
海洋一号C/D卫星在轨交叉定标设计
2019-05-10 08:58张可立张永超马越
航天器工程 2019年2期
张可立 张永超 马越
(1航天东方红卫星有限公司,北京 100094)(2北京空间机电研究所,北京 100094)
星载光学遥感器在轨长期运行过程中,由于受到空间环境影响以及自身探测器、光学系统膜层衰退影响,辐射特性会发生变化。为获取高辐射质量的遥感产品,需要定期对在轨光学载荷进行在轨辐射定标,及时更新定标系数。海洋一号(HY-1)C/D卫星是HY-1B卫星的后续星,其主要功能是针对全球大洋、近海近岸水体进行高精度、大范围探测,其搭载的水色水温扫描仪、紫外成像仪幅宽均达到了3000 km。在自然界中,水体表面反射率水平较低,以最大反射率波段绿光波段为例,一类水体反射率大都小于5%,而二类水体由于泥沙等悬浮物的影响,其反射率水平达到10%左右[1]。因此要获取准确、稳定的水色辐亮度信息,进而提升海洋水色遥感产品精度,必须保证载荷的辐射准确度。
目前通用的在轨定标方法主要包括载荷自主定标、地面定标场定标,以及多星交叉定标等方式[2-4]。针对海洋遥感卫星大幅宽、长期连续工作的特点,多星交叉定标方法无疑是首先要考虑的在轨定标方法。多星交叉定标方法是利用在轨多颗星长期观测结果,采用辐射定标精度较高的载荷为定标精度较低的载荷进行定标系数修正的方法[5-6]。国际和国内均采用过多星之间交叉定标方法,例如采用“土卫星”(TERRA)的中等分辨率成像光谱仪(MODIS)为“陆地卫星”(LANDSAT)的增强型专题制图仪(ETM+)和风云一号(FY-1)D卫星的载荷可见近红外辐射计(VIRR)进行交叉定标等[7-10]。然而,由于定标与被定标载荷轨道特性不同、分辨率不同、成像时间不同等因素,导致定标误差链较长,定标误差较大,只能作为载荷修正定标系数的参考。
为解决多星之间交叉定标方法的不足,为了保证星上海洋水色遥感仪器的在轨定标精度,首次提出HY-1 C/D卫星在同一卫星平台上配置一台星上定标光谱仪的设计方法,并将其作为整星其它载荷的辐射定标基准源,然后对同平台的水色水温扫描仪、紫外成像仪进行交叉定标。本文从工程实践角度进行了分析,结果表明HY-1 C/D卫星在轨同平台交叉定标设计可有效提升同平台不同光学遥感器之间的交叉定标精度,对后续同类型光学遥感卫星在轨定标具有重要参考意义。
1 交叉定标基本原理
交叉定标是利用定标精度较高的光学遥感器作为参考,对被定标光学遥感器进行定标。在交叉定标过程中主要考虑对参考光学遥感器与被定标光学遥感器进行光谱函数的匹配以及光照条件的匹配[2-4]。
卫星光学遥感器第i通道(i=1,2,…,n)的等效辐射度为
式中:L(λ)是光学遥感器入瞳处的光谱辐亮度,单位为 W/(m2·sr·μm);S i(λ)为遥感器第i通道的光谱响应函数,通道响应范围设为λ1和λ2,在这个范围之外的响应等于0。
与辐亮度一样,卫星高度的等效太阳辐照度可定义为

式中:ES(λ)是垂直于太阳入射光线平面上的大气外太阳辐照度,它通常是日地平均距离处的值。
遥感器A第i通道大气层顶(TOA)辐亮度及表观反射率关系可表示为

式中:EAS,i为日地平均距离处的遥感器A第i通道的等效太阳辐照度;d为真实的日地距离和日地平均距离的比值;θA为遥感器A过顶时的太阳天顶角;ρAi为遥感器A过顶时刻太阳天顶角θA下第i通道的表观反射率;LAi为遥感器A第i通道的表观光谱辐亮度,单位为W/(m2·sr·μm)。
假设参考遥感器为B的TOA辐亮度及反射率的定标系数是已知的,可以采用遥感器B的辐亮度或表观反射率来对遥感器A进行定标。遥感器A第i通道TOA辐亮度的交叉定标如下所示。

