基于改进Hough变换的刹车蹄块片安装孔定位检测法
2019-04-12 01:55黄永华林振衡宋骆林
贵州大学学报(自然科学版) 2019年1期
黄永华,林振衡,宋骆林
(莆田学院机电工程学院,现代精密测量与激光无损检测福建省高校重点实验室,福建 莆田 351100)
刹车蹄块是摩托车、电动车鼓刹制动系统的重要组成部件,应用机器视觉技术开展刹车蹄块片外观缺陷检测和尺寸测量,实现刹车蹄块片质量无损检测自动化,减轻质检人员的工作强度,提高出厂检验效率,具有重要的意义。刹车蹄块由两个蹄块片组成,每个蹄块片内又均含有两个用于安装弹簧钩的圆形安装孔,两蹄块片相对,经弹簧拉紧形成完整蹄块。安装孔是刹车蹄块片结构外形的重要特征,其是刹车蹄块片铝铸件上的两个圆形通孔,可为检测系统建立参考点、流水线上刹车蹄块片姿态定位、测量和缺陷定位起到重要的参考作用,因此开展刹车蹄块片内圆孔检测具有重要的意义。目前圆检测法大体可分为非Hough变换法[1]和Hough变换法两大类,Hough变换是圆检测的有效工具。经典Hough变换在三维参数空间内映射投票,所需内存、计算量大。目前已经提出各种改进方法:陈珂等人以线段为投票主体进行概率Hough变换[2-3];Akihiko T等人采用随机抽取边缘点的方式进行圆检测[4-6];周封等人利用圆半径、圆心边界曲线形状等几何信息减少Hough 变换映射维数,减少无效累积[7-9]; Yuan B D等人通过功率直方图的峰值来检测候选圆[10]。针对刹车蹄块片的检测需求,本文提出在复杂轮廓边缘中,一种基于带辨向梯度Hough变换的安装孔定位检测法。
1 刹车蹄块片侧面图像采集
在刹车蹄块片流水线上设置外观缺陷检测和尺寸测量采集系统,将蹄块片有序、依次送入检测工位。为便于后续处理工作,选择与刹车蹄块片颜色对比度反差较大的黑色哑光传送带,同时为避免局部反光现象的产生,选择光照均匀度较好的球积分光源,调节合适的光照度、工业相机曝光度,对焦后获取目标图像。刹车蹄块片的铝合金铸件外形近似半圆弧状,其侧面外观凹凸不平且具有多种轮廓形状。获取图像轮廓边缘的对比、清晰度直接关系到后续检测的难度和效果,在校调各设备参数后,取得图像如图1所示。
2 刹车蹄块片侧面图像预处理
2.1 脉冲状噪声抑制
