某型靶弹制导控制方法研究∗
2019-05-07 06:29杨锁昌
舰船电子工程 2019年4期
郑 旭 杨锁昌
(陆军工程大学石家庄校区 石家庄 050003)
1 引言
靶弹是防空武器系统在研制、定型、批抽检和鉴定过程中考核防空武器系统性能的一种常用靶标,能够模拟来袭导弹目标的外形尺寸、运动特性以及对抗特性等[1~2]。随着防空武器系统技术水平的提高,对靶弹性能的要求也越来越高。靶弹供靶弹道精度直接影响模拟目标弹道保真度和供靶安全性,是靶弹性能评价的重要指标之一[3]。靶弹供靶弹道精度直接受靶弹制导控制方法设计的影响。
本文针对某简易控制火箭弹改制靶弹需求,对其制导控制方法进行了研究,设计了以姿态角速度为阻尼回路反馈信息、以姿态角为控制回路反馈信息的姿态控制系统;采用程序控制与位置偏差反馈相结合的方法设计了靶弹方案弹道跟踪制导律;最后,利用半实物仿真试验方法对所设计制导控制系统进行了仿真验证。
2 总体控制方案
在某远程火箭弹基础上加装鸭舵和自动驾驶仪,用微波特性模拟舱取代原有战斗部,改制后靶弹结构主要包括:鸭舵、尾翼、微波特性模拟舱、控制舱、固体火箭发动机。靶弹采用了“×-×”气动布局,靶弹头部均匀布置4片梯形鸭舵,尾段均匀布置4片矩形尾翼,为解决鸭舵-尾翼滚转耦合现象,采用自由旋转尾翼的方式实现滚转解耦。由四片鸭舵的偏转实现俯仰、偏航和滚转通道姿态稳定控制和实现相应制导指令,旋转尾翼用于实现靶弹纵向气动静稳定控制。靶弹控制时序为:
1)无控段:从靶弹点火到靶弹出发射箱阶段,为保证靶弹顺利出箱该阶段不对靶弹进行控制。
2)初始姿控段:从靶弹出箱到发动机燃尽关机阶段,该阶段只进行姿态稳定控制,将滚转角和偏航角控制在0附近,俯仰角跟踪装订程序角。
