民用飞机迎角传感器布局气动分析
2019-05-08 11:58杨士普孙一峰
空气动力学学报 2019年2期
杨士普, 孙一峰, 方 阳, 杨 慧
(中国商飞上海飞机设计研究院, 上海 201210)
0 引 言
随着民机飞行控制技术的发展,迎角信号越来越多的被用于复杂的控制计算。因此,迎角信号对民机的飞行安全越来越重要。迎角信号在现代民机中主要用于高迎角保护设计[1-3],纵向增稳系统设计及大气数据系统的静压源误差修正设计[4-6]。波音737MAX8飞机于2018年10月29日在印度尼西亚以及于2019年3月10日在埃塞俄比亚的两次坠机事件与高迎角保护功能设计直接相关。
现代民用飞机通过安装在机身上的风标式迎角传感器测量飞机的机身迎角。图1显示了空客A320飞机迎角传感器的布局位置。风标式迎角传感器由风标、电位器及转轴组成(图2)[7]。风标在流场中会转动到顺气流方向的位置,电位器确定该位置与基准位置的夹角,从而测量风标所处空间位置的气流方向,即当地迎角。可以通过CFD模拟、风洞试验和试飞试验来确定迎角传感器的测量值(即当地迎角)与飞机机身迎角之间的关系,即迎角校线。迎角校线的特点决定了迎角信号的品质。
国内在军机的迎角传感器的布局安装及校准测量方面有较多的研究[8-14],而民机方面的相关研究较少[15]。在迎角传感器布局研究方面,文献[8]用理论方法研究了迎角传感器的最佳布局位置问题,文献[15]用CFD方法研究迎角传感器前方的突出物(总静压传感器)对迎角传感器的气流干扰问题。文献[8]通过简化的理论方法分析了旋成体模型表面的速度场,得出结论:将迎角传感器布置在旋成体半宽线上且压力系数Cp=0的位置,可使得当地迎角与机身迎角相等,即迎角校线斜率为1。由于物理模型过于简单,该结论与真实情况有较大差别,无法指导迎角传感器的布局设计。

