
混合对转推进系统水动力性征数值研究
2019-04-20 06:00曾旺李晔秦江涛
中国舰船研究 2019年2期
曾旺,李晔,秦江涛
1上海交通大学海洋工程国家重点实验室,上海200240
2武汉理工大学高性能舰船技术教育部重点实验室,湖北武汉430063
0 引 言
船舶推进器是船舶设计领域的重要研究对象,推进器的种类和性能直接影响船舶的航行性能和营运经济性。随着船舶大型化、高速化和绿色化的发展,传统螺旋桨推进方式在部分船舶中往往不能满足操纵、效率、振动、噪声以及布置等方面的特殊使用要求[1]。部分特种形式的推进器由于在效率和操纵性等方面的优势,受到了业内的广泛关注,如对转螺旋桨和吊舱推进器等。对转螺旋桨的后桨通过回收前桨旋转尾流的部分能量来提高推进系统的效率[2-3];吊舱推进器的吊舱桨由吊舱模块中的驱动电机驱动,且整个吊舱可以全方位转动,从而改善了船舶的操纵性和机动性[4-5]。
以对转螺旋桨和吊舱推进器为基础,ABB公司于2000年提出了一种混合对转推进系统(CRP)(图1)。该推进系统的前桨为传统螺旋桨,后桨为可水平全方位旋转的吊舱推进器。CRP综合了对转螺旋桨和吊舱推进器的优点,具有较高的推进效率、良好的操纵性能和空泡性能[6]。
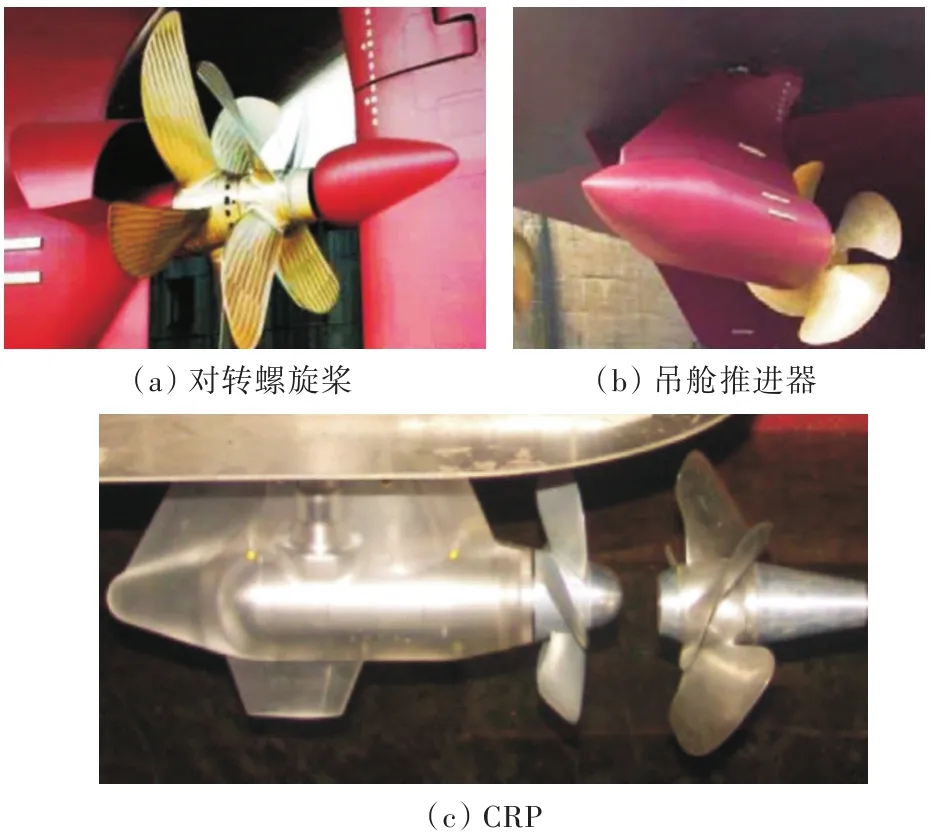
图1 特种形式推进器Fig.1 Special type propellers
国外关于CRP的相关研究较多,日本的三菱重工水池、韩国的三星拖曳水池[7]、荷兰的MARIN水池、芬兰的VTT[8]等机构均针对CRP开展了研究,主要研究了CRP的功率分配比、螺旋桨参数等对推进系统效率与空化性能的影响。国内学者盛立等[9-10]对CRP进行了数值研究和试验研究,对其敞水性征进行了数值预报,并借助空泡水筒开展了相关模型试验与数值结果验证工作。CRP目前已应用于实船,日本三菱重工公司采用CRP的2艘客滚船Hamanasu与Akashia号已经投入营运,并表现出了优良的推进性能。
当前针对CRP的研究大多针对给定几何及布置参数的CRP的水动力性征进行数值模拟或试验,而关于CRP中螺旋桨和吊舱推进器各自的推进性征,以及各推进成分之间的相互影响规律等方面的系统研究较少。本文将通过求解单独螺旋桨、单独吊舱推进器和CRP这3种推进器的水动力性能,探讨CRP中螺旋桨和吊舱推进器各自的水动力性能,进一步研究CRP中螺旋桨和吊舱推进器相对于它们单独工作时水动力性能的差异,并将分析前后桨相互作用对各桨推进性能的影响规律,以期为CRP的优化设计和工程应用提供参考。
1 数值方法与数值模型
1.1 数值模拟对象
为了对比分析CRP与单独螺旋桨、单独吊舱推进器的敞水性征差异,分别对3种推进器的敞水性能进行数值模拟,其中螺旋桨和吊舱桨的主要参数如表1所示。CRP由上述螺旋桨与吊舱推进器组合,即CRP的前桨与单独螺旋桨一致,后桨采用吊舱桨,前、后桨间距为0.4倍前桨直径,3种推进器桨叶均采用MAU图谱桨型。3种推进器的几何模型如图2所示。

