新的危险判定指标TTC的建模方法,它充分利用已知车间相对运动信息,来准确有效地评估当前工况的碰撞危险程度。然后基于TTC和本车车速设计了主动避撞系统的分级制动策略,并对制动时机和期望减速度进行了实车标定;引入了预警门限值Tw,以TTC为判断条件设计了主动避撞系统的防撞预警策略,并采用声光预警的方式帮助驾驶员实现有效避撞。最后通过实车试验,验证了系统功能的有效性和实用性。
1 危险判定指标
对于主动避撞系统的研究,有些采用安全距离模型中的安全距离来评估当前工况的危险程度[14];有些采用Berkeley模型中的危险系数来评估当前工况的危险程度[1]。安全距离和危险系数本质上只是一种基于距离的线性指标,未必能准确地对碰撞威胁做出实时评估。如果采用一种基于时间的危险判定指标,能直观反映出当前工况下的安全时间余量,就更加接近与驾驶员自然的感知和判断习惯。同时,该指标还应能充分利用获得的本车及前车的行车状态信息。判定当前工况危险程度的一种常用方法是使用TTC,即碰撞时间,一部分TTC建模方法只引入了前车与本车的相对距离和相对速度两个行车状态信息,建立的安全时距模型不够准确[4],另一部分TTC的建模方法虽引入了前车与本车的相对加速度,但也同时引入了本车的速度和减速度,且对工况的分类过于繁琐,影响安全时距模型的实时性[16]。
汽车主动避撞系统作为智能交通系统的组成部分,开发应体现人—车—路一体化的思想,为体现这一要求和提高系统的使用性能,汽车主动避撞系统应满足以下要求。
(1)安全时距模型建模要准确。由于主动制动会比声光报警带给驾驶员更强烈的主观感受,甚至不适,因此,应避免主动制动的频繁介入,而一旦介入,则希望车辆以合适的减速度进行制动,直至速度与前车速度相同。
(2)安全时距模型使用的行车信息在主动避撞系统条件下应能容易获得,且要充分利用所获得的行车信息,同时建模逻辑要尽量简洁,以保证系统的实时性。本车速度和加速度等行车信息可通过本车的传感器获得,前车的位置、速度和加速度等行车信息可通过本车的雷达传感器获得,所有行车信息的数据均通过CAN总线传输至主动避撞系统的控制器。
(3)安全时距模型应在保证安全性的情况下兼顾道路利用率。主动避撞系统的目的是避免追尾事故,理论上将TTC的阈值设置得越大,制动越提前,碰撞发生前速度的降幅越大,就越能消除碰撞的威胁。但是道路的容量与车辆的行驶速度成正比,而与车辆的相对距离成反比。同时,TTC的阈值如果设置过小,会出现预警和制动太晚的情况,造成驾驶员紧张,甚至发生碰撞。
(4)依据安全时距模型进行行车安全状态的判断结果和控制结果应反映相同条件下驾驶员的实际驾驶特点。
(5)安全时距模型适用的工况能涵盖一般道路交通的大多数工况。
现有的模型不能满足以上要求,下面以上述要求为基础,建立了汽车主动避撞的安全时距模型,提出了一种新的TTC建模方法。
新的TTC计算公式为

式中:Drel为前车与本车之间的相对距离,m;vrel为前车与本车之间的相对速度,m/s;arel为前车与本车之间的相对减速度,m/s2,可通过相对车速vrel的历史信息差分获得,并对其进行必要的卡尔曼滤波处理。
根据运动关系方程[16]:

(1) 当 vrel<0,arel≠0,则由式(2)求得 TTC 为

(2) 当 vrel<0,arel= 0,即前车速度小于本车速度,且两车均保持匀速行驶,则式(2)可简化为

(3) 当 vrel=0,arel<0,则式(2)可简化为
(4) 当 vrel=0,arel>0,得到的 TTC 公式同式(7)。
但因arel>0,故式(7)无实数解,表明两车不会发生碰撞。
(5) 当 vrel=0,arel=0,即两车速度相同,且均保持匀速行驶,则式(2)变为