式中:DAi、DA0,i及aAi分别表示遥感器A第i通道的数字计数值、偏置量及定标系数;DBi、DB0,i及b i分别表示参考遥感器B第i通道的数字计数值、偏置量及定标系数为卫星过顶时太阳辐照度得是两个遥感器对应通道的光谱匹配因子,它是遥感器A、B归一化的表观反射率的比值,包括了两个遥感器对地物、大气的不同响应以及不同观测几何大气路径的匹配。
传统的交叉定标,往往采用不同轨道设置的卫星,在它们近同时观测区域进行交叉定标。这一过程往往会由于成像条件的不匹配,两不同卫星载荷谱段响应特性的差异、几何观测角度的不一致、大气路径的不同带来交叉的差异。为减少不同轨道、不同过境时间、不同几何观测条件带来的误差,HY-1 C/D卫星通过在星上配置具有绝对辐射定标能力的星上定标光谱仪来与被定标光学遥感器(水色水温扫描仪、紫外成像仪)进行交叉定标。的匹配因子,即光照条件的匹配,可以通过计算获
2 同平台交叉定标设计
HY-1 C/D卫星同平台交叉定标设计本质上是采用辐亮度基法。辐亮度基法要求定标器与目标遥感器在同时刻、同观测几何条件下对同一靶场进行成像,根据大气辐射传输特性,两遥感器可获得相同的入瞳光谱辐亮度。同时,该设计要求定标器与目标遥感器在中心波长位置、光谱响应函数等参数上尽可能接近,以减小两台遥感器辐亮度传递过程中的误差。
2.1 交叉定标设计特点
HY-1 C/D卫星同平台交叉定标设计具有以下特点。
(1)定标时效性:基于同一卫星平台,定标光谱仪在阳照区可以与水色仪、紫外成像仪同步成像,可以对每轨的数据都进行实时定标和校正,能够保证数据处理的连续性和稳定性;
(2)数据获取自主性:基于同一卫星平台,在轨定标不受其它平台遥感器限制,能够保证数据获取的自主性,从而保证业务化运行工作稳定开展;
(3)数据源丰富:基于同一卫星平台,可以获取不同地域、不同时相的成像数据,从而增加有效定标点数量,提高定标精度;
(4)几何观测误差消除:基于同一卫星平台,在保证载荷安装配准精度的条件下,可以有效消除由于两台遥感器的观测时间、观测区域、观测几何条件不同造成的误差,提高定标精度。
2.2 交叉定标设计过程
HY-1 C/D卫星同平台交叉定标设计过程如图1所示,具体过程描述如下。
(1)对于星上定标光谱仪,作为参考光学遥感器需要具备高精度的光谱定标及辐射定标能力。因此,星上定标光谱仪需要通过星上波长定标与太阳辐射定标分别获得光谱响应函数和定标系数;然后通过定标区图像及定标系数获得星上定标光谱仪的入瞳等效辐亮度序列;最后通过光谱响应函数和入瞳等效辐亮度序列获得星上定标光谱仪入瞳光谱辐亮度序列。
(2)对于水色水温扫描仪,作为被定标光学遥感器,需要星上定标光谱仪通过反卷积法提供连续入瞳光谱辐亮度。反卷积过程是利用光谱仪入瞳等效辐亮度和光谱仪光谱响应函数重构未知入瞳辐亮度,采用三次样条插值并累次迭代逐步逼近的方法进行计算[11]。具体计算过程如下,设

式中:L i,0为参考遥感器第i通道的入瞳光谱辐亮度;L0为参考遥感器的入瞳光谱辐亮度;L0(λ)为L0经过三次样条差值后得到的光谱间隔为1 nm的辐亮度,spline_interp()为三次样条插值函数,这里将光谱间隔为1 nm的辐亮度看作是准连续光谱的辐亮度。
第k次光谱响应插值结果为