图2 推进器几何模型Fig.2 3D-model of propellers
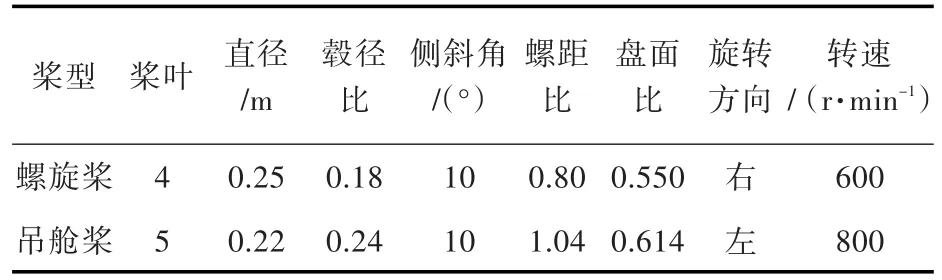
表1 螺旋桨和吊舱桨主要参数Table 1 Main parameters of propeller and pod
1.2 流动控制方程
以推进器的粘性湍流场为数值模拟对象,数值模型的控制方程为RANS方程:

式中:ρ为流体密度;ui,uj分别为绝对速度矢量的i分量和j分量;p为静压;μt为湍流粘度;为雷诺应力项;当 i=j时,δij=1,当i≠j时,δij=0。
1.3 计算域、边界条件与离散网格
由于存在前、后桨桨叶、舱体、吊舱支架之间的相互干扰,因此采用滑移网格法(Sliding mesh)来处理各部分之间的相对旋转问题。该方法将计算域划分成2个或多个区域,每个区域与其相邻区域存在交界面,通过保证交界面两侧的通量相等来进行数据交换,从而模拟流场中相对旋转物体间强烈的相互作用,该方法具有捕捉流场非定常特性的能力[11]。本文采用滑移网格方法,分别对单独螺旋桨、单独吊舱推进器和CRP的敞水性征进行了数值模拟。单独吊舱推进器的流场计算域分为2个部分:吊舱桨旋转区域,以及包含舱体与支架的静止区域。CRP的流场计算域分为3个部分:前桨右旋区域、后桨左旋区域,以及包含舱体与支架的静止区域。
数值模型边界条件中,桨叶、螺旋桨轴与桨毂、舱体与支架均为无滑移壁面,入口为速度入口,出口为压力出口,存在相对滑移运动的界面设置为交界面。
采用切割体网格(Cutcell)对计算域进行离散,其中在桨叶、舱体、支架等近壁区域采用棱柱层网格,以满足近壁流场捕捉的要求;通过面控制和特征线控制,对曲率较大的螺旋面附近的网格进行加密,通过体控制,对近壁面流域进行局部加密,以提高流场捕捉精度。单独螺旋桨计算域网格总数约为110万,单独吊舱推进器计算域网格总数约为132万,CRP计算域网格总数约为178万,各推进器计算域典型剖面的网格分布如图3所示。
1.4 湍流模型与近壁处理方法
选用Realizable k-ε湍流模型确保方程组封闭。该模型由标准k-ε模型改进而来,湍流黏度系数μt与应变率相关,避免在时均应变率较大时产生负的正应力。
Realizable k-ε湍流模型适用于Re数较大的湍流核心区,在黏性力占主导地位的近壁区,湍流的脉动影响不如分子黏性的影响大,需要对湍流模型进行修正。采用壁面函数法对近壁面区域进行处理,网格布置上需将距壁面法向的第1个节点布置于对数律区域。

图3 典型剖面的离散网格Fig.3 Discrete grids of propeller,pod and CRP
2 数值计算结果与分析