为取得对比度较好的成像效果,工业相机在较高曝光度时不可避免地会在所采集的图像中混入脉冲状噪声。经典中值滤波是滤除脉冲状噪声的简单有效方法,其能在减少噪声时,较好地保持边缘细节。本文采用经典3×3中值滤波,消除脉冲状噪声干扰。

图1 右侧含翘鼓缺陷的刹车蹄块片Fig.1 Brake pad with warping defect on the right side
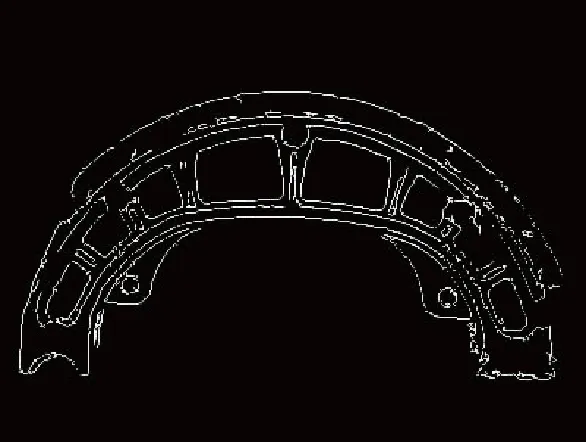
图2 刹车蹄块片二值边缘图像Fig.2 Binary edge image of brake pad
2.2 刹车蹄块片轮廓边缘提取
边缘是图像灰度级显著变化的区域,是图像的重要特征[11]。黑色哑光传送带与刹车蹄块片之间的边界,刹车蹄块铝合金铸件内凹凸不平轮廓区域,在球积分光源的照射下,形成较好的灰度对比度。Canny算法在边缘检测时具有较好的准确性、连续性和单边缘特性,其主要由梯度模值计算、非最大值抑制、进行边缘点连接的滞后阈值处理等主要步骤组成[12]。传统的Canny算法中仅使用噪声抑制能力较好的垂直、水平方向Sobel算子进行边缘梯度检测,如图3(a) (b)所示。但刹车蹄块片的摩擦皮、铝合金铸件内轮廓、安装孔等多为圆弧状边缘,考虑到各向同性、多方向边缘检测需求,本文在检测时增加了45度、-45度两个对角线方向检测算子,如图3(c)(d)所示,以提高多方向边缘检测能力,减少Canny算法边缘提取的不连续现象。
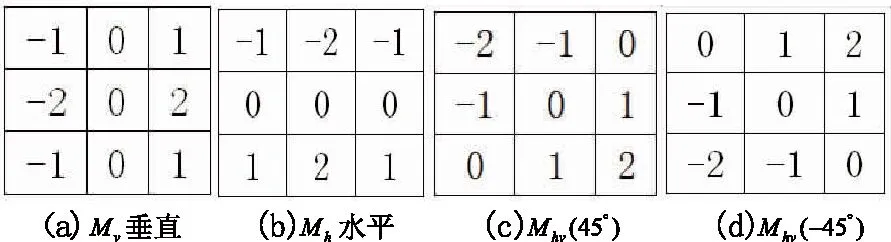
图3 方向边缘检测算子Fig.3 Directional edge detection operator
分别将四方向边缘检测算子对刹车蹄块片图像f(x,y)遍历卷积Gs=f*Ms,s=h、v、hv、vh,图像梯度模M计算如公式(1)所示

(1)
在轮廓边缘强度的非最大值抑制、进行边缘点连接的滞后阈值处理步骤中,针对刹车蹄块片侧面图像,依经验选择上限阈值、下限阈值分别为0.15和0.3,能获得较清晰、完整的外形轮廓边缘,如图2所示。
3 基于改进梯度Hough变换的安装孔候选圆粗定位
3.1 Hough变换基本原理
二维平面上描述圆的常见表达式见公式(2),其中:(xc,yc)为圆心坐标,(xi,yi)为圆周边缘点坐标,r为半径。