图1 A320飞机迎角传感器布局Fig.1 Location of AOA sensor on A320 fuselage
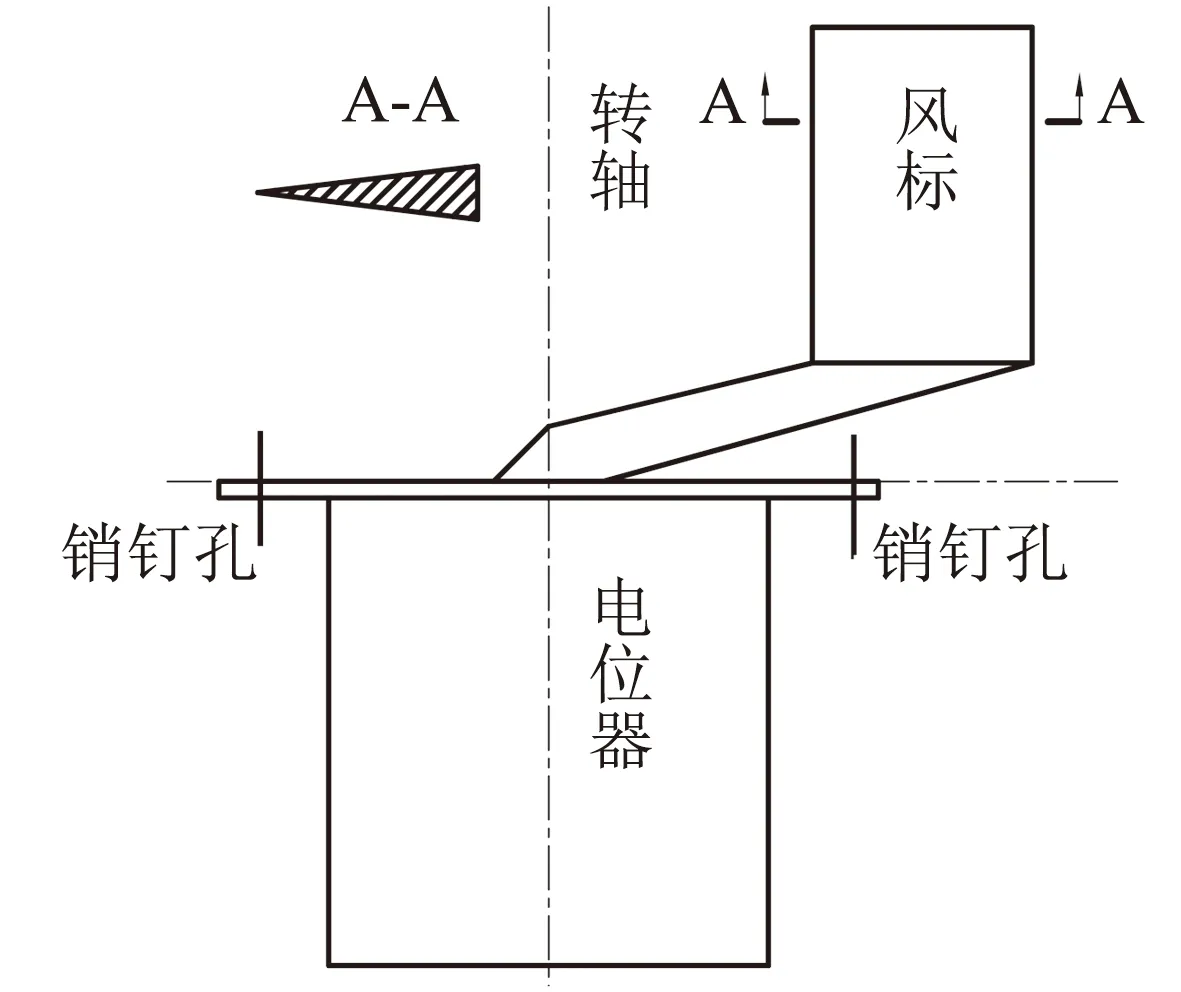
图2 迎角传感器示意图Fig.2 Schematic of AOA sensor
本文从民用飞机的迎角校线修正的角度,给出了迎角传感器布局设计的目标:使得迎角信号具有高鲁棒性及高信噪比的品质。以民用飞机为模型,运用空气动力学原理及CFD工具以定量的研究形式探索迎角传感器的最佳布局方式,为实际应用提供理论参考。
1 问题及机理描述
民用飞机的迎角传感器通常布局在机身侧面,风标旋转轴线与当地机身表面法线重合,利用传感器法兰上的两个定位销进行定位,一般定义风标处于水平位置时为传感器零位。定义风标转动偏离零位的角度为当地迎角αL,也即传感器的电位器读数。
由于风标会稳定在当地流线方向上,因此风标当地的流线方向决定了迎角传感器测量的当地迎角αL。图3给出了Ma=0.2,机身迎角αAC为1°及8°条件下机身流线图。从图3中可以看出,由于机身绕流的作用,机身表面各处的流线方向是不同的;随着机身迎角的变化,机身表面各处的流线方向会随之变化。因此,迎角传感器的布局研究在理论上可转化为研究机身不同位置的当地流线方向随机身迎角变化的特性。

(a) αAC=1°

(b) αAC=8°
迎角传感器测量的当地迎角αL与机身迎角αAC的函数关系f(αL,αAC)即飞机的迎角校线。对该函数关系有潜在影响的因素有:飞机侧滑角β、飞机构型(主要是襟缝翼位置及起落架位置)及地面效应。飞机机体振动及气流脉动使迎角信号存在信号噪声。