2.1 水动力性能数据表达
数值计算结果以无因次化参数表述,其中进速系数J统一表述为:

式中:VA为来流速度(进速);nA为吊舱桨转速;DA为吊舱桨直径。
单独螺旋桨与吊舱桨的推进系数采用常规表达方式,此处不再赘述。CRP的敞水效率η0C为

式中:nF为螺旋桨转速;TF为螺旋桨的推力;QF为螺旋桨的转矩;TA为吊舱桨的推力;QA为吊舱桨的转矩;R为舱体与支架的力。
2.2 数值结果
将文献[12]的MAU型系列图谱的试验结果与单独螺旋桨敞水性征数值结果和试验结果进行对比,结果如图4所示,吊舱推进器敞水性征数值结果如图5所示。图中:KTF,KTA分别为单独螺旋桨、吊舱桨的推力系数;KQF,KQA分别为单独螺旋桨、吊舱桨的转矩系数;η0F,η0A分别为单独螺旋桨、吊舱桨的敞水效率;KT,KQ,η0为文献[12]的试验结果。

图4 螺旋桨敞水性征曲线Fig.4 Open water characteristic curves of propeller

图5 吊舱推进器敞水性征曲线Fig.5 Open water characteristic curves of pod
由图4可以看出,当进速系数J≤0.7时,KTF,KQF,η0F的数值结果与试验结果间误差在7.35%以内;当J>0.7时,误差变大,最大误差为9.89%。经过分析,在数值计算时,桨叶推力的剪切力部分直接由各个单元分量叠加而得,压力项部分由叶面、叶背压力作差求得。随着进速系数的增大,压力项逐渐占主导地位,压力项部分两较大值作差时会产生较大的相对误差。该较大的进速系数通常偏离了螺旋桨设计工况,计算结果基本满足工程应用要求。
CRP的敞水性征数值结果如图6所示。图中:KTFC,KTAC分别为CRP前、后桨推力系数,KQFC,KQAC分别为CRP前、后桨转矩系数,η0FC,η0AC分别为CRP前、后桨敞水效率。

图6 CRP敞水性征曲线Fig.6 Open water characteristic curves of contra-rotating propeller
由图6可以看出,CRP的KTFC,KQFC,η0FC均随J的增大而缓慢增大;CRP的KTAC,KQAC随J的增大而减小,敞水效率在J=0.65附近达到峰值;在不同的J值下,CRP的总效率均大于后桨效率而小于前桨效率,在J=0.734附近达到峰值。
2.3 水动力性能对比
为了对比CRP中螺旋桨和吊舱推进器相对于单独工作时的水动力性征差异,分别绘制了不同推进器推力系数、转矩系数和敞水效率的对比图(图7~图9),其中,图7为CRP前桨与单独螺旋桨的对比,图8为CRP后桨与单独吊舱推进器的对比,图9为3种推进器的敞水效率对比。

