
基于图像处理的白酒酒花轮廓检测
2019-04-16 12:18杨静娴任小洪
食品与机械 2019年12期
杨静娴 任小洪
(1.四川轻化工大学人工智能四川省重点实验室,四川 宜宾 644000;2.四川轻化工大学自动化与信息工程学院,四川 宜宾 644000)
近年,随着数字经济的发展,酿酒工艺数字化、智能化[1-3]和信息化[4-7]已成为发展趋势。在传统的摘酒过程中,酒度的范围都是人工通过经验来判断,白酒酿制工人通过“看花摘酒”和“边摘边尝”的方法对白酒度数进行判断,从而实现对白酒度数的分级,这样的判断存在分级不稳定性以及不确定性的问题[8]。因此,实现白酒摘酒过程中度数分级智能化已经是必然的发展趋势。对白酒摘酒工艺的研究通常从白酒多个方面的特征考虑。例如,陈林等[9]提出从酒精水溶液浓度、温度、酒精体积分数关系进行酒精度模型搭建,通过音叉密度计监测基酒密度,再将模型转化为酒精度,对比实测酒精度与预测酒精度之间的差异,实现酒精度的预测;何盛国等[10-11]通过检测基酒中的四大脂,传送到控制系统,通过实测脂含量与预设含量的对比,通过脂含量的固定范围将基酒进行分级,实现自动化摘取,但在此研究中会受到酒醅物性、装甄工艺的影响,同时需要大量样本的学习。除此以外,大多数白酒智能化研究都是基于白酒风味物质[12]、含量[13-14]、变化规律[15-16]进行。
现阶段除人工摘酒外,已有企业采用的酒精度检测仪进行自动摘酒,但存在价格昂贵、在线检测效果不理想等问题,而通过机器视觉技术、图像处理技术相结合的方法具有成本低、方便快捷、易于实现大规模摘酒的优点。文章拟分析和讨论一种基于图像处理技术的白酒酒花轮廓检测的方法,以期实现酒花分级摘酒的智能化。
1 白酒酒度分级基本信息
在现阶段,白酒在生产中通常实现的是三段摘酒。在白酒蒸馏开始后,通过人工的方法进行“看花摘酒”“边摘边尝”等操作实现白酒酒度的分级。在白酒蒸馏过程中,蒸馏液流入酒桶中,水、酒精由于表面张力的作用而激溅起的气泡,称为“酒花”。酒花的大小以及酒花的滞留时间长短便作为白酒酒度的一种判别方法。
针对某酒厂的白酒摘酒酒度分级中的酒花进行示例见表1。

表1 宜宾某酒厂白酒酒花分类
在摘酒时要掐去酒头与酒尾,分别贮存,可以选择合适的馏分用于后续的勾兑白酒,也可将酒头与酒尾混合,一起进行再次蒸馏。
要实现对酒花的分级,得到摘酒过程中的酒花轮廓图便是关键所在,通过对白酒酒花的轮廓获取,可以更加清晰地对白酒酒花进行分级,从而实现对白酒酒度的分级。
2 轮廓检测方法的设计与分析
2.1 图像处理流程设计
基于图像处理的白酒酒花轮廓检测方法是在Visual studio+opencv平台上进行的,通过对多种处理流程以及处理算法的试验,最终确定在对白酒摘酒图像进行以下的检测流程,方法能够很好地获取到在摘酒过程中的白酒酒花,具体流程图如图1所示。
通过对白酒摘酒原始图像进行以上的预处理方法后,能够消除图像中的大量噪声,并在OTSU算法以及Canny边缘检测相结合的方法下能够获得相对精确清晰的大清花以及小清花酒花轮廓,为实现在白酒摘酒过程中的白酒酒度分级打下基础。在以下将对大清花以及小清花的图像进行算法实现。
2.2 白酒酒花图像分析
通过在宜宾某酒厂进行数据采集,在同一光照条件下,采用1 600万像素拍摄工具进行视频拍摄,对同一甄酒的摘酒酒花进行了数据采集,获取了在现阶段人工摘酒时大清花和小清花的观测图像。在采集的图片中可以看出,受到蒸馏液击打在白纺布上飞溅的影响以及动态酒的影响,图像中只有部分能够观测到酒花的轮廓。因此,为了避免大量噪声的影响,只针对所获取图像的部分进行图像处理,即选取感兴趣区域(region of interest,ROI)进行白酒酒花的轮廓检测。在文中主要是通过图像处理部分对酒花图片进行分析,因此采用鼠标截取酒泡清晰的部分,对比选取最优的ROI区域进行接下来的图像处理部分。在应用中可以通过固定出酒管的位置设置矩形区域进行ROI区域的选择再进行后续的图像处理。根据多次试验对比,ROI区域的像素控制在300×300左右能够获得较为全面的酒花图像。原始图像以及酒花处理部分如图2所示。
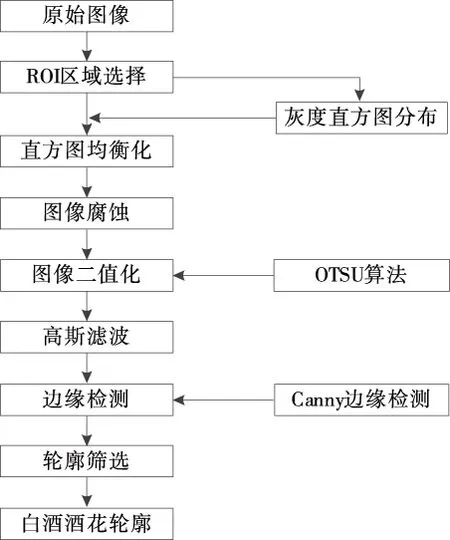
图1 检测流程图