3)制导飞行段:从发动机关机时刻开始姿态控制系统进行姿态角、姿态角速度控制,制导系统根据实际弹道与基准弹道偏差产生制导指令。
根据靶弹飞行任务需求,其制导控制系统要实现以下功能:
1)实现飞行姿态的稳定与控制;
2)根据方案飞行弹道产生控制指令;
3)跟踪控制指令实现方案弹道;
4)减小各种干扰因素造成的弹道偏差。
3 姿态控制系统方案设计
靶弹姿态控制系统主要作用是:稳定弹体在空间角位置或角速度;提高弹体绕质心运动的阻尼特性,改善制导系统的过渡过程品质;稳定靶弹静传递系数及动态特性;执行制导指令,操纵靶弹沿方案弹道飞行[4]。
由于该型靶弹为“×—×”型布局,气动外形为轴对称式,在飞行过程中滚转角速度为零。因此其姿态控制系统中俯仰通道和偏航通道和滚转通道三通道彼此解耦,可分别进行设计,并且俯仰通道与偏航通道完全相同。在姿态控制系统设计中仅需考虑其俯仰通道和滚转通道姿态控制系统设计。
在对靶弹制导控制系统进行设计时,为简化分析,只讨论速度偏量ΔV可忽略的短周期扰动运动。根据小扰动线性化方法,靶弹俯仰通道小扰动线性化模型为[5]

其中,φ为俯仰角,θ为弹道倾角,α为攻角,δz为俯仰舵偏角,Mgz、Fgz分别为干扰力矩和干扰力,aij为动力系数,具体计算方法参考文献[5]。
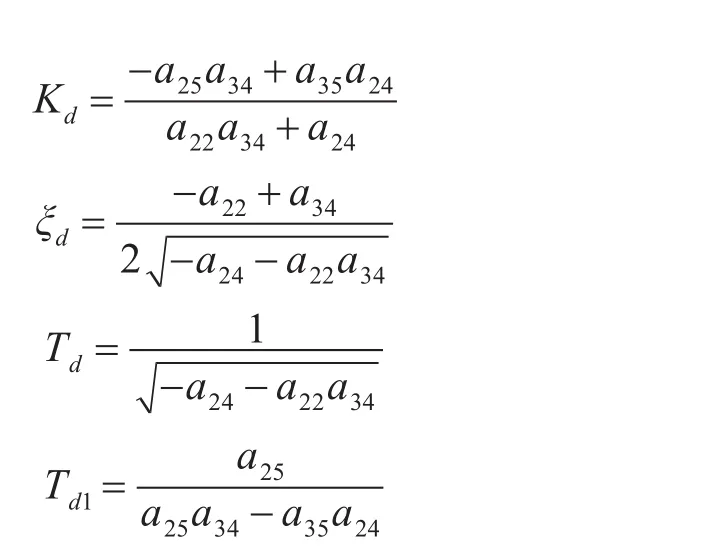
对式(1)进行拉普拉斯变换后可得靶弹纵向运动传递函数:

其中,Kd为弹体俯仰传递系数,Td、Td1分别为弹体时间常数和弹体气动力时间常数,ξd为弹体阻尼系数。
舵机传递函数可用一个二阶振荡环节表示,经扫频测试该靶弹采用的舵机传递函数可表示为