图7 螺旋桨敞水性能对比Fig.7 Comparison of propeller open water performance

图8 吊舱推进器敞水性能对比Fig.8 Comparison of pod open water performance

图9 各推进器的敞水效率对比Fig.9 Comparison of open water efficiency of different kinds of propellers
由图7可知,CRP的KTFC,KQFC,η0FC均随进速系数的增大而增大。由于J较小(后桨转速较大)时,后桨对前桨流场产生了较强的抽吸作用而使CRP中前桨效率较低;随着J的增大(后桨转速减小),后桨对前桨流场的抽吸作用逐渐减弱,导致CRP中KTFC增大,η0FC也随J的增大而增大;和单独敞水桨相比,前桨效率较高的工况对应的J增大,表现出与单独螺旋桨不同的变化趋势。
由图8可知,当J在0.5附近时,CRP的KTAC,KQAC,η0AC基本与单独吊舱推进器相等,随着J的增大,CRP的KTAC,KQAC,η0AC均小于单独吊舱推进器,且差值越来越大。这是由于随着J的增大(后桨转速减小),KTAC减小,由吊舱和桨毂的阻塞效应产生的阻力在推力成分中的比例增大,且CRP后桨处于前桨尾流中,前桨导致的非定常诱导速度会使KTAC减小,导致CRP的KTAC,KQAC,η0AC相对于单独吊舱推进器均呈现不同程度的降低。
由图9可知,在所计算的工况范围内,η0C始终低于单独螺旋桨;当J<0.7时,η0C高于单独吊舱推进器,当J>0.7时,η0C低于单独吊舱推进器。经分析,认为本文选取的前、后桨参数在CRP中并非较优的参数组合,该CRP未能体现出利用前桨尾流旋转能量提高效率的优势。
2.4 流场分析
图10为J=0.6时,CRP中的前桨与单独螺旋桨叶面(左)、叶背(右)压力系数Cp分布图。图中高压区与低压区的分布规律和变化趋势较相似,但CRP前桨的最大压力系数低于单独螺旋桨,最小压力系数高于单独螺旋桨。分析认为,在该进速系数工况下,CRP后桨对前桨叶面附近流体的抽吸作用较强,导致CRP螺旋桨叶面的最大压力系数低于单独螺旋桨;CRP前方的流体向后流动以补充前桨附近区域,使前桨叶背压力系数有所增大,导致CRP螺旋桨叶背最小压力系数高于单独螺旋桨。