式中:L ki为第k次光谱辐亮度插值结果;S i,0(λ)为参考遥感器第i通道的光谱响应函数;L k+1(λ)为L k+1经过三次样条差值后得到的光谱间隔为1 nm的辐亮度;系数a为常数,其取值范围为0.5~10,一般情况下将系数a设为1。利用与迭代处置的差值逐次减小误差,最终经过插值后得到1 nm光谱间隔的入瞳光谱辐亮度,作为连续光谱辐亮度。
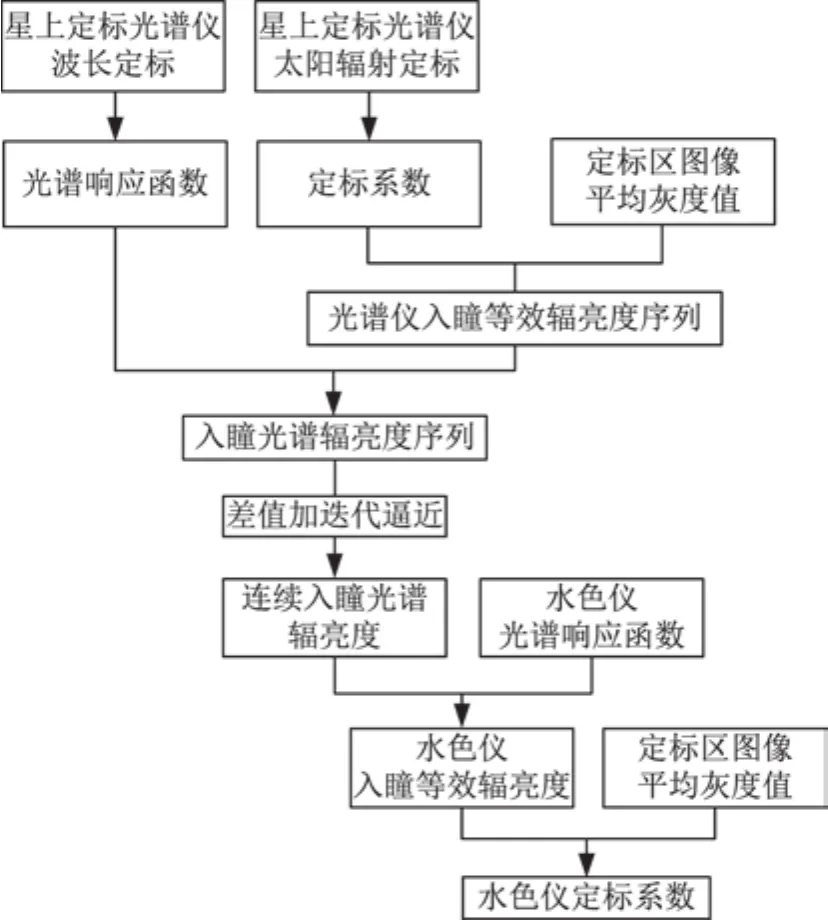
图1 同平台交叉定标设计过程示意图Fig.1 Design process for cross-calibration based on same platform
(3)在已知水色水温扫描仪光谱响应函数的情况下,可计算得到水色水温扫描仪的入瞳等效辐亮度和绝对辐射定标系数。在同平台、同视角、同时刻观测条件下,定标光谱仪和水色水温扫描仪的入瞳光谱辐亮度是相同的。在利用定标光谱仪得到连续光谱辐亮度后,将其与水色水温扫描仪归一化光谱响应函数按照式(1)进行计算,得到水色水温扫描仪相应谱段的入瞳等效辐亮度值。
(3)ES 提供了RESTful API,使用JSON 格式,提供了非常优秀的外部交互能力,使得搜索引擎能够支持多种文件类型的搜索。ES 项目提供了多种语言版本的客户端,包括Java、Python、.NET 和Groovy,提供了友好的二次开发平台。
(4)通过多次观测得到大量的交叉定标数据,利用这些辐亮度值与水色水温扫描仪相对应的响应值进行函数拟合,从而得到水色水温扫描仪绝对辐射定标系数,完成在轨同平台交叉定标。
3 星上定标光谱仪设计保证
由本文第2节同一卫星平台交叉定标设计可知,星上定标光谱仪作为参考光学遥感器,需要具备高光谱分辨率、星上太阳辐射定标与光谱定标,以及对地观测功能,星上定标光谱仪主体结构如图2所示。为实现HY-1 C/D卫星基于同一卫星平台交叉定标需求,星上定标光谱仪在载荷自身设计上需要保证满足以下条件。