靶弹采用的惯性组件传递函数近似为

在靶弹俯仰通道姿态控制回路设计中,为改善弹体阻尼特性,在弹体姿态角反馈控制回路中,增加以弹体姿态角速率为反馈的阻尼回路。靶弹俯仰通道姿态控制回路结构如图1所示。
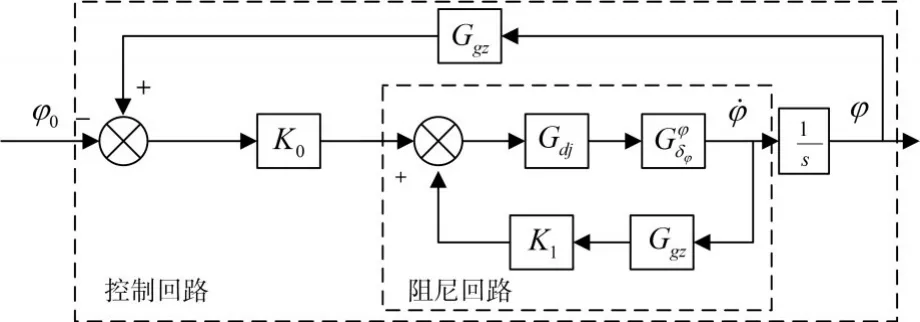
图1 俯仰通道姿态控制回路结构图
其中,φ0为俯仰角控制信号,φ̇为弹体俯仰角速度可直接由角速度陀螺测得,积分可得弹体俯仰角为以俯仰舵偏角为输入俯仰角为输出的弹体传递函数,K1和K0分别为阻尼和控制回路增益。
在计算阻尼回路增益K1时可暂不考虑校正网络以及惯性组件和舵机惯性,此时阻尼回路闭环传递函数为[6]
其中:
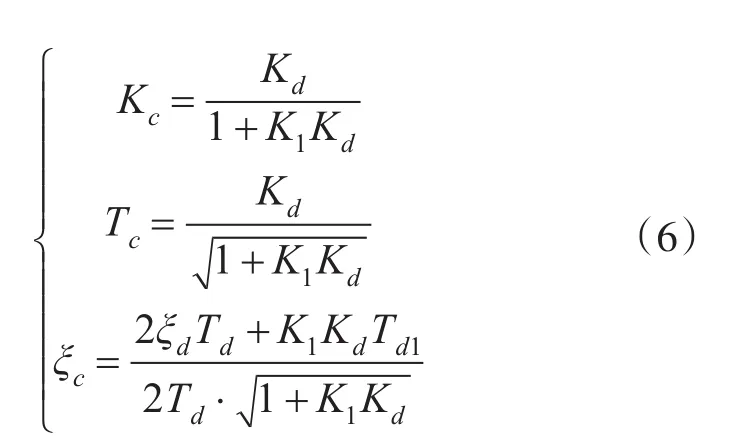
由参考文献[7]可知阻尼回路等效阻尼ξc≈0.7时,阻尼回路过渡过程最短,将其代入式(3)~(6)可计算阻尼回路增益K1。控制回路增益系数 K0可按式(3)~(7)进行估算,再进行调整[8]。

其中,a24为靶弹静稳定性系数,a25为靶升降舵效率系数。
以靶弹典型特征点为例,对该点处俯仰通道姿态控制回路进行设计。典型特征点处靶弹纵向运动传递函数为

由上述计算方法计算阻尼回路增益K1=-0.3,控制回路增益K0=-4.578。进而可得阻尼回路和弹体传递函数单位阶跃响应曲线如图2所示,俯仰通道姿态控制回路开环频率特性和单位阶跃相应曲线如图3、4所示。

图2 阻尼回路和弹体传递函数阶跃响应曲线
由图1可以看出,在单位阶跃激励下,阻尼回路与弹体传递函数具有相同的稳态响应值,相比于弹体传递函数,阻尼回路的超调量和调节时间更小,具有更好的动态特性。