图2 原始图像以及酒花处理部分
通过图2可以看出,白酒酒花的图像提取受到酒桶、酒装、蒸馏酒流以及光照等因素的影响,经过ROI提取后的酒花图像能过够大部分的删除包含酒桶、酒装的影响,将图像处理区域减小。通过观察ROI区域图像可看出,白酒酒花图像仍然存在酒花粘连、边缘不清晰、酒花高光区域等影响因素,在不同的光照条件所获取的图像在亮度方面也是存在差异的。白酒酒花为无色透明状,在透明酒花中存在严重的反光现象,造成了酒花与背景之间的差别不明显,对白酒酒花轮廓的提取造成了较大的困难。实现白酒酒花与背景的分离,消除酒花中存在的反光现象是实现白酒酒花轮廓检测的关键。
3 轮廓检测方法的实现
3.1 图像预处理
在所获得的ROI图像中,图像的对比度较低,酒花与背景之间的分割不明显,通过酒花的灰度直方图进行分析。在图3(a)中,由于受到阴影以及边缘不清晰的影响,直方图中酒花区域较小且集中在灰度级的偏左部分,相应的对比度也就不明显;在图3(b)中由于受到酒花反光以及大部分的白色细花的影响,出现了多个峰值。
在灰度直方图中,灰度值的范围变化较小,图像整体较暗,对比度不强。直方图均衡化是常用的图形增强的方法,通过直方图均衡化,可以拉伸像素强度分布范围,以此来增强图像中的对比度,获得更加明亮的图像。白酒酒花的直方图均衡化后的图像如图4所示。
在白酒酒花图片中,由于酒花边缘相互粘连,造成酒花之间的分界不清淅。通过图像的腐蚀,可以求得局部最小值,将图像中的部分粘连进行消除,降低噪声。通过图像的腐蚀,得到去除了酒花中大部分高光区域的图像,使每个酒花呈现出与边界相似的灰度级,酒花与背景之间的差别更明显,每个酒花的轮廓也更加清晰。通过图5酒花腐蚀图像可以看出,相邻酒花之间的边界更加清晰,酒花中高光区域产生的影响也得到了改善。
3.2 酒花的边缘检测
不同的灰度值之间会存在界限,这种界限称为边缘,直接通过以上腐蚀图像进行边缘检测,仍然会出现很多噪声边界,为了能够获得更加清晰的酒花边界,进行图像的二值化是获取更加精确酒花轮廓的关键步骤。

图5 酒花腐蚀图像
3.2.1 图像的二值化 图像二值化将图像处理成只含有黑色和白色两种颜色,能够更好地保留图像中目标物体的形态信息,减少图像中颜色信息与背景信息可能在图像处理中存在的影响。
图像二值化,最重要的就是对分割阈值的选取。在灰度平均值二值化方法中,将整幅图像的灰度平均值作为二值化的阈值;在双峰法中,是根据直方图中的两个最高峰值之间的峰谷最低值进行阈值的设定。这两种方法进行阈值选取时都具有局限性,会导致图像部分的边缘像素丢失,使二值化图像不能反映真实的图像信息。
相比之下,图像二值化方法中的OTSU算法(也称为大津法或是最大类间方差法)是自适应阈值分割算法,不需要实时监督,属于自动进行最优阈值选取的图像分割法[17-19]。采用该算法利用自适应阈值分割将酒花图像分割为酒花与背景两部分。通过计算得到最佳的分割阈值来区分背景与前景两类像素,使前景与背景两类像素的区分度最大。
运用OTSU算法进行最佳的阈值选取后,通过将图像中每一个像素点的灰度值与最佳分割阈值相比较,便可以分割出图像的酒花与背景,图6为酒花OTSU图像。

