客车LDWS与FCWS性能测试研究
2019-04-17 06:32牛成勇苏占领吴昆伦徐建勋
客车技术与研究 2019年2期
牛成勇, 苏占领, 吴昆伦, 胡 雄, 徐建勋
(1.重庆车辆检测研究院有限公司 国家客车质量监督检验中心,重庆 401122; 2.汽车主动安全测试技术重庆市工业和信息化 重点实验室, 重庆 401122; 3.自动驾驶系统及智能网联汽车技术研发与测试应用重庆市工程研究中心, 重庆 401122)
前撞预警系统(forward collision warning system,FCWS)与车道偏离系统(lane departure warning system,LDWS)可在汽车临近危险状态时及时提醒驾驶员做出预防措施,以有效降低事故发生概率、提高行驶安全性[1]。随着汽车智能化、电动化的不断发展,交通运输行业标准JT/T 1094—2016[2]和JT/T 1178.1—2018[3]相继发布、实施,不同类型的ADAS系统(包含FCWS、LDWS)将大量装备在汽车上,尤其在营运客车和营运货车领域。鉴于此,有必要对国内外的FCWS和LDWS产品相关性能进行测试研究,为国内整车厂及相关零部件厂的研发提供参考。同时,指出标准中某些评价指标存在的问题并提出合理建议,希望对标准的进一步修订提供技术支持。
1 LDWS性能测试研究
根据标准JT/T 883—2014[4]的要求,LDWS性能评价试验项目为弯道(目前有两种弯道曲率半径)报警产生测试、直道可重复性测试、虚警测试,其基本覆盖了国内外标准的典型特征测试项目,能够对LDWS性能进行较为客观、完善的测试评价[5]。
测试LDWS所需主要仪器为英国生产的SR150驾驶机器人(包括转向、制动油门组合机器人);AVAD2/AVAD3声光采集系统(可采集0~5 kHz频段的声音)、牛津 RT 3002+GPS差分基站(厘米级定位精度)。测试车辆为营运客车,空载状态(系统会根据载荷不同而进行自校准)。
1.1 LDWS测试评价
1.1.1 弯道报警产生测试
根据标准要求[4],设置如图1所示的弯道报警产生测试方法:测试车辆以规定试验车速进入测试车道,跟踪行驶至稳定状态后,以某一偏离速度偏离出弯道(内侧/外侧)。测试车辆应在两种弯道情形(左转弯和右转弯)、在两种偏离速度范围(0~0.4 m/s 和0.4~0.8 m/s)内,向左侧和右侧各偏离一次。

图1 弯道报警产生测试方法
判定依据:在每次测试中,LDWS应保证车辆在越过最早报警线(车道线内0.75 m)后,未越过最迟报警线(商用车辆为车道线外1 m)之前发出报警。
测试结果:表1是该营运客车在弯道以65 km/h速度行驶、两种偏离速度的工况下, LDWS 弯道报警位置点的偏离距离的测试结果。

表1 电动客车LDWS弯道报警产生测试结果
注:表中报警时刻位置要求车辆前轮外缘位于车道线外侧时为“正”,位于车道线内侧时为 “负”,车道线为“0 m”
1.1.2 直道可重复性测试
根据标准要求,设置如图2所示的直道重复性产生测试方法:测试车辆以规定试验车速在一段直路上行驶,跟踪行驶至稳定状态后,以某一偏离速度偏离出直道(左偏/右偏)。测试车辆应在两种偏离情形(左偏和右偏)、在两种偏离速度范围(0.1~0.3 m/s和0.6~0.8 m/s)内,每组进行4次测试,共计16次测试。

图2 直道可重复性测试方法
判定依据:LDWS应保证车辆在越过最早报警线(车道线内0.75 m)后,未越过最迟报警线(商用车辆为车道线外1 m)之前发出报警;应通过单组4次试验中的3次,且通过共需16次试验中的13次试验。
测试结果:图3是该客车在直道以65 km/h速度行驶、横向偏离速度为0.79 m/s的测试工况下, LDWS报警位置点及报警信号测试结果。图中,触发报警信号的时刻所对应的偏离车道线距离即为LDWS 的报警位置点(车道线外侧0.18 m)。