但因实际的行驶工况中,两车的初始车距不可能为0,故表明此种工况下两车不会发生碰撞。
(6)特别地,当vrel>0,即两车的相对速度大于0,前车的速度大于本车的速度,不存在追尾的威胁,因此主动避撞系统只考虑vrel≤0的情况[16]。
综上所述,TTC可表示为
2 主动避撞制动策略设计
危险判定指标TTC能定量反映出当前工况下驾驶员或主动避撞控制系统进行避撞操作的时间余量,因此可以直接作为主动避撞系统的有效判据,如图1所示。面对同车道前方突然出现的障碍目标,一旦驾驶员未能及时采取正确的避撞操作,主动避撞系统能立即代替驾驶员接管车辆控制权。当TTC小于制动触发时刻 TTC1时,制动压力将被自动施加。

图1 分级预警/制动逻辑
制定主动避撞系统的制动策略时,希望高速时制动策略能以较小的减速度较早介入(高速时,以较大减速度制动,容易使车辆失稳,且使驾驶员紧张、不适),低速时制动策略以较大的减速度较晚介入,同时这也比较符合一般驾驶员发现车道前方出现障碍目标时,先以较小减速度制动,再根据主观判断逐渐增大减速度制动来避免碰撞的驾驶习惯。因此,不能设定单一的TTC阈值,仅以TTC作为制动策略的判定条件,会造成高速制动过晚、低速制动过早的问题[15]。据此,本文中以TTC和车速两个参数共同作为制动策略的判定条件,制定避撞系统的制动策略。
首先按照本车车速vhost把行驶工况分为3种:9 km/h<vhost≤20 km/h,为低速行驶工况;20 km/h<vhost<50 km/h,为中速行驶工况;vhost≥50 km/h,为高速行驶工况。然后,针对3种不同的行驶工况设置了3个对应的TTC阈值。当车速与TTC同时满足一组条件时,系统则会给出对应的特定期望减速度aexp。
文献[11]中研究了6种典型危险工况下驾驶员制动反应时间,平均值分布在1.02~1.36 s之间,因此设定9 km/h<vhost≤20 km/h对应的TTC阈值为1 s,20 km/h<vhost<50 km/h 对应的 TTC 阈值为1.4 s,vhost≥50 km/h 对应的 TTC 阈值为 1.8 s。
而在制动减速度方面,NHTSA通过对83名驾驶员的避撞试验数据分析,统计出驾驶员制动过程中的平均减速度和最大减速度[23],如表1所示。由表1可以看出,绝大多数驾驶员的平均减速度不会超过0.55 g,而避撞过程中的最大减速度几乎是平均减速度的2倍。因此,设定制动策略的3组本车车速、TTC阈值(按照本车车速和TTC由小到大的顺序)对应的期望减速度分别为8,6和4 m/s2,保证驾驶员有充足的时间完成避撞选择(制动/转向),并采取相应的避撞操作。
表1 驾驶员的制动减速度统计分布表[23] g
通过实车试验和标定,最终确定车速、TTC和期望减速度的数据和对应关系如表2所示。

表2 本车车速、TTC和期望减速度对比
主动避撞系统的制动策略如图2所示。
在主动避撞系统启动主动制动功能的任何时刻,当驾驶员踩制动踏板或加速踏板行程大于20%时,系统功能会立即退出,驾驶员都能主导对车辆的操作,以保证驾驶员的控制优先权。
3 主动避撞预警策略设计
主动避撞预警策略的关键是预警时机的选择。如果不能及时发出预警信号,驾驶员可能因为注意力不集中、疲惫等原因没有及时发现危险而发生碰撞事故;如果系统预警过于频繁,不仅无法有效帮助驾驶员避免潜在的碰撞事故,反而会分散驾驶员的注意力,使其过度紧张,成为其精神负担[23]。
图2 主动避撞系统的制动策略流程图
因TTC是一种基于时间的表征量,故比安全距离模型更适合驾驶员直接感知判断的习惯,也有利于结合驾驶员反应时间对预警门限进行调节。为应对不同程度的碰撞威胁,同时尽可能适应大多数驾驶员的避撞特性,引入了一个基于相对车速、驾驶员制动过程中减速度和驾驶员避撞反应时间的预警门限值Tw:

式中:ad为驾驶员制动过程中的平均减速度,m/s2;tres为驾驶员避撞的平均反应时间,s。
根据C-NCAP中FCW(forward collision warning)预警系统的测试评价方法:在FCW发出预警信号1.2 s后,施加一个4 m/s2的制动减速度,直到本车停止或与前车发生碰撞[24]。避撞系统的预警时间,在驾驶员有一定反应时间的情况下,能保证驾驶员接收到信号后有足够的时间采取有效的制动操作而不与前车发生碰撞。因此,预警时间除与驾驶员的反应时间有关外,还要参考车辆制动所需的时间。
预警门限值Tw应满足下式:

式中:驾驶员制动过程中的减速度ad取4 m/s2;驾驶员避撞的反应时间tres取1.2 s。因此,式(10)可简化为

当TTC≤Tw时,主动避撞系统预警,当TTC>Tw时,主动避撞系统不预警。预警系统触发时,会给驾驶员同时发送声光提醒信号,视觉预警信息显示在驾驶主仪表上,声音预警使用蜂鸣器发出。
主动避撞系统的预警策略如图3所示。
4 试验验证
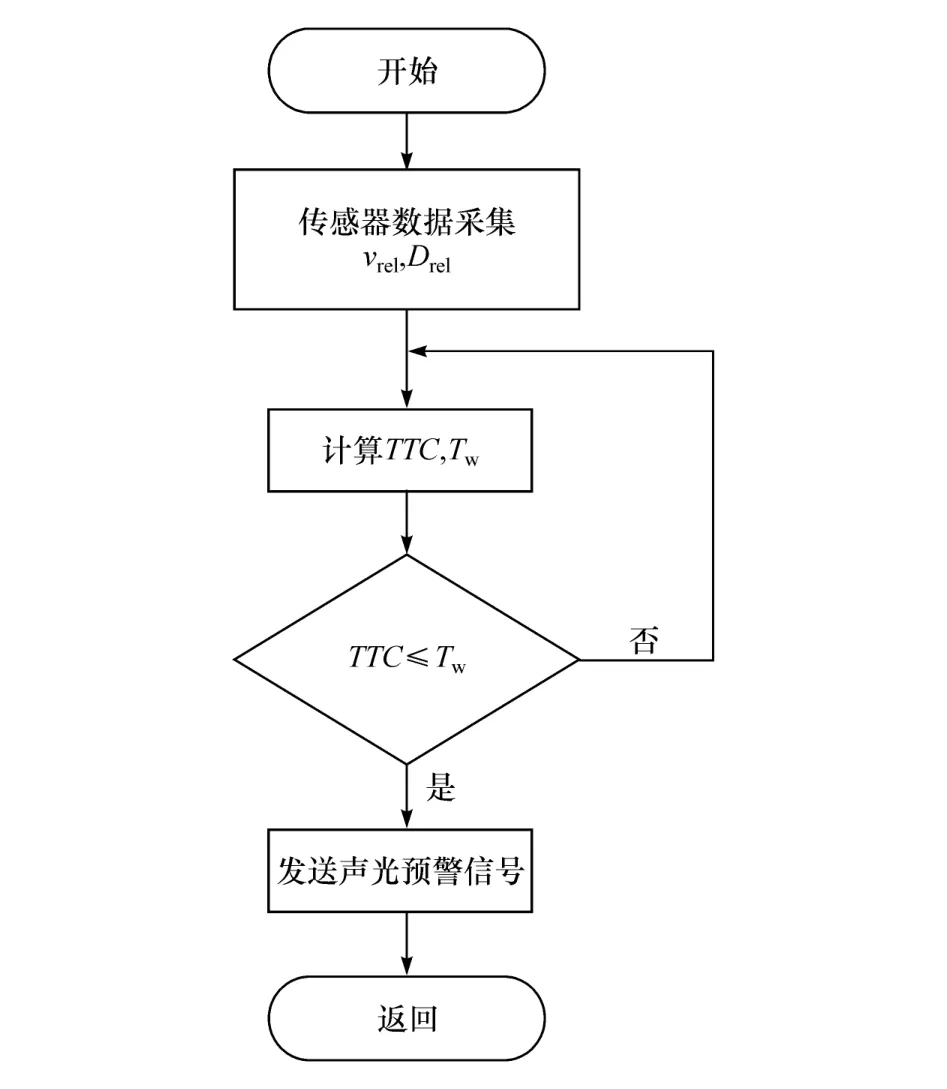
图3 主动避撞系统的预警策略流程图
参照C-NCAP中关于自动紧急制动系统AEB(autonomous emergency braking system)的测试方法,通过实车试验来验证主动避撞系统避撞策略的有效性。主动避撞系统的有效性测试方法主要分为前车静止、前车慢行和前车制动3种工况,如表3所示。表3中vfro为前车速度,afro为前车减速度。
虽然主动避撞系统设计时考虑了一般道路交通的大多数工况,但是考虑到试验的安全性,本阶段的研究工作只对前车静止的CCRs_1与CCRs_3和前车慢行的CCRm_3 3种工况进行试验验证。
4.1 前车静止工况(CCRs_1)