由图3可以看出,所设计俯仰通道姿态控制回路幅值稳定裕度16.8 dB,相位稳定裕度为125 dB,系统具有较高的稳定裕度。由图4可以看出,在单位阶跃输入下,俯仰姿态角响应时间约为0.1 s。
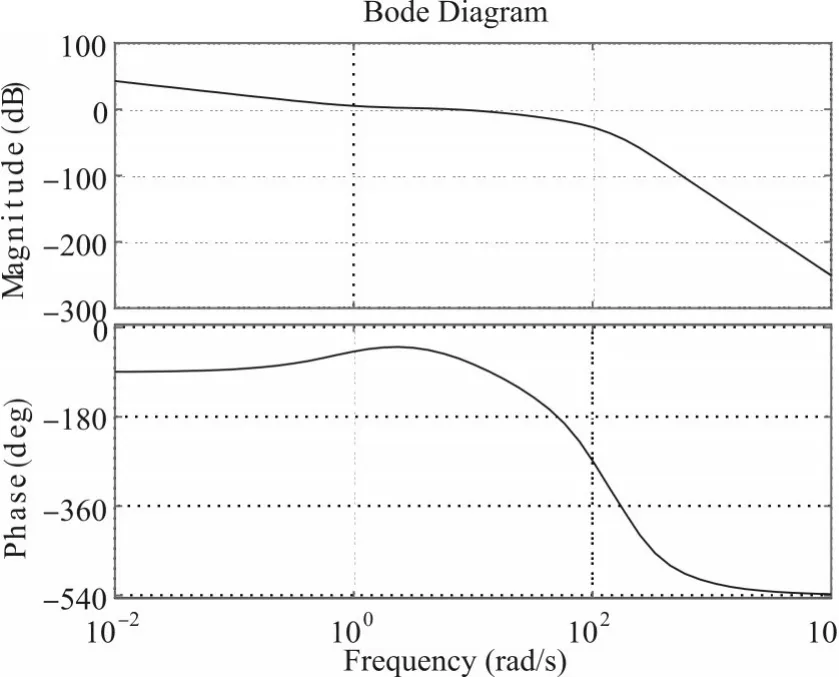
图3 俯仰通道姿态控制回路开环频率特性
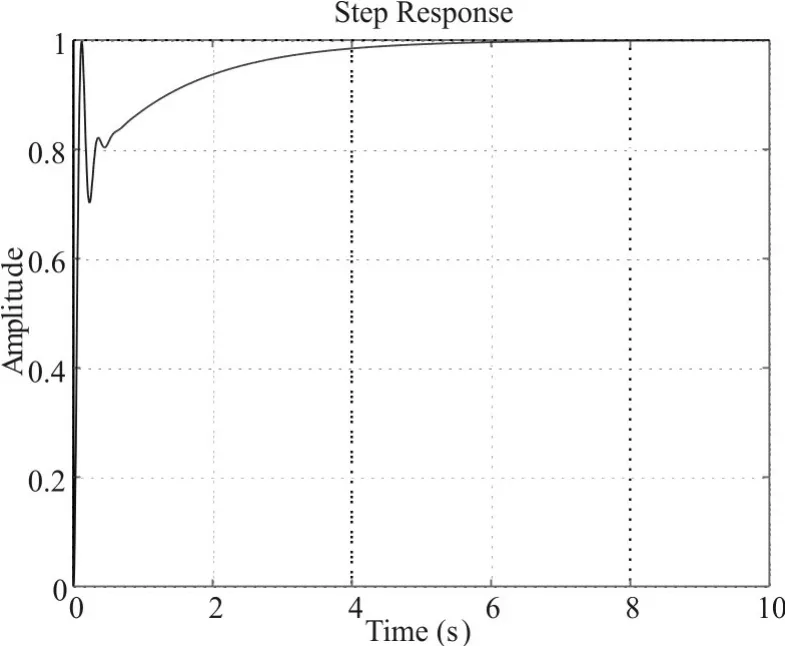
图4 俯仰通道姿态控制回路单位阶跃响应曲线
4 方案弹道跟踪制导律设计
采用程序控制加位置偏差反馈的方案弹道跟踪制导律,其基本原理为:以方案弹道为基准,在靶弹飞行过程中,根据组合导航系统解算靶弹实时位置信息,计算飞行弹道与方案弹道的实时位置偏差,通过制导回路产生姿态控制指令输入姿态控制系统,产生控制力和控制力矩,减小实际飞行弹道与方案弹道之间的偏差,实现对方案弹道的跟踪[9]。
以纵向通道制导控制为例,弹道跟踪制导结构如图5所示。
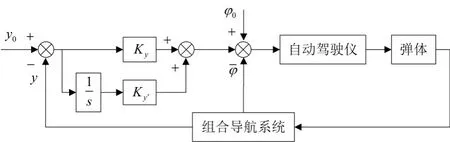
图5 弹道追踪法结构框图
设发射坐标系下实际弹道与方案弹道偏差为e→:

其中:x、y、z为靶弹飞行过程中组合导航系统解算得到的实际位置,x0、y0、z0为该时刻靶弹方案弹道位置,Δx、Δy、Δz分别为弹道偏差e→在x轴、y轴、z轴上的分量。
弹体坐标系下实际弹道与方案弹道之间的偏差为
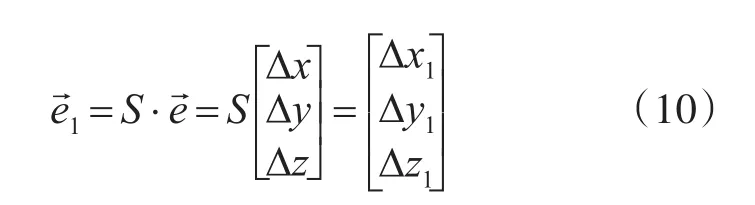
其中,S为发射坐标系与弹体坐标系间的转换矩阵。
该型靶弹采用发动机加速助推后无动力飞行的速度方案,其发动机参数已定。在对其制导律进行设计时,仅设计纵向和横向控制指令,弹体轴向不进行控制。因此可以靶弹射程X为自变量,采用线性插值方法获取理想弹道位置,与组合导航输出位置信息比较产生纵向和横向弹道偏差,进而产生纵向和横向控制指令[10]。