图10 螺旋桨叶面与叶背的压力系数Cp对比Fig.10 Comparison of propeller on Cpof front and back surface
图11为J=0.6时,CRP后桨与单独吊舱桨叶面、叶背压力系数Cp分布图。由图可以看出,叶面与叶背的压力分布规律仍大致相同,但CRP后桨的最大压力系数和最小压力系数均高于单独螺旋桨。这是由于CRP的后桨处于前桨旋转尾流内且旋转方向相反,前桨的右旋尾流产生向右的周向诱导速度使左旋的吊舱桨表面受压,CRP后桨压力系数整体高于单独吊舱桨。实际上,前桨尾流产生的向右的周向诱导速度会使后桨水动力螺距角减小,攻角增大,轴向推力分量增大,这也是后桨吸收前桨旋转尾流从而提高CRP推进效率的根本原因。同时也可以看出,前桨产生的周向诱导速度对攻角的改变量会受到前桨转速、前桨直径等众多因素的影响,并且后桨攻角的大小和攻角变化量会直接影响后桨的升力系数以及推进效率,这种影响关系并非为正相关。因此,CRP通过前桨尾流能量的部分回收来提高CRP推进效率的目的在实际应用过程中并非一定能达到,需要进一步考虑前、后桨几何参数的匹配问题。对CRP提高效率的机理将在以后的研究中给出。
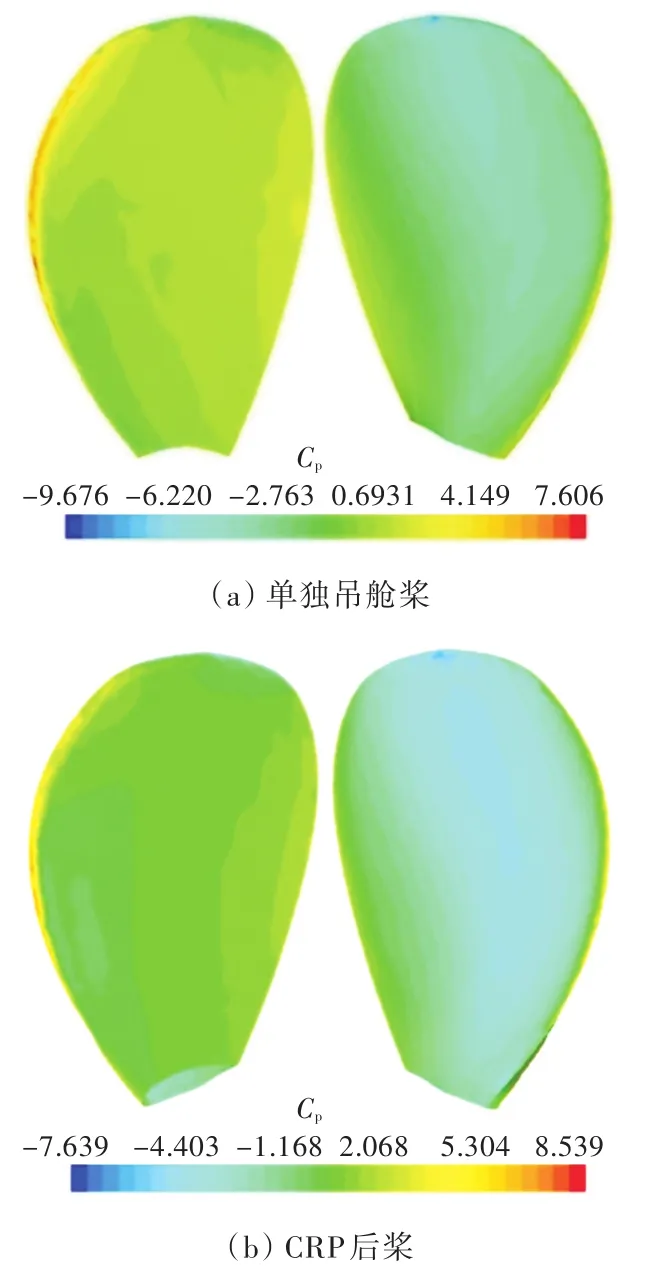
图11 吊舱桨叶面与叶背的压力系数Cp对比Fig.11 Comparison of pod on Cpof front and back surface
3 结 论
通过对CRP水动力性征数值进行研究分析,得出以下结论:
1)采用Cutcell网格和滑移网格方法所得的螺旋桨推力系数、转矩系数和敞水效率相对于试验结果的误差均在较小的范围内,表明了本文计算方法的合理性。
2)CRP后桨对前桨的抽吸作用随着J的增大(后桨转速的减小)而减弱,导致CRP的KTFC,KQFC,η0FC随J的增大而增大,效率较高的工况对应的J增大,表现出与单独螺旋桨不同的变化趋势;吊舱与桨毂的阻塞效应以及前桨非定常诱导速度对后桨的干扰作用,导致KTAC,KQAC,η0AC相对于单独吊舱推进器均呈现出不同程度的降低。
3)本文所计算的CRP的效率低于单独螺旋桨,未能体现后桨对前桨尾流的能量吸收作用,认为该CRP的参数并非推进性能较优的参数组合,故在CRP的设计研究工作中,需要进一步考虑前后桨几何参数的匹配问题,否则无法发挥CRP的高效节能优势。
猜你喜欢
科学大观园(2022年14期)2022-07-17
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2020年6期)2020-11-27
航空发动机(2020年3期)2020-07-24
当代陕西(2018年12期)2018-08-04
船舶与海洋工程(2018年2期)2018-05-16
中学科技(2017年10期)2017-11-04
航空模型(2016年10期)2017-05-09
科技创新导报(2016年31期)2017-03-30