现代飞机要求迎角系统提供具有高鲁棒性及高信噪比的迎角信号。高鲁棒性要求在迎角传感器布局设计中体现为当地迎角随机身侧滑角变化不敏感。高信噪比要求在迎角传感器布局设计中体现为当地迎角随机身迎角变化敏感。
下文将以民用飞机为模型,运用空气动力学原理及CFD工具以定量的研究形式探索机身上当地迎角随机身侧滑角变化不敏感的区域,及当地迎角随机身迎角变化敏感的区域。
2 分析方法
2.1 当地迎角αL的模拟方法
假设迎角传感器安装在机身表面O点,则风标旋转轴线通过O点,且与机身表面过O点的切平面垂直,两个定位销孔的连线过O点,且与飞机构造水平面平行。根据迎角传感器的工作原理及安装特点定义当地圆柱坐标系(ρ,φ,z):O点为坐标原点;高度坐标轴z与风标旋转轴线重合;径向坐标轴ρ与两个定位销孔连线重合。
风标在流场中会转动到顺气流方向的位置,该位置取决于当地气流方向。风标高度一般约100 mm。在迎角传感器安装点O处,沿z轴方向,距机身表面0~100 mm之间的各点的气流速度方向差异很小。可取距机身表面70 mm处的空间点上的气流速度方向在当地圆柱坐标系中的方位角φ值,定义为当地迎角αL。这样构造的αL即迎角传感器的读数。
2.2 CFD方法
采用单独机身的构型进行研究,飞机其他部件对机头流场区域的速度场的影响可忽略。流场重点关注距机身表面200 mm以下的速度场的特性。采用非结构网格进行流场空间划分,近机身壁面流场区域采用棱柱网格用以模拟边界层流场结构以及提高当地沿壁面法线方向的空间分辨率。采用CFX软件进行计算,湍流模型采用SST模型。第一层网格的高度使得y+达到100量级,以便在CFX软件中采用壁面函数方法求解边界层流场。