输入姿态控制系统俯仰、偏航通道的控制指令:
相比于传统单纯程序控制方法,采用程序控制加位置偏差反馈的靶弹制导方法使靶弹在飞行过程中始终处于闭环控制状态,能够根据靶弹实时位置调整靶弹飞行状态,减小各种干扰造成的飞行误差,提高靶弹模拟弹道精度。
5 仿真分析
为检验所设计靶弹制导控制方法的有效性以及其对启控位置偏差、气动偏差等干扰因素的鲁棒性,基于Matlab/Simulink软件建立靶弹六自由度运动模型,引入靶弹实际采用的惯性测量单元、舵机系统等实物,利用三轴转台、舵机负载模拟器等设备,采用半实物仿真方法对所设计靶弹制导控制方法进行了仿真验证[11~12]。
选取靶弹飞行方案弹道上的特征点,根据前文所提出的姿态控制系统参数计算方法,分别计算各特征点处俯仰通道阻尼、控制回路增益系数和滚转通道阻尼、控制回路增益系数,计算结果如表1所示。在靶弹飞行过程中,以飞行时间为自变量采用插值法计算整个飞行过程中的控制器参数。
仿真过程中,采用四阶龙格-库塔算法的数值积分法求解微分方程,弹道解算步长选择0.01 s,靶弹初始发射角θ0=60°,发动机推力P=6×104N,工作时间t=6.4s。靶弹供靶高度范围为下降阶段2.5km~20km,要求供靶段高度误差不超过100 m。
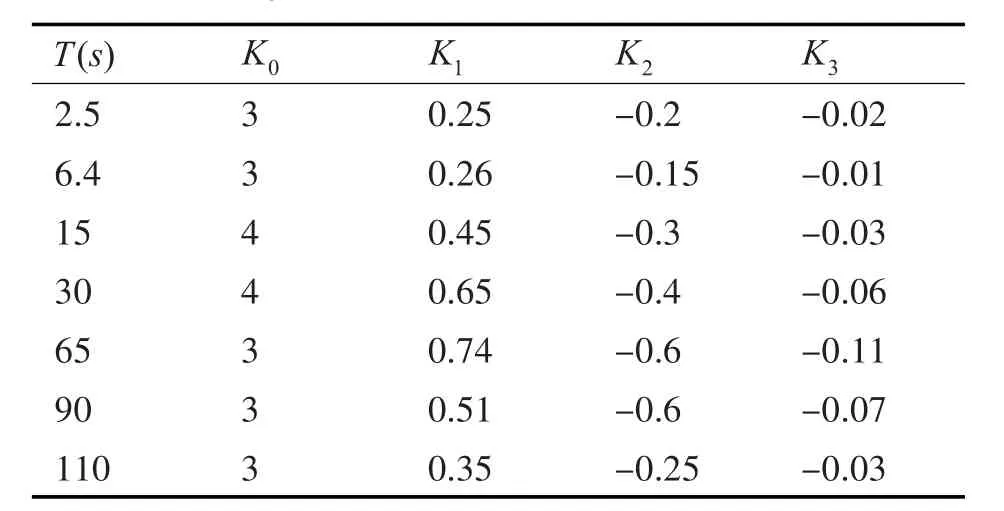
表1 弹道特征点处姿态控制系统增益系数
存在纵向初始位置偏差Δy=500 m和10%气动偏差,半实物仿真结果如图6~图9所示。
