
浅谈基于机器视觉和姿态检测的循迹智能车
2019-05-09 08:30刘云云
汽车与驾驶维修(维修版) 2019年4期
刘云云
(重庆电子工程职业学院 401331)
1 检测动态物体姿态的测量方法
当前,检查动态物体姿态的测量方法有2种:一种是利用检查动态物体的姿态传感器完成对被测智能车的各时刻的姿态测量,安装姿态测量传感器在被测动态物体内,也叫内侧法;另一种是利用外在设备检测被测智能车的各种实时数据,被称为外侧法或光学测量法。
内侧法可以分为基于惯性测量单元、GPS导航系统以及太阳方位传感器等多种测量方法。惯性测量法是没有依靠外界信号,采用惯性测量单元陀螺仪或加速度计等工具,来确定动态循迹智能车姿态参数的测量方法。这种方法优点是实时性比较高,缺点是由于转动部件装有陀螺仪,导致它的准备时长偏长,而且抗过载能力不够、造价偏高且体积偏大等。由于近年来,电子技术在我国取得了长足的进步,很多电子设备越来越小。因此,本次实验以主中央微控单元:STM32F103ZET6芯片作为核心主控。
GPS导航系统测量也是常用于运动物体的方法,具有可以缩减体积、便于携带、提高精度及价格低廉等特点。但是,它也存在缺点,室内不能使用它测量,只能用于室外,测量次数和频率偏低,GPS的信号对测试结果影响较大等缺点。所以,这种测量方法不适于与本次循迹智能车测试。
太阳方位传感器也是一种测量运动物体的方法,这种方法已经适用于弹箭飞行的姿态参数测试中,并且取得了很好的效果。但其不足是受到自然条件影响很大,而且安装繁琐,应用局限很大,只能用于旋转轴稳定的旋转体,因此本次实验同样不适用这种方法。
2 循迹智能车整体结构与设计与循迹智能车软件系统
2.1 智能车整体结构与设计
循迹智能车车体是以底盘组装基础,采用前轮转向结构和后轮驱动的结构。本次实验设计循迹智能车行驶在水平的KT板赛道上,仰俯角在合理范围内,在赛道有一段平稳过渡,所以本次实验需要将前轮支撑架稍微垫高,并且需要将底盘和后轮轴适当增大。这样做可以降低循迹智能车整体高度,从而降低重心提升循迹智能车运行时候的稳定性[1]。根据赛道情况把前轮调整了大约5°的主销后倾角,2°的前束角和内倾角。这样的设计有利于提高循迹智能车的平稳性能。
2.2 传感器的位置分布与安装
本次实验需要在摄像头底座安装舵机来控制摄像头的俯仰角,摄像头的俯仰角决定了照射距离和范围,所以摄像头的俯仰角在本次实验中很重要。并且需要把CCD摄像头设定选取在合适的位置,这样就能扩大采集横向路面信息角度范围,更有利于实现。
2.3 循迹智能车软件系统
软件是底层驱动,硬件为抽象层,上层运用算法函数、中层运用服务函数,结合适调试用人机相互处理组成。这种软件结构有利于传承技术的持续进步,已得到了良好的验证(图1)。
3 道路识别系统
3.1 道路识别系统和机器视觉系统
由于摄像头帧率可以达到很高,这就要求执行效率较高才能够处理。如图2所示为识别系统的黑白图片展示。
测试赛道标识线(黑胶带)贴在白色赛道板两侧,识别白色的区域,就可以区分出赛道。计算出道路行驶路径后,运用单目测距算法,还可以初步确定弯道和循迹智能车的距离与赛道弯道的转弯直径。
3.2 循迹智能车道路识别
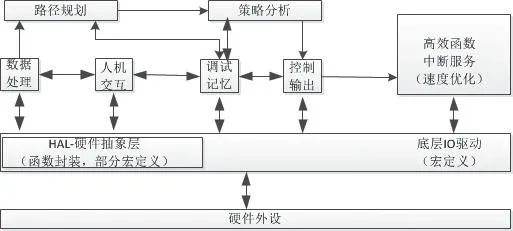
图1智能车软件分层设计结构

图2 道路识别系统识别的道路信息