图2 星上定标光谱仪结构示意图Fig.2 Outline diagram of the calibration spectrometer
(1)具备高光谱分辨率。采用光栅+面阵CCD设计,在400~900 nm范围内可获取光谱分辨率为5 nm的连续光谱图像信息。
(2)具备太阳定标功能。采用辐射定标漫反射板+波长定标板+参考漫反射板+暗电流板的在轨定标方式,实现在轨全口径、全视场、全光路太阳定标。并通过暗电流板对成像过程中采集的数据进行暗电流校正;通过参考板对定标板的衰减进行在轨校正;通过波长板对光谱仪的波长漂移进行校正。
(3)具备对地观测功能。为与水色仪、紫外成像仪等载荷3000 km幅宽相匹配,采用一维指向机构实现对地±30°范围内特定区域的选择观测,提高与被定标载荷交叉定标的灵活性。
在进行星上太阳定标时机选择时,主要考虑定标光谱仪太阳入射角度的变化情况,同时还要满足对日定标时星下点在阴影区内,保证地面杂散光对太阳定标影响降至最低。结合国外MODIS等卫星载荷定标设计和HY-1 C/D卫星轨道,确定将卫星过南北极极区且地面处于阴影区的飞行弧段作为在轨对日定标弧段,如图3所示。

图3 在轨太阳定标区域示意图Fig.3 On orbit calibration area for solar calibration
4 同平台交叉定标精度分析
根据交叉定标基本原理,针对HY-1C/D卫星在轨同平台交叉定标设计,影响交叉定标精度的因素主要包括:参考遥感器绝对定标误差、观测匹配误差、目标遥感器相对定标误差和其他因素引起的误差,如图4所示。
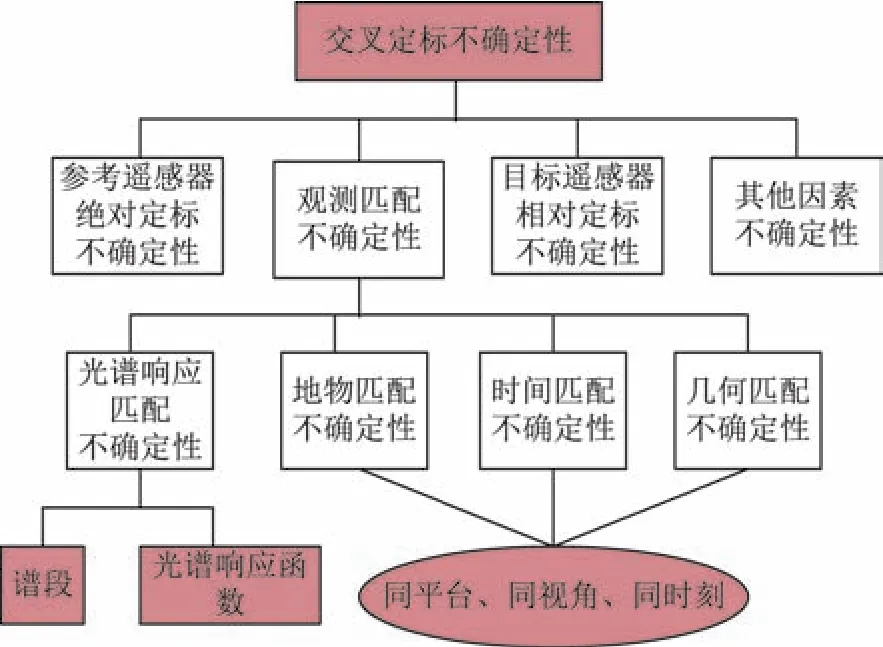
图4 HY-1 C/D卫星交叉定标误差影响因素Fig.4 Influencing factors of cross-calibration for HY-1 C/D satellite
1)参考遥感器绝对定标精度