(x-xc)2+(y-yc)2=r2
(2)
Hough变换是将每个圆周边缘点映射成三维参数空间(xc,yc,r)的一个圆锥面。在理想情况下,圆周上所有边缘点所映射的三维圆锥面必交于三维参数空间中一点。在实际应用中,通常采用投票机制,建立对应于参数空间的三维累加器数组A(xc,yc,r),所有边缘点所映射的三维参数在累加器数组中投票并累加。累加器数组中最大值处,即为所检测圆的圆心坐标和半径。Hough变换的优点在于对圆周边缘点的连续性要求不高、鲁棒性好,但其是在三维参数空间上进行映射、投票时占用内存大、运算速度慢,计算复杂度可达o(n4),极大制约其应用。针对刹车蹄块片安装孔定位检测需求,本文提出带辨向梯度Hough变换的改进算法进行圆弧筛选并提高圆检测速度。
3.2 带辨向梯度Hough变换的改进算法
梯度是二维灰度图像f(x,y)的重要信息[13-15],梯度向量定义为公式(3),且可定义灰度由高指向低方向为正方向。
(3)
梯度方向角定义为公式(4),指向灰度最大变化率方向。
α(xi,yi)=arctan(Gy/Gx)
(4)
其中Gy、Gx可使用图3(a)(b)中垂直和水平方向Sobel算子提取。由于刹车蹄块片安装孔内成像灰度低、孔外灰度高,灰度梯度方向由孔外指向孔内,即从边缘点(xi,yi)指向圆心。理想情况下,在圆周边缘点(xi,yi)的法方向和该点处的灰度梯度方向α(xi,yi)一致,故可依灰度图像梯度方向间接获取圆周曲线上各边缘点的法方向。
带辨向梯度Hough变换的改进算法原理如下:对上述圆方程表达式(2)两边对变量x求一阶导数,得方程表达式:
(x-xc)+(y-yc)dy/dx=0
(5)
由于切线、法线相互垂直,圆周边缘点灰度梯度方向α已知时,易得dy/dx=tan(α±π/2)且其数值唯一,则公式(5)将圆周上边缘点(xi,yi)映射至二维参数空间(xc,yc)。相比于传统Hough变换,降低了所映射参数空间的维数,计算复杂度减少为o(n3)。带辨向梯度Hough变换的改进算法包含如下两方面内容:
(1)带辨向梯度的检测圆弧选择