试验结果如图4和图5所示,测试开始时本车以20 km/h匀速行驶,两车相距100 m。15.4 s时,TTC小于防撞预警门限值,主动避撞系统向驾驶员发出提示性预警,但由于本车并未制动,两车仍然以恒定的相对速度靠近,相对距离和TTC值逐渐减小。16.06 s时,TTC为 0.99 s,本车车速为19.24 km/h,满足 9 km/h<vhost≤20 km/h,TTC≤1.0 s的判定条件,处于危险状态Ⅲ,由于驾驶员没有任何避撞动作,系统开始主动制动,施加了约9.07 MPa的制动压力,产生了8 m/s2的减速度,相对速度减小,相对距离和TTC的值仍继续减小,在16.63 s时 TTC达到最小值 0.43 s,相对速度在17.77 s时减小为0,此时相对距离达到最小值2.65 m,成功避撞,危险状态解除。
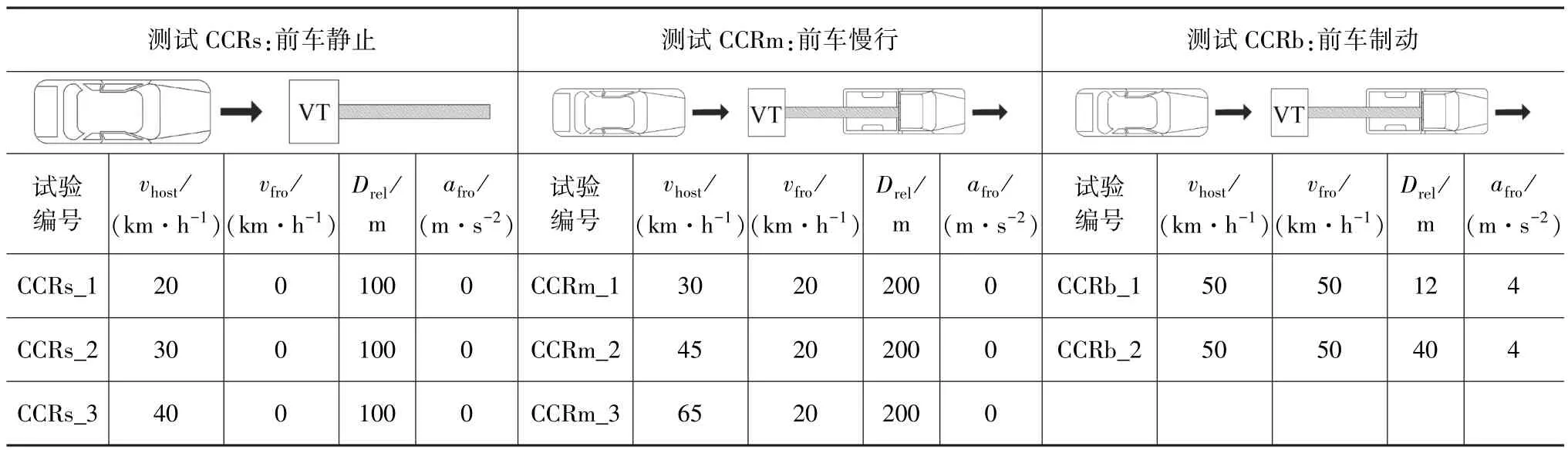
表3 主动避撞系统功能测试项目
4.2 前车静止工况(CCRs_3)
试验结果如图6所示。测试开始时本车以40 km/h匀速行驶,两车相距 100 m。13.7 s时,TTC小于防撞预警门限值,主动避撞系统向驾驶员发出提示性预警,但由于本车并未制动,两车仍然以恒定的相对速度靠近,相对距离和TTC值逐渐减小。16.16 s时,TTC为 1.39 s,本车车速为40.23 km/h,满足 20 km/h<vhost<50 km/h,TTC≤1.4 s的判定条件,处于危险状态Ⅱ,由于驾驶员没有任何避撞动作,系统开始主动制动,施加了7.72 MPa的制动压力,产生了6 m/s2的减速度,相对速度减小,相对距离和TTC值仍继续减小。17.08 s时,TTC为0.88 s,本车车速为19.99 km/h,满足9 km/h<vhost≤20 km/h,TTC≤1 s的判定条件,处于危险状态Ⅲ,此时驾驶员仍然没有任何避撞动作,系统继续主动制动,施加了约9.07 MPa的制动压力,产生了8 m/s2的减速度,TTC继续减小,在17.38 s时达到最小值0.85 s,相对速度在19.15 s时减小为0,此时相对距离达到最小值2.54 m,成功避撞,危险状态解除。
4.3 前车慢行工况(CCRm_3)
图4 前车静止工况(CCRs_1)试验结果