图6 酒花OTSU图像
3.2.2 边缘检测 在进行边缘检测时,常用的有Sobel算子、Laplacian算子、Canny算子等。Sobel算子通过求导计算图像灰度函数近似梯度;Laplacian算子是n维欧几里得空间中的一个二阶微分算子;Canny边缘检测是一种多级边缘检测算法,Canny使用变分法,是能够表示出尽可能多的实际边缘同时减少噪声误报的函数方法,使得到的边缘与实际边缘更加接近[20-21]。在进行边缘检测前,通常会对图像进行滤波处理,最常用的滤波方法是高斯滤波[22]。
高斯滤波是一种线性平滑滤波,可以消除噪声,并且使图像边缘更加平滑。高斯滤波的具体操作是用模板中确定的领域内像素的加权平均灰度值去代替模板中心像素点的值。通过对OTSU图像进行高斯滤波处理,会得到更加平滑的酒花边缘,使进行边缘检测时得到的酒花轮廓更加接近真实酒花轮廓。白酒的酒花高斯滤波图如图7所示。

图7 酒花高斯滤波图
高斯滤波后进行图像的边缘检测对比,选取最优的边缘检测算子进行后续酒花图像处理。在Sobel算子进行一阶导数计算时,内核值的设置会对图像边缘提取产生不同的边缘,并且在内核值选取为1时,图像没有进行高斯平滑操作;在Laplacian算子中也存在内核值的选择,相比之下,在内核值选取为3时,得到的边缘轮廓图像较为清晰;在Canny算子中默认内核值大小为3,在此时,所获得的边缘轮廓相比其他两种算子的边缘更加清晰,如图8所示。因此,选取Canny算子进行酒花边缘检测。
在进行Canny边缘检测的图像已经是经过OTSU算法二值化后并滤波的图像,在图片中只存在两个像素值,不存在传统的Canny边缘检测中需要设定高低阈值的困难,任意的阈值设定均可以实现图像在此时的准确边缘检测,白酒酒花的边缘检测如图9所示。

图8 边缘检测对比图
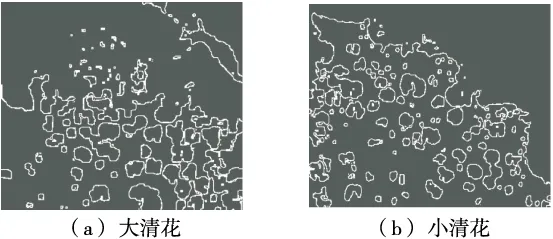
图9 酒花Canny边缘检测图像
3.2.3 轮廓提取 在已经得到的边缘检测图像中,仍然存在部分的由于蒸馏酒飞溅以及酒花高光区域产生的误差,但是这些噪声产生的边缘轮廓都远小于实际的大清花与小清花的酒花大小,可以通过筛选实际面积的方法获取更加清晰明确的酒花图像。在边缘轮廓检测图像中,可以清晰地看出大清花图像与小清花图像之间的差别。在大清花图像中,大酒花的数量较多,且分部集中;小清花中也存在少量的大酒花,但是数量较少、分布较散。白酒的酒花边缘轮廓检测图像如图10所示。

图10 酒花边缘轮廓检测图像
4 结论
文章主要针对生产现场采集的白酒酒花视频图像进行图像处理,在图像预处理采用直方图均衡化和图像腐蚀进行了酒花图像中高光噪声的消除,采用OTSU算法与Canny边缘检测算法结合的方法,获取清晰的酒花边缘轮廓,对大清花图像与小清花图像进行了对比研究。结果表明,采用机器视觉的智能摘酒方法是可行的。在后续的工作中将进一步开展多等级酒花分类算法研究,并依据酒花图像建立在一定场景下的酒花分级阈值和判断标准。通过选择合适的工业摄像机采集摘酒过程中的酒花图像,并进行酒花图像的实时处理,实现白酒摘酒的智能自动化。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2022年4期)2022-08-22
现代临床医学(2022年2期)2022-04-19
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
电子制作(2019年15期)2019-08-27
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
