基于伞型和轮辐阵列的三维波束形成方法
2019-05-13 06:59
浙江工业大学学报 2019年3期
(浙江工业大学 特种装备制造与先进加工技术教育部/浙江省重点实验室,浙江 杭州 310014)
当前基于传声器阵列测量噪声源位置的方法主要是声强法[1]、近场声全息法[2]和波束形成法[3]。声强法主要用于稳态声源和静止声源的识别;近场声全息法采用传声器阵列对声源进行抵近测量,通过接收随距离增加而迅速衰减的倏逝波,获得较高的分辨率,因此该方法主要针对近场、中低频的声源识别定位[4];传统波束形成法基于将声信号进行延迟求和,加强真实声源方向的信号,减弱其他方向的干扰信号,形成空间指向性,它有效地弥补了近场声全息在高频和中、长距离的不足,同时其具有计算快、效率高和方便测量等优点[4-5]。目前基于平面传声器阵列的聚焦波束形成法在噪声源识别这一方向应用广泛[6],但对声源进行三维识别定位时,在阵列逆孔径方向存在伪声源,伪声源与真实声源关于阵列平面对称,且强度相同。也就是说采用平面阵列无法区分阵列前后面[6]。所以使用平面阵列测量时,测量结果易被干扰,降低了声源识别的精度。对此研究人员针对当前问题对三维传声器阵列开展了相关研究。杨洋等[7]设计了具有倾角的轮型三维传声器阵列,以典型最大旁瓣水平和波束形成声源识别成像图为依据,分析了不同倾角对其声源识别性能的影响。张金圈等[8]在传统平面网格阵列的基础上提出一种改进的三层立体分层网格阵列布局方法,并验证了基于该阵列的波束形成方法。周昌国等[9]针对星型立体传声器阵列利用粒子群优化算法对传声器进行优化设计,并通过仿真和实验得出波束形成成像图以评估其阵列性能。笔者引入了基于伞型三维传声器阵列[10]的三维声聚焦波束形成方法,通过三维声聚焦波束形成算法可以实现噪声源的三维坐标定位,确定噪声源的深度。利用伞型三维传声器阵列前倾结构的非对称性,突破传统平面传声器阵列的局限性,消除阵列逆孔径方向的伪声源,抑制阵列后方噪声。
基于球面波传播模型的三维声聚焦波束形成原理,通过仿真对比平面传声器阵列和伞形传声器阵列结合三维声聚焦波束形成方法对点声源识别定位的成像图以及主瓣宽度(HPBW)等,对阵列性能进行评价。在此基础上,在全消声室进行点声源的实验验证。实验结果验证了伞型三维阵列可以识别阵列前后面;当声源深度小于0.95 m时,伞型阵列可以达到B&K轮辐阵列的声源定位识别性能。
1 三维声聚焦波束形成方法
三维声聚焦波束形成方法基于延迟求和理论,对传声器接收的信息进行延迟、求和和输出,在空间中形成主瓣和旁瓣。
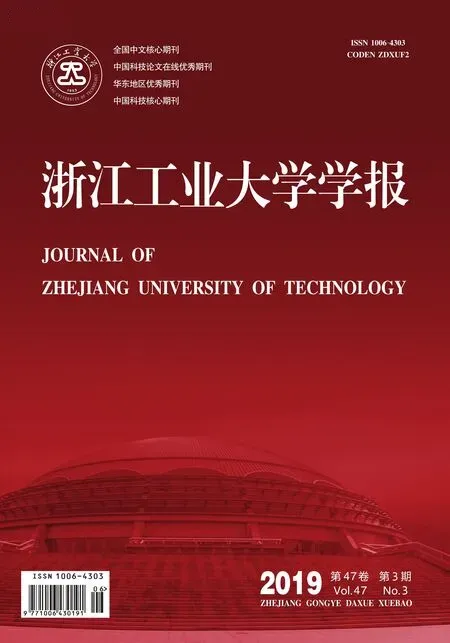
图1为基于球面波的三维声聚焦波束形成示意图。选择某一个空间参考点,以该参考点为坐标原点,M为传声器总数。图中虚线网格点为聚焦点,虚线网格面为聚焦平面,网格点为等距划分,聚焦空间任一聚焦点坐标为pijk=(xi,yj,zk),i=1,2,…,M,j=1,2,…,J,k=1,2,…,K。i,j,k分别为聚焦空间X,Y,Z三个方向的序号。
图1 基于球面波的三维声聚焦波束形成声源识别原理示意图Fig.1 Principle of 3D beamforming sound source identification based on spherical wave
第m传声器接收到的声压信号为
(1)
将传声器接收到的声压信号反向聚焦到空间聚焦点,该聚焦点的波束形成输出为

(2)
式中:ωm为第m号传声器的加权系数,一般取1;|rf1|为聚焦点(xi,yj,zk)到参考点的距离;|rfm|为聚焦点到第m号传声器的距离。其中:
(3)
(4)
(5)
假设传声器阵列为平面传声器阵列,则平面传声器阵列满足zm=0,可得
B(xi,yj,zk,ω)=B(xi,yj,-zk,ω)
(6)
可见通过平面传声器阵列进行声源定位时,其关于X,Y平面对称的聚焦点的波束形成输出值大小相等,在声源深度方向存在前后模糊。
采用三维伞型传声器阵列时,各传声器在Z方向的坐标均不为0,它在聚焦点(xi,yj,zk)和(xi,yj,-zk)的波束形成输出不相等,说明伞型三维传声器阵列结合三维声聚焦波束形成方法可以识别声源前后位置。
2 数值仿真
2.1 仿真设置
基于三维声聚焦波束形成原理,用Matlab进行仿真。假设其聚焦空间为长方体,其边界分为-1 m≤xi≤1 m,-1 m≤yj≤1 m,-4 m≤zk≤4 m,X和Y轴方向的间距ΔX=ΔY=0.02 m,Z轴方向的间距ΔZ=0.25 m。坐标原点处放置轮辐阵列和伞型阵列。声源坐标分别为(0.04 m, -0.08 m, 1 m)和(0.04 m, -0.08 m, 2 m),声源频率为2 500,6 000 Hz。
2.2 仿真结果及分析
图2,3为单声源成像图,伞型阵列和轮辐阵列均使用27 个传声器。可见轮辐阵列的成像图存在两个关于X,Y平面对称的声源点,无法识别声源前后位置。伞型阵列具有不对称性,成像图只有一个声源。说明伞形阵列突破了平面阵列的局限性,能够区分阵列前侧和后侧的声源。
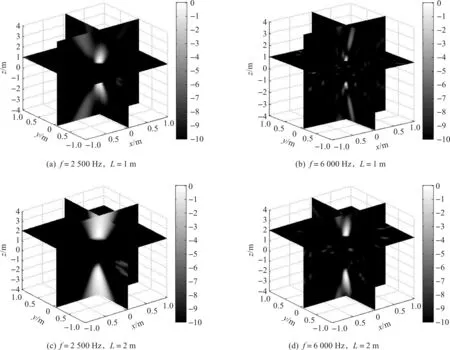
图2 单声源识别成像图(轮辐模拟数据)Fig.2 Sound source identification images for monopole source (simulated data of sector wheel array)