图5 前车静止工况(CCRs_1)试验现场
试验结果如图7所示。测试开始时本车以65 km/h匀速行驶,两车相距200m。12.01s时,TTC小于防撞预警门限值,主动避撞系统向驾驶员发出提示性预警,但由于本车并未制动,两车仍然以恒定的相对速度靠近,相对距离和TTC的值逐渐减小。14.17 s时,TTC 为1.79 s,本车车速为65.18 km/h,满足vhost≥50 km/h,TTC≤1.8 s的判定条件,处于危险状态Ⅰ,由于驾驶员没有任何避撞动作,系统开始主动制动,施加了5.86 MPa的制动压力,产生了4 m/s2的减速度,相对速度减小,相对距离和TTC值仍继续减小。15.24 s时,TTC为1.38 s,本车车速为 45.49 km/h,满足 20 km/h<vhost<50 km/h,TTC≤1.4 s的判定条件,处于危险状态Ⅱ,此时驾驶员仍然没有任何避撞动作,系统继续主动制动,施加了约7.72 MPa的制动压力,产生了6 m/s2的减速度,TTC继续减小,在16.44 s时达到最小值1.14 s,相对速度在16.74 s时减小为0,此时相对距离达到最小值2.61 m,成功避撞,危险状态解除。
图8和图9为前车静止工况(CCRs_3)和前车慢行工况(CCRm_3)试验现场。
5 结论
提出了一种新的碰撞时间TTC的建模方法,通过充分利用车间运动信息,能够直观、准确地评估当前工况的危险程度。开发了一种基于危险判定指标TTC的主动避撞系统,设计了基于TTC和本车车速的主动避撞分级制动策略,引入了预警门限值Tw,以TTC为判定条件,设计了通过声光预警的主动避撞预警策略,且根据实车的试验结果标定了分级制动的介入时机。最后,通过实车试验,按照C-NCAP提出的AEB有效性测试方法对所开发的主动避撞策略进行了前车静止和前车慢行两种工况的验证。结果表明,所提出的主动避撞策略避撞效果较好,可有效避撞,设计的分级制动策略和预警策略符合驾驶员的避撞特性。