上述灰度图像梯度向量在定义时,选择灰度由高指向低方向为正方向。分析刹车蹄片侧面图像,不难发现,从刹车蹄片最外圆周往圆心方向所形成的圆弧边缘点中梯度方向由外指向圆心(即灰度由高指向低方向)的圆弧,如图4中“○”所在边缘,其在梯度方向正方向延伸线上具有交点,能产生有效投票累加。反之,“+”所在边缘的梯度正方向背离圆心,无法形成交点。因此可利用梯度方向信息进行筛选性Hough 变换,降低对安装孔检测Hough 变换投票的干扰。
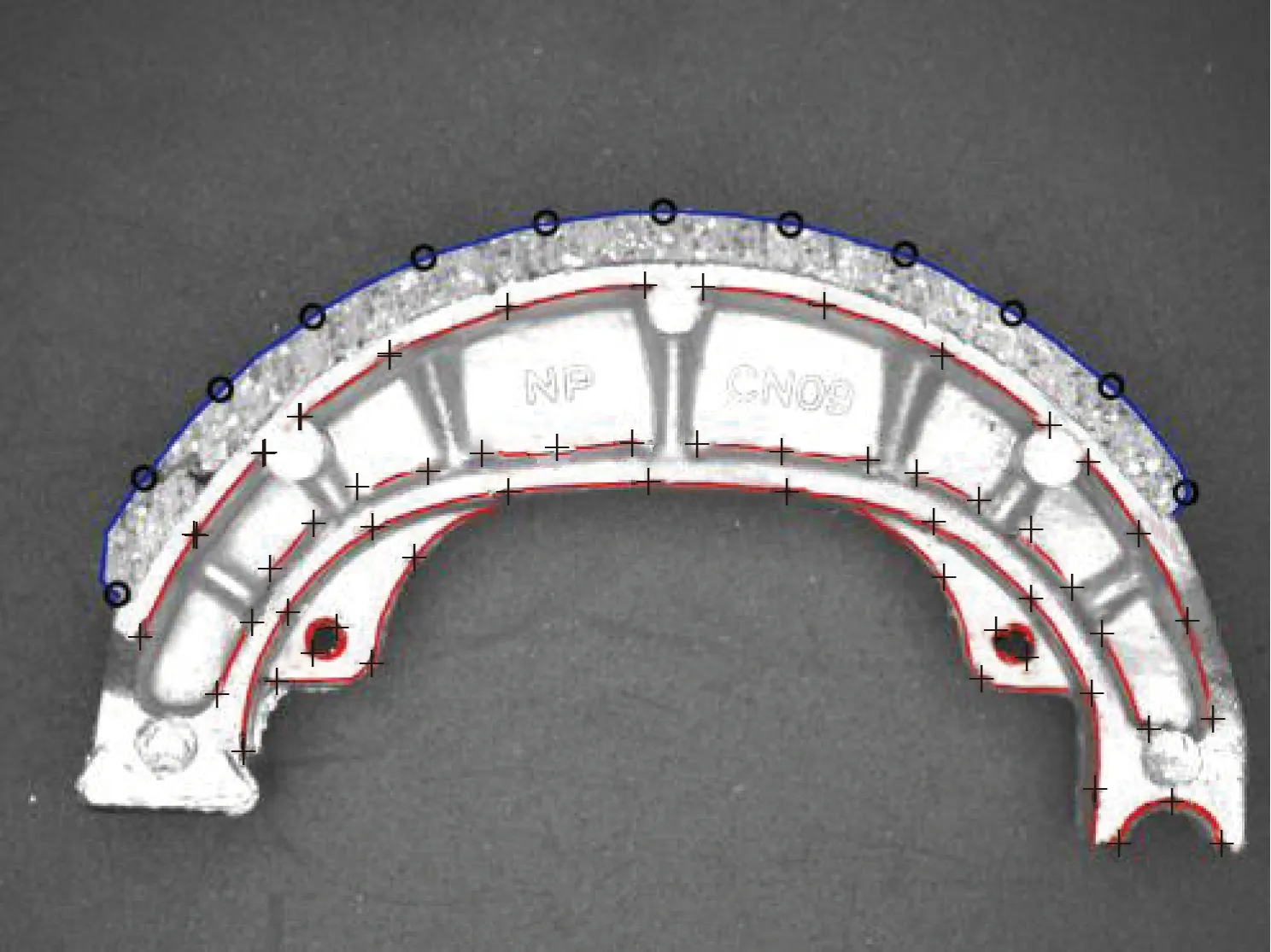
图4 带辨向梯度的圆弧Fig.4 Circular arc with orientation gradient
(2)带辨向的梯度Hough变换圆心搜索映射
在边缘点灰度梯度正方向上,将梯度进行水平Gx和垂直Gy方向分解,如图5所示。依Gy、Gx方向可辨别出此边缘点所处圆周的方位,减少圆心搜索范围。若边缘点(xs,ys)处Gy>0,Gx>0,则其法方向处于(0°,90°)内,圆心坐标(xc,yc)仅可能处于边缘点右下方侧,圆心搜索时仅需从第ys行开始向下搜索至第m行,且搜索所得xc需满足xc>xs;若边缘点处Gy<0,Gx>0,则其法方向处于(-90°,0°)内,圆心坐标仅可能在边缘点右上方侧,只需从第1行开始向下搜索至第ys行,搜索所得xc需满足xc>xs;其他两段圆弧同理。此法将圆心搜索方向减少为原来四分之一,提高了搜索效率。利用灰度图像在边缘点处的灰度梯度方向信息,在复杂轮廓边缘图像内进行带辨向的梯度Hough变换圆心搜索映射,实现特定梯度方向圆弧筛选和所映射参数空间投票,其在候选圆圆心及周边位置具有较大的投票值,如图6所示。

图5 带辨向梯度的圆边缘Fig.5 Circle edge with directional gradient

图6 带辨向梯度Hough变换投票图Fig.6 Voting chart with discriminating gradient hough transform
4 刹车蹄块片安装孔候选圆的精确定位
基于梯度的Hough变换候选圆粗定位易造成圆心定位偏移,定位精度低。本文先提取候选圆边缘区域,再采用基于最小平方误差的圆拟合法,实现对候选圆定位检测。
4.1 复杂轮廓下刹车蹄块片圆周边缘区域提取
刹车蹄块片圆边缘区域提取主要分为两个步骤:
(1)候选圆边缘点的合并