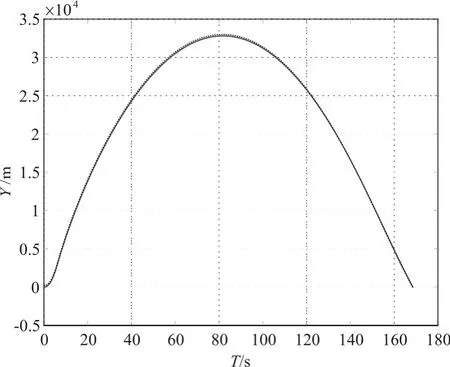
图6 纵向平面弹道曲线
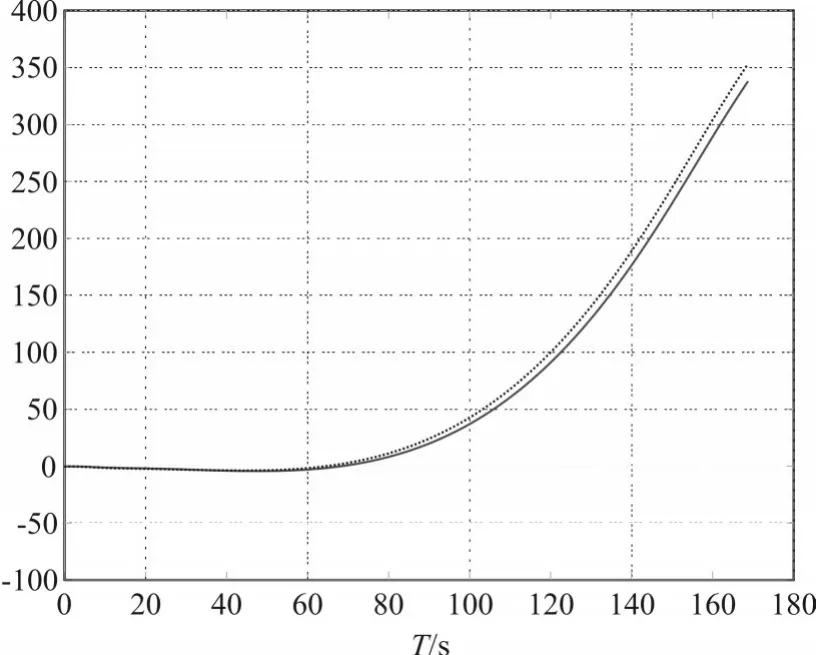
图7 横向平面弹道曲线
仿真结果表明,在存在初始位置偏差和气动偏差条件下,所设计靶弹制导控制方法能够有效实现对方案弹道的跟踪,供靶段实际飞行弹道与方案弹道最大高度偏差-98.5 m。在靶弹初始姿控段,靶弹姿态角跟踪程序姿态角,过载变化范围保持在较小范围。进入制导飞行段后,引入位置偏差反馈,过载随位置偏差的减小逐渐减小。
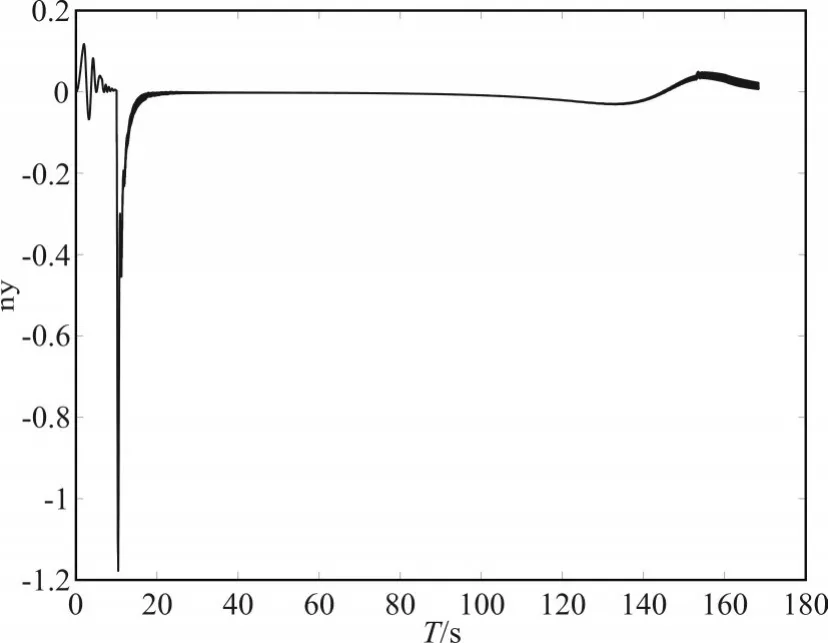
图8 纵向过载曲线
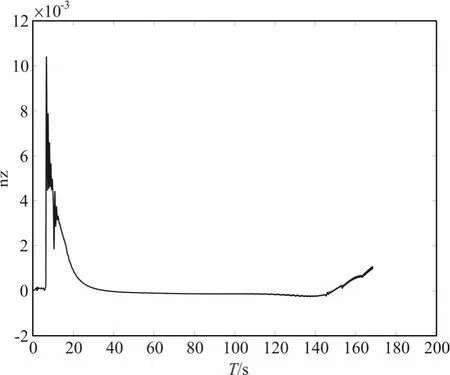
图9 横向过载曲线
6 结语
本文针对某型火箭弹改制靶弹任务需求,对其制导控制方法进行了设计。半实物仿真试验结果表明所设计靶弹制导控制系统能够有效抑制初始位置偏差和气动偏差造成的影响,具有较好的鲁棒性,弹道跟踪精度满足任务需求。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
兵器装备工程学报(2022年7期)2022-08-10
灌溉排水学报(2022年6期)2022-07-13
兵器装备工程学报(2022年4期)2022-05-09
爆炸与冲击(2022年2期)2022-03-17
兵工学报(2021年6期)2021-07-29
无线互联科技(2017年17期)2017-09-18
演艺科技(2017年1期)2017-03-09
软件导刊(2017年1期)2017-03-06
现代电子技术(2015年11期)2015-07-28