研究工况范围取:雷诺数Re为2×107,马赫数Ma为0.2,机身迎角αAC取1°~ 8°,机身侧滑角β取-15°~ 15°。
在所研究的工况范围内,机头附近的流场为附着流。对目前的CFD计算技术而言,对简单外形的附着流流场的可信度较高。
2.3 数据处理
本研究的目的是研究机身不同区域αL对αAC与β的敏感程度。敏感程度通过云图形式呈现。
以绘制αL-αAC敏感性云图为例。通过变化αAC计算n个工况,得到机身某点的当地迎角数列{αL1,αL2,…,αLn},并定义ΔαL为该数列最大值与最小值之差。以ΔαL为变量绘制机身表面云图,在ΔαL较小的区域,说明αL随αAC变化不敏感;在ΔαL较大的区域,说明αL随αAC变化敏感。
3 分析结果
3.1 αL随αAC变化规律
计算工况:Re=2×107,Ma=0.2,αAC取1°~ 8°,β=0°。
图4展示了用CFD方法研究得到的当地迎角随机身迎角的变化规律。图4(a)中云图表示当地迎角随机身迎角变化的敏感程度,云图颜色越浅表征敏感程度越高。在机身最大半宽线附近,当地迎角随机身迎角变化最为敏感。图4(b)中曲线是图4(a)中A、B两个典型位置的迎角校线的对比。可以看到,A、B校线都呈现出良好的线性,位于机身最大半宽线附近的A校线比远离机身最大半宽线的B校线的斜率要大约30%。
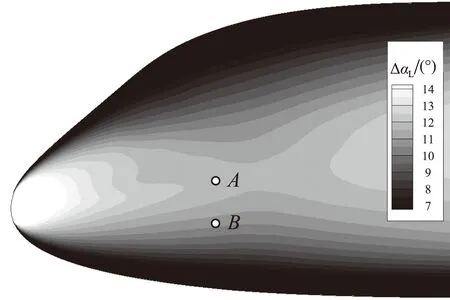
(a) 迎角校线敏感性云图
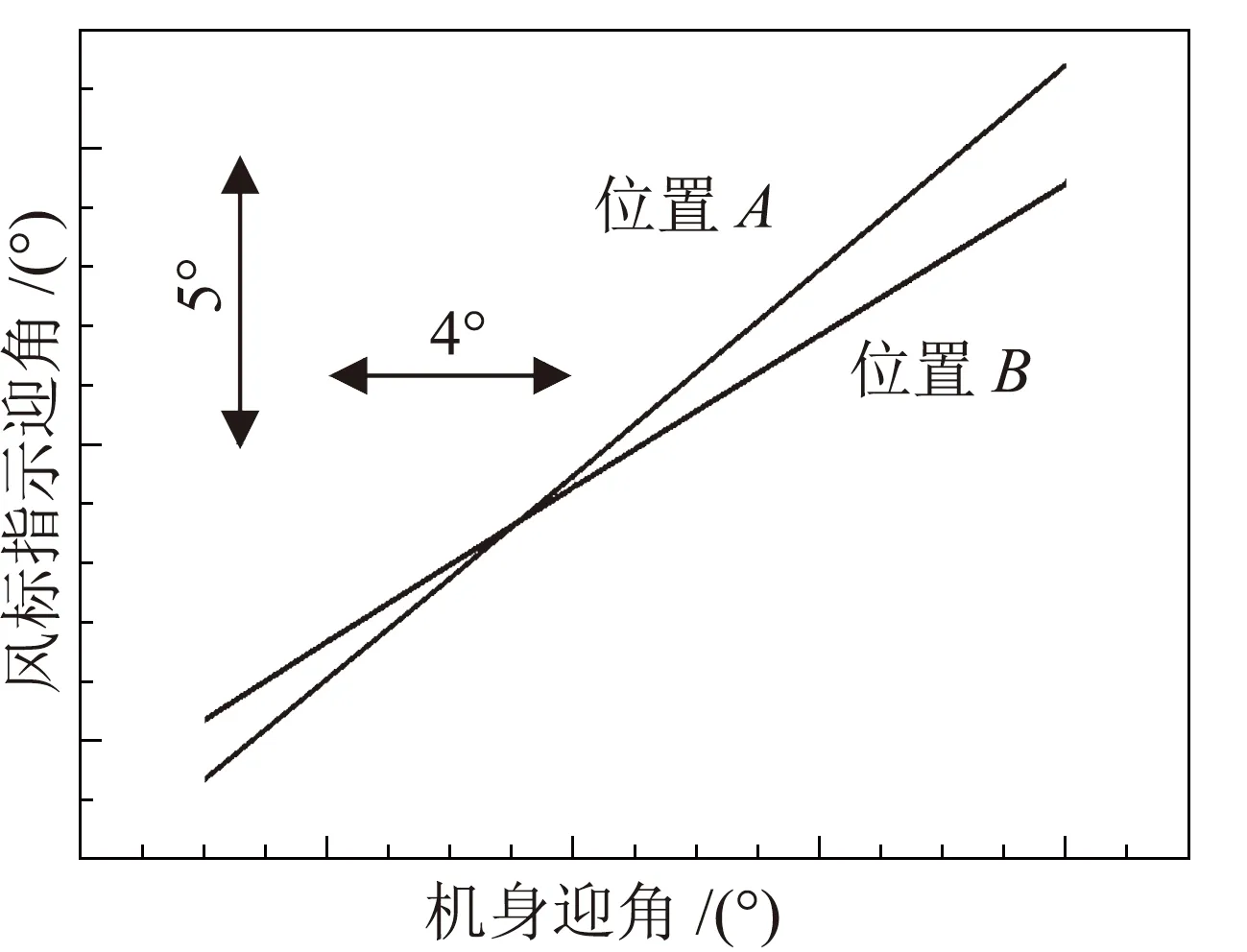
(b) 迎角校线
3.2 αL随β变化规律
计算工况:Re=2×107,Ma=0.2,αAC=0°,β取-15°~ 15°。