通过多次的循迹智能车实验,还有相互对比实验结构以及现场状况,找出了引导线的特点。把其特点整理为数学模型,再比对特点信息,可以决定当前的策略应该适用哪一种速度和转弯的转向决定。而且循迹智能车的赛道设有起跑线和终点线,循迹智能车可以根据图像识别系统自动倒计时发车和停车。
3.3 循迹智能车姿态控制和闭环控制
可根据循迹智能车道路识别功能提取到的结果判断道路的类型,并通过根据目前循迹智能车运行状态和以前的运行状态,从而决定出应该的控制策略,然后再结合STM32F103ZET6芯片系统处理器生成速度和转弯角度的预期数值[2]。
4 优化控制系统
循迹智能车行驶过程中,摄像头可以获取道路信息,通过图像处理系统和道路识别系统、循迹智能车控制路途规划和生成策略、传感器反馈行驶信息优化修正以及合理输出控制等阶段。因此控制系统对于循迹智能车这个实验来说非常重要,要优化控制系统,以便于循迹智能车实验的成功。
4.1 循迹智能车对于赛道的识别以及优化控制
常见的循迹智能车道路类型有十字交叉赛道、大小S赛道、笔直赛道及大弯道等。如果定义大S赛道作为常规控制策略,小S赛道的驼机就是减少它的摆动幅度,让其反应变得迟钝,会出现近路通过的情况。但是大直道赛道作为加速是很好的时机,机器的PID比例会减少很多,这样可以减少循迹智能车高速行驶的时候车身摆动幅度,同时电机加速也是比较适合。连续的循迹智能车转弯或者大直道赛道,可以看更远的循迹智能车道路进入转弯预判提前加速,或者提前变换到赛道外侧,有利于通过转弯。
因为循迹智能车道路引导线是分布在循迹智能车的两侧,当循迹智能车通过类似于十字交叉这种路段的时候,有可能丢失赛道标识,导致失去控制。因此,如果发现某一段十字交叉赛道,就要提前锁定道路。因为如果赛道识别不足或者失败,循迹智能车就会失去控制,导致行盲通过赛道,直到可以识别出转弯特点的赛道时。
4.2 循迹智能车识别仰俯角和上下坡的赛道策略
循迹智能车在上坡路段的时候,仰角会发生很明显的增加与减少,还有明显的循迹智能车转动角速度。所以循迹智能车在加速或者减速等这些不是存在惯性系的时候,还是可以进行判断。
循迹智能车在上坡路段的时候,循迹智能车的摄像头向上扬起,导致循迹智能车的图像处理系统不能够识别上坡道。所以,在上坡时车辆识别系统采用的是近处的识别方式,使循迹智能车速度不变通过上坡。这种上坡赛道的路段和大直道赛道相差不大,可以按照大直道赛道时候的情况处理。当循迹智能车行驶到下坡路段的时候,相反的需要把下坡速度设置稍低一些,以免冲出道路。
4.3 循迹智能车防止侧翻
为了在弯道时能够稳定通过,在实验时可适当降低速度,并且当发现循迹智能车如果倾斜的时候,控制循迹智能车降速。
5 结束语
在多次循迹智能车的实验和总结中,通过对控制的多次优化,提高了循迹智能车的运行速度、平稳性以及控制水平。同时,在实验中,赛道摩擦力较大的时候,循迹智能车过弯速度太快也可能造成循迹智能车的翻车。通过改写相应的控制方法,保证循迹智能车通过弯道时的平稳性和安全性。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
计算机测量与控制(2021年6期)2021-06-30
学生天地(2020年3期)2020-08-25
电脑知识与技术(2017年5期)2017-04-08
无线互联科技(2015年6期)2016-03-05
诗选刊(2015年4期)2015-10-26
电影新作(2014年5期)2014-02-27
网络与信息(2009年6期)2009-07-31
网络与信息(2009年8期)2009-05-10