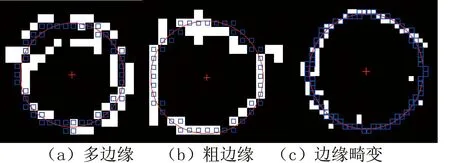
图7 边缘检测结果Fig.7 The results of edge detection
(2)提取条件合并后候选圆边缘区域
考虑到量化误差等因素,选取合并后候选圆的圆周附近边缘点:(xi,yi)∈|(xi-xc)2+(yi-yc)2-

4.2 基于最小平方误差圆拟合的候选圆精确定位
最小平方误差拟合法[2]是基于最小二乘原理的圆逼近法,定位精度高,可达亚像素级且只需对上述所检测出的候选圆边缘点集循环一次,便可获得候选圆的圆心和半径,原理如下:设候选圆边缘区域内有n个边缘点(xi,yi),将公式(1)表达式变换为:
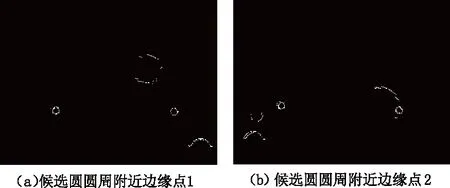
图8 候选圆边缘感兴趣区域提取Fig.8 Extraction of the interest region of candidate circle edge
(x2+y2)+ax+by+c=0
(6)
其中:a=-xc,b=-2yc,c=xc2+yc2
(7)
建立误差平方和函数如公式(7),误差平方和函数取得最小值时,所拟合的圆具有最好的精度,则要求:
(8)
(9)
(10)
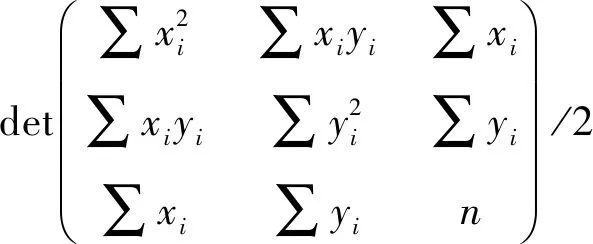
由公式(8)-(10)可得,拟合所得圆心(xc,yc)和半径r的表达式为:
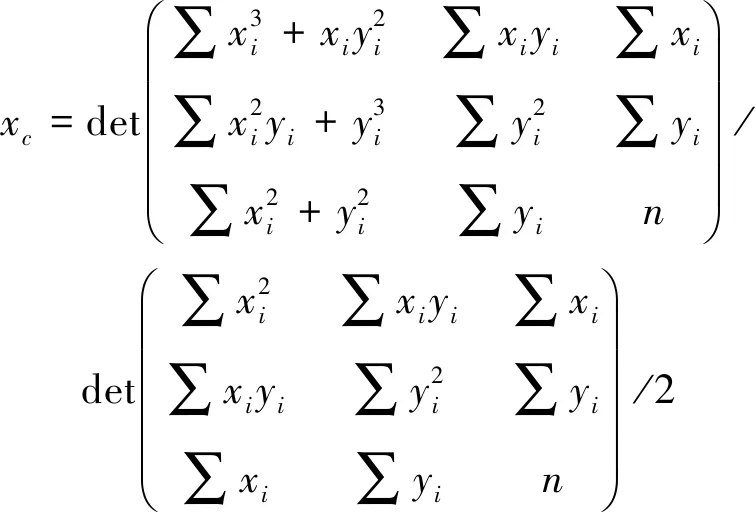
(11)
(12)

(13)
5 实验结果与分析
实验选取刹车蹄块片开展测试,检验候选圆定位检测效果。实验表明:上述方法在安装孔圆心和半径检测上具有较好的准确度,如图9(a)(b)中标记圆所示。此外,在候选圆粗定位时阈值p选定会影响安装孔的检出率和精度。由于安装孔半径较小,其圆周上边缘点数量少,在圆孔边缘畸变、噪声干扰严重的情况下,过大的阈值p会使得安装孔所在圆在粗定时无法被检测到,从而发生漏检现象,如图9(a)中右侧安装孔。而若选择过小阈值p,则会使得粗定位的候选圆数量增多,如图9(b)中标记圆,增加后续安装孔候选圆识别筛选计算量。因此本文采取选取较小阈值策略,避免漏检现象发生,再对候选圆识别筛选,经验选择阈值p=0.4时,具有较好的安装孔检出率且候选圆数量较少。