图3 客车LDWS报警信号及报警距离结果
1.1.3 虚警测试
测试车道:直道,总长1 km;判定依据:当车辆在非报警区域正常行驶时,系统应不发出报警;测试结果:该营运客车在虚警测试中未发生误报警,符合试验标准要求。
1.2 存在问题及建议
目前,LDWS测试评价存在以下问题:
1) LDWS测试方法主要针对特定工况的试验场景和试验道路。然而,对于恶劣场景的测试则更多由系统生产厂家进行内部研发验证,其测试场景缺少相关的标准依据且无法提出统一的评价指标。
2) 就现阶段的LDWS评价指标而言,商用车最迟报警线位于车到边界外侧1m处,该标准要求过低。例如,对于两款LDWS产品,在满足标准要求的前提下,不能有效评判报警早晚的优劣性,即不能很好地评价两者的性能差异性和优劣性。
随着LDWS广泛应用于营运客货车及乘用车,应综合全面评价其系统可靠性与有效性。因此,针对LDWS测试与评价提出如下建议:
1) 基于摄像头的环境适应性及可靠性相对较差,故可在复杂光照条件、破损模糊车道线、雨、雪、雾等恶劣工况下进行独立零部件识别性能测试,进一步提升系统的可靠性和稳定性[5-7]。
2) 现阶段的LDWS初始报警车速大多设置为50~60 km/h,为应对不同路况条件(如平坦路面、山区、郊区等),系统开发商可提供多模式的车道偏离报警初始车速(如配备可供驾驶员操作的初始车速调节按钮),进一步提升客车的行驶安全性。
2 FCWS性能测试研究
依据标准JT/T 883—2014的要求,设置如图4所示的预警时间试验场景对FCWS性能进行测试与评价[4,8-10]。

(a) 静止假车

(b) 移动假车
FCWS测试所需主要仪器为英国生产的SR150驾驶机器人(包括转向、制动油门组合机器人),前后车均需安装;AVAD2/AVAD3声光采集系统(可采集0~5 kHz频段的声音)、牛津 RT 3002+GPS差分基站(厘米级定位精度)+双车通信模块;EVT目标假车。
2.1 客车FCWS测试评价
该营运客车的3种FCWS传感器方案为:基于单目摄像头方案(代号:A);基于毫米波雷达方案(代号:B);基于摄像头+毫米波雷达信息融合方案(代号:C)。
2.1.1 CCRs测试评价
1) 试验方法:试验场景如图5所示。注意:目标假车与测试车辆两者间的车身纵轴线间距不超过1.6 m。

图5 CCRs试验示意图
2) 评价指标:若系统在碰撞时间TTC≥2.7 s时发出碰撞警告,则本次试验通过并结束。
3) 合格判定条件:连续试验不少于7次,TTC大于规定值表示此次试验成功,成功次数≥5且未连续2次失败表示试验通过。
4) 测试结果及分析:从图6可以看出,基于单目摄像头的FCWS的TTC响应波动较大(标准差:0.48),稳定性较差;相对于机器视觉系统而言,基于毫米波雷达的FCWS的TTC数据分布均位于标准要求限值之上,且数据稳定性相对较好(标准差:0.15);而基于毫米波雷达与摄像头信息融合的FCWS响应最为稳定且重复性最好(标准差:0.02),其TTC值均接近于标准要求的2.7 s阈值,预警时间合适,不会因系统过早报警而干扰驾驶员正常驾驶,影响行车安全。
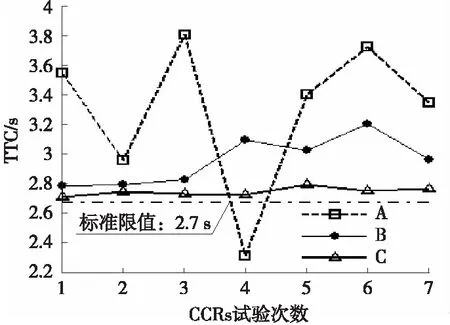
图6 CCRs工况下不同FCWS传感器方案的TTC响应数据
除此之外,试验过程中虽有不合格的情况发生(TTC< 2.7 s),但仍然满足目前的标准法规要求。同时,标准中未规定上限阈值,这极有可能使ADAS供应商为满足要求,在设计FCWS时将TTC提前(即提前报警,只要TTC≥2.7 s即可),极大干扰驾驶员正常驾驶。
2.1.2 CCRm测试评价
1) 试验方法:试验场景如图7所示。注意:目标假车与测试车辆两者间的车身纵轴线间距不超过1.6 m。