图6 前车静止工况(CCRs_3)试验结果
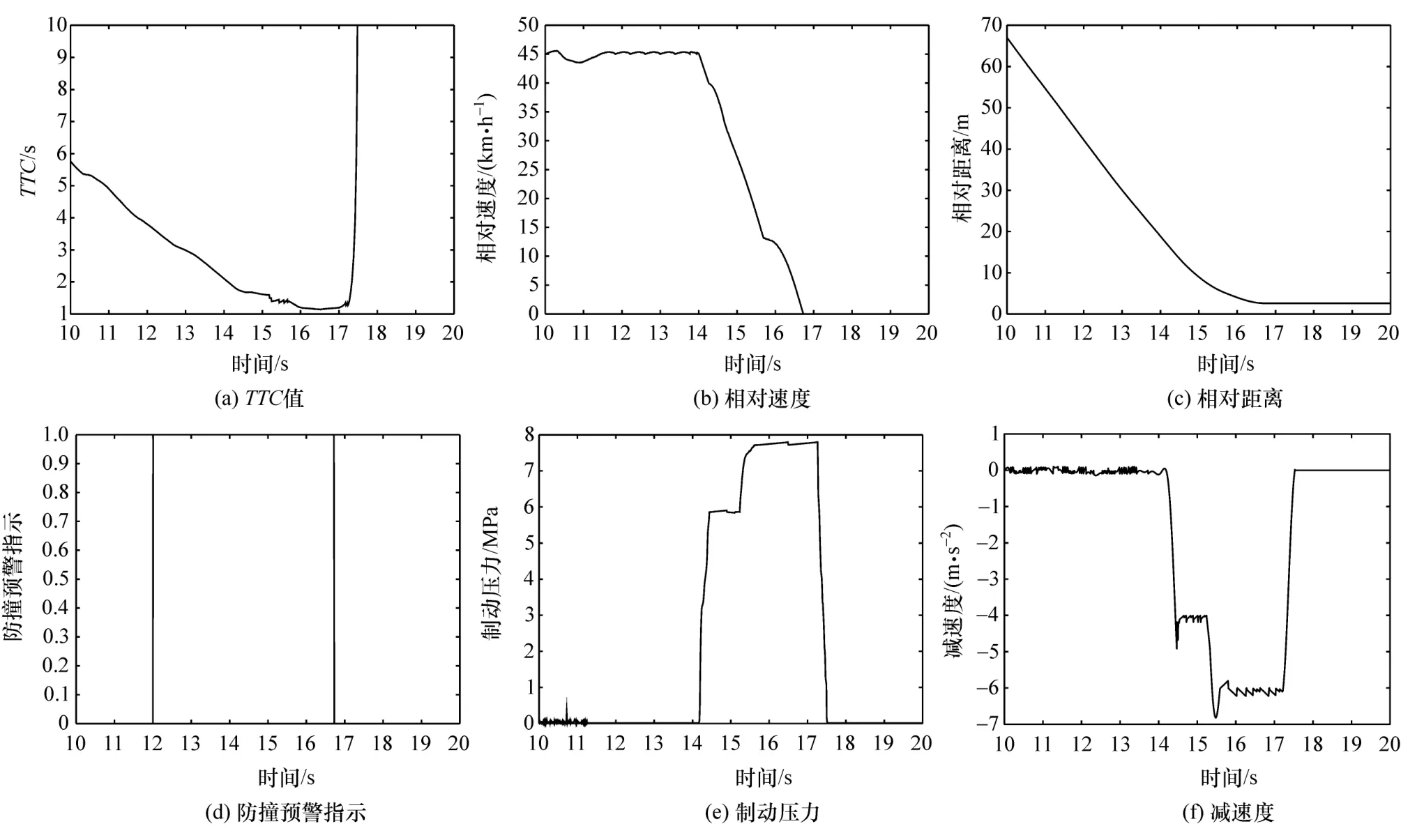
图7 前车慢行工况(CCRm_3)试验结果
但是,本文中只是通过实车试验验证了主动避撞系统在前车静止和前车慢行工况下的避撞和预警性能,后续将通过实车试验对本文中所研究的主动避撞和预警策略在前车制动工况下的性能进行验证,且根据实车试验的结果继续优化分级制动和预警策略的介入时刻及其它关键参数。

图8 前车静止工况(CCRs_3)试验现场

图9 前车慢行工况(CCRm_3)试验现场
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
煤气与热力(2022年4期)2022-05-23
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
舰船科学技术(2021年12期)2021-03-29
汽车工程(2021年12期)2021-03-08
北京汽车(2020年1期)2020-05-07
中学科技(2015年11期)2015-11-25
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14