(a选择阈值p较高时 (b)选择阈值p较低时图9 阈值选择对圆检测的影响Fig. 9 The influence of threshold selection on circle detection
6 安装孔的识别筛选
如图10所示为所获取的候选圆边缘图像,其中黑色像素点为边缘点,方格像素点为精确定位后所拟合的圆边缘。不难发现,安装孔圆周边缘虽有发生畸变,但完整情况较好,而非安装孔处多为圆弧,完整度较差,因此圆完整度是安装孔识别筛选的便捷、有效方法。圆完整度可定义为:参与圆拟合的候选圆边缘点像素个数Ni与拟合所得圆的圆周像素Nci的比值Ti=Ni/Nci。经验选择Ti=0.7,能够取得较好的安装孔识别筛选效果,如图11所示,其中左半部分为安装孔识制定位效果的放大图。
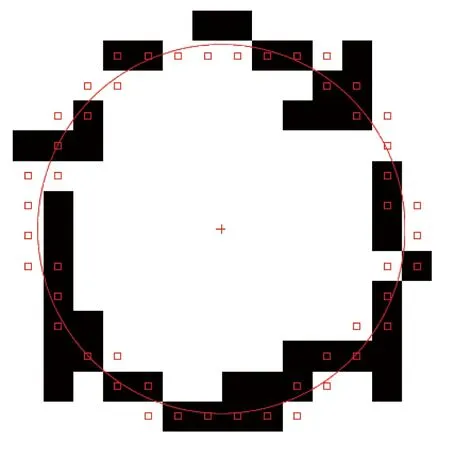
图10 圆边缘的完整度Fig.10 Integrity of circular edge
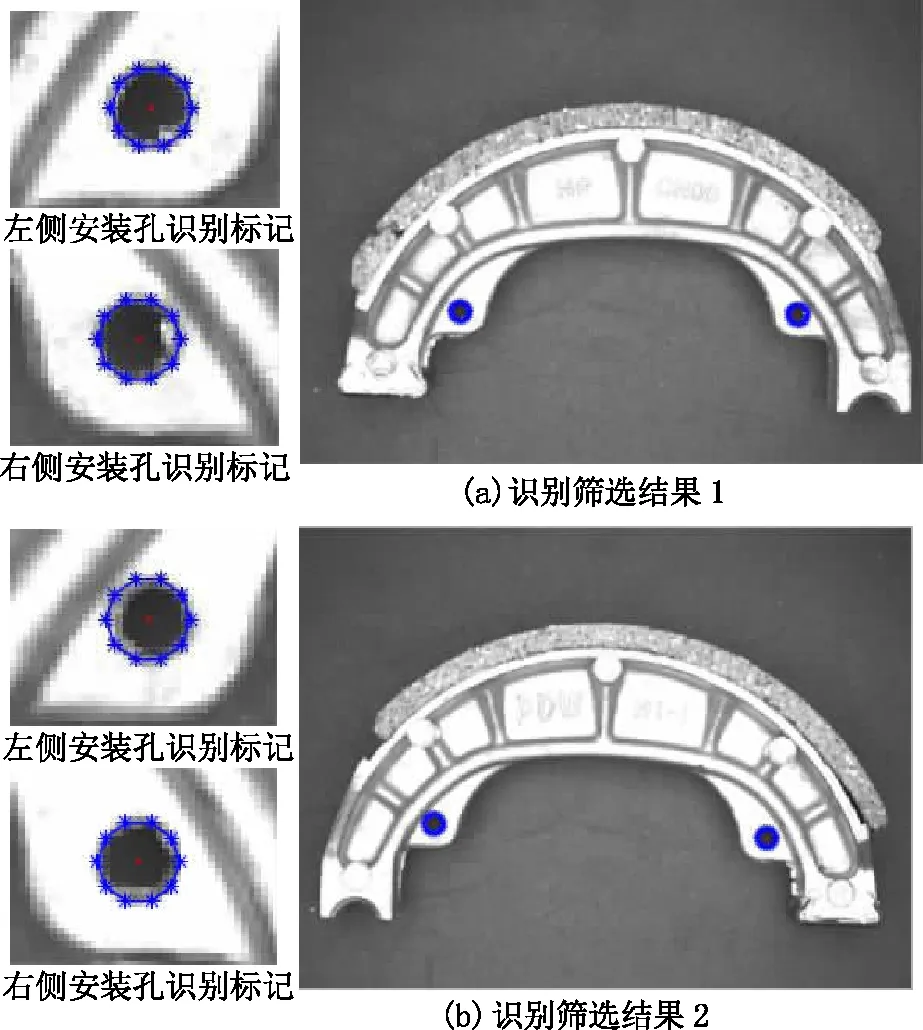
图11 安装孔的定位识别Fig.11 Location and identification of installation holes
7 结论
本文依据灰度梯度等多方面信息,提出采用带辨向梯度Hough变换的改进算法实现候选圆粗定位和基于候选圆边缘区域提取和精确定位的两步定位法,再依据圆完整度进行安装孔识别筛选。实验表明:该方法在复杂轮廓边缘下能较好地实现刹车蹄块片安装孔定位检测,定位圆心较为准确与实际边缘误差小,具有较好的应用价值。
猜你喜欢
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
应用数学(2020年2期)2020-06-24
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
中等数学(2018年1期)2018-08-01
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
中国自行车·骑行风尚(2014年2期)2014-05-07
数学教学通讯·初中版(2014年1期)2014-02-14