图7 CCRm试验示意图
2) 评价指标:若系统在碰撞时间TTC≥2.1 s时发出碰撞警告,则本次试验通过并结束。
3) 合格判定条件:连续试验不少于7次,TTC大于规定值表示此次试验成功,成功次数≥5且未连续2次失败表示试验通过。
4) 测试结果及分析:从图8可以看出,基于单目摄像头的FCWS的TTC响应波动依然较大,响应数据标准差为0.32,其可靠性与重复性有待进一步优化、提升。以毫米波雷达为传感方案的FCWS性能较为稳定,试验重复性较好;基于摄像头+毫米波雷达信息融合的FCWS性能最为稳定,表现最佳且TTC响应最接近于标准规定的下限阈值(2.1 s),保证预警时间安全裕度的同时又可确保不干扰驾驶员的正常驾驶。

图8 CCRm工况下不同FCWS传感器方案的TTC响应数据
2.1.3 CCRb测试评价
1) 试验方法:试验场景如图9所示。注意:目标假车与测试车辆两者间的车身纵轴线间距不超过1.6 m。

图9 CCRb试验示意图
2) 评价指标:若系统在碰撞时间TTC≥2.4 s时发出碰撞警告,则本次试验通过并结束。
3) 合格判定条件:连续试验不少于7次,TTC大于规定值表示此次试验成功,成功次数≥5且未连续2次失败表示试验通过。
4) 测试结果及分析:由图10的TTC响应折线图可知,以摄像头+毫米波雷达为传感方案的FCWS表现依然优异。由于摄像头只能通过像素距离拟合出空间距离曲线而近似获得相对距离等信息,故其深受“测距精度”瓶颈的影响而对TTC控制较为困难。同时,摄像头环境适应性较差,即鲁棒性差,易受视野、夜晚暗光、雨雪天气等因素影响而导致“漏检”,预警功能失效[1]。

图10 CCRb工况下不同FCWS传感器方案的TTC响应数据
2.2 存在问题及建议
1) FCWS的关键在于“测距”,尤其是基于视觉的FCWS产品需不断优化测距算法以提升系统预警可靠性与稳定性,确保安全裕度。为解决系统可靠性、稳定性及环境鲁棒性问题,采用摄像头+毫米波雷达信息融合技术是目前主流的解决方案[11-12]。
2) JT/T 883—2014标准中对碰撞时间TTC只有下限值要求、无上限阈值,这将导致ADAS供应商“单纯地”为法规要求的TTC要求而将其提前,干扰正常驾驶,产生负面影响。基于此,建议修订标准中的TTC要求,规定上限阈值(可设置上限阈值为4 s),合理规定TTC安全裕度,确保预警系统的有效性与功能安全性。
3) 在JT/T 883—2014标准中,只规定FCWS针对车辆或具有车辆属性的柔性替代物(如EVT目标假车)的检测,未涉及行人检测。为进一步深入验证系统功能的完整性、有效性,建议增加行人识别测试,如行人横穿和纵向行走两种测试工况。
3 结束语
本文根据JT/T 883—2014标准,选取最具代表性的基于摄像头和毫米波雷达融合方案、单独摄像头方案的某营运客车的LDWS和FCWS两种辅助驾驶功能进行了性能测试与评价研究,同时指出了目前商用车辆在LDWS和FCWS测试与评价方面存在的问题并提出相关建议。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
今日农业(2021年20期)2021-11-26
商用汽车(2021年4期)2021-10-13
知识就是力量(2018年8期)2018-08-16
课外生活(小学1-3年级)(2018年4期)2018-05-26
分忧(2017年8期)2017-08-03
小学生·多元智能大王(2015年3期)2015-05-25
现代电子技术(2014年21期)2014-11-07