图5展示了用CFD方法研究得到的风标当地迎角随侧滑角的变化规律。图5(a)中云图表示当地迎角随侧滑角变化的敏感程度,云图颜色越浅表征敏感程度越低。在机身最大半宽线附近,当地迎角随侧滑角变化最不敏感。
图5(b)中曲线是图4(a)中C、D、E三个典型位置的当地迎角随机身侧滑角变化特性。C位置位于机身最大半宽线附近,其曲线表示当地迎角随侧滑角的变化不敏感,几乎可以忽略不计;而D、E位置的曲线表明,越远离机身最大半宽线,当地迎角受侧滑角的影响越大。
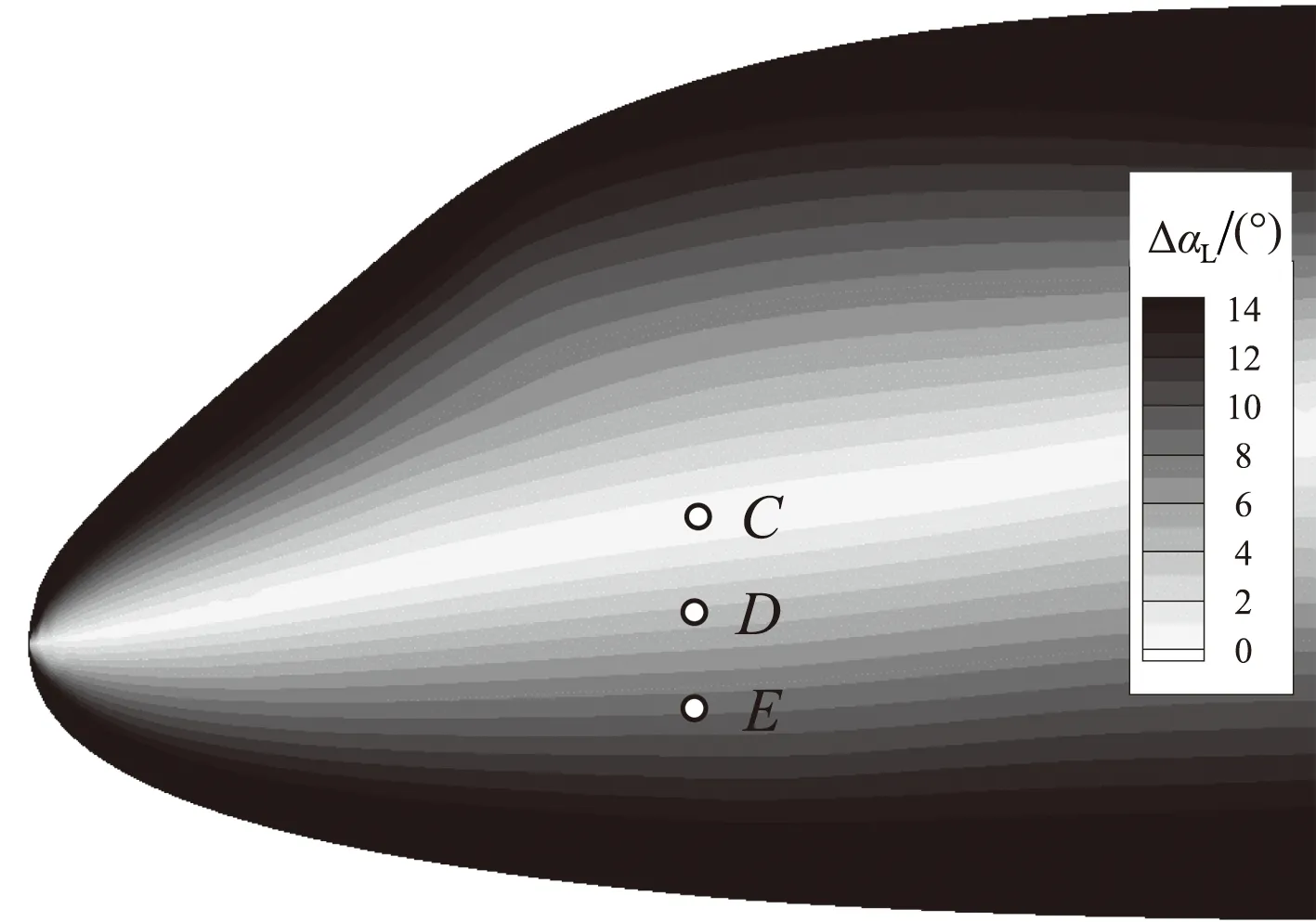
(a) 侧滑角对迎角测量影响云图

(b) 当地迎角随侧滑角的变化曲线
4 结 论
本文通过CFD方法研究了迎角传感器在机身不同位置时迎角校线随机身迎角及侧滑角的变化规律;获得了迎角校线随侧滑角变化不敏感的机身区域和随机身迎角变化敏感的机身区域,即在机身最大半宽线附近。
该研究方法和结果为民机迎角系统通过迎角传感器合理的布局设计获得高鲁棒性及高信噪比的迎角信号提供了一定的参考依据。
未来将通过试飞试验进行本方法与试飞结果的相关性研究。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
建材发展导向(2021年18期)2021-11-05
军民两用技术与产品(2021年7期)2021-10-13
北京航空航天大学学报(2021年6期)2021-07-20
西部论丛(2020年2期)2020-10-21
IT时代周刊(2015年7期)2015-11-11
智能制造(2015年9期)2015-10-15
中国医用工程与装备(2015年7期)2015-08-12
小天使·四年级语数英综合(2015年3期)2015-04-20
青年文摘·上半月(1992年1期)1992-01-01