表1 星上定标光谱仪在轨绝对辐射定标精度分析Table 1 Accuracy analysis of on-orbit absolute radiometric calibration for spectrometer
2)轨道匹配、空间匹配、时间匹配、观测几何匹配误差
对于定标光谱仪与水色仪和紫外成像仪安装在同一平台上,星下点几何地面分辨率一致,成像时间能够精确计算,通过控制各相机的光轴安装指向精度在一定范围内,且这些误差部分为系统误差,可以通过测量和地面处理进行校正,而一些测量误差和随机误差将会难以消除。系统校正前后,各载荷间星下点像元中心距离如表2所示。
在进行交叉定标时,通常选择水质条件均一的大洋水体进行,在2个像元内,目标辐射条件几乎一样。通过上述分析可以看出,按照目前星上载荷安装几何位置关系和可能存在的误差,可以近似认为各交叉定标载荷间是在同一时刻(对某目标最大成像时间间隔相差0.6 s)、以相同观测角度对同一地区进行成像,观测几何即大气路径和大气参数可以认为完全一样,同时地表光谱特性也一样,则到达大气层顶相机入瞳处的能量也近似相同。因此,按照目前的整星总装能力、载荷光轴精度以及空间环境影响条件,同平台交叉定标设计可以将传统交叉定标时的时间不同步、几何条件不同步、地物匹配不同步带来的误差忽略。

表2 同平台各载荷间星下点像元中心距误差分析Table 2 Pixel central distance analysis for instruments based on same platform km
3)光谱响应误差
指由于谱段差异和光谱响应函数差异引起的光谱响应误差。考虑到两台仪器的光谱响应函数的中心波长、带宽无法完全一致,获取的定标因子误差最大可达到2%左右。因此,本文采用了光谱复原方法[11],首先获取[400,900]nm范围内5 nm连续光谱辐亮度,进一步通过反卷积方法获得连续光谱辐亮度,最终与已知被定标遥感器定标响应函数运算后得到入瞳辐亮度的算法。采用光谱复原方法,与同谱段定标方法相比,平均/最大误差可降低一个数量级,通道9(B9)误差最大,但不超过0.6%[12]。
4)待定标载荷相对定标误差
待定标载荷相对定标误差表征水色仪或紫外成像仪图像经过相对辐射校正后的非均匀特性,由于同平台遥感器定标只针对局部小区域进行绝对定标,如果以局部辐射定标结果代替全视场定标结果,绝对辐射定标精度将受被定标光谱仪非均匀校正精度的影响。水色仪非均匀性校正精度优于1%,紫外成像仪非均匀性校正精度优于2%。
5)其他因素引起的误差
其他因素引起的误差主要包括待定标遥感器的杂散光引入的误差、偏振灵敏度引入的误差、响应非线性引入的误差、响应稳定性引入的误差、量化误差以及定标算法的引入误差等。
综上所述,参考地面绝对定标精度误差传递过程,采用星上定标光谱仪进行同平台星上交叉定标的精度在可见近红外谱段为4.17%,紫外谱段为6.43%,如表3所示,相比于当前多星之间7%~9%的交叉定标精度水平有较大提升。

表3 同平台交叉定标精度分析Table 3 Accuracy analysis for cross-calibration based on same platform
5 结束语
本文提出了HY-1 C/D卫星同平台交叉定标设计,即采用在星上配置具有星上绝对辐射定标能力的定标光谱仪,针对同平台待定标载荷进行交叉定标。HY-1 C/D卫星同平台交叉定标设计不仅有效消除了传统的多星之间交叉定标方法由于不同轨道、不同时相下光谱匹配、几何观测等误差影响,而且有效保证了定标数据获取的自主性和时效性。后续海洋水色遥感卫星在进行同平台交叉定标时,需要注意的主要方面有:①在定标场地的选取上,尽量选择大面积均匀目标区域作为靶区,确保场地的均匀性;②定标区域最好位于星下点周围区域,尽量不要在图像边缘,而且要避开太阳耀斑的影响;③为提高定标稳定度也应增加定标点,因此需要获取多个靶区或者同一靶区多时段观测图像数据,即定标数据满足多时相性。
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
航天器工程(2022年3期)2022-07-12
测绘地理信息(2022年3期)2022-06-05
今日农业(2021年19期)2022-01-12
小资CHIC!ELEGANCE(2021年28期)2021-08-18
雨花(2020年9期)2020-09-10
电脑报(2020年9期)2020-04-28
光学仪器(2017年2期)2017-06-14
科学大众(中学)(2016年11期)2016-12-29
中国扶贫(2015年15期)2015-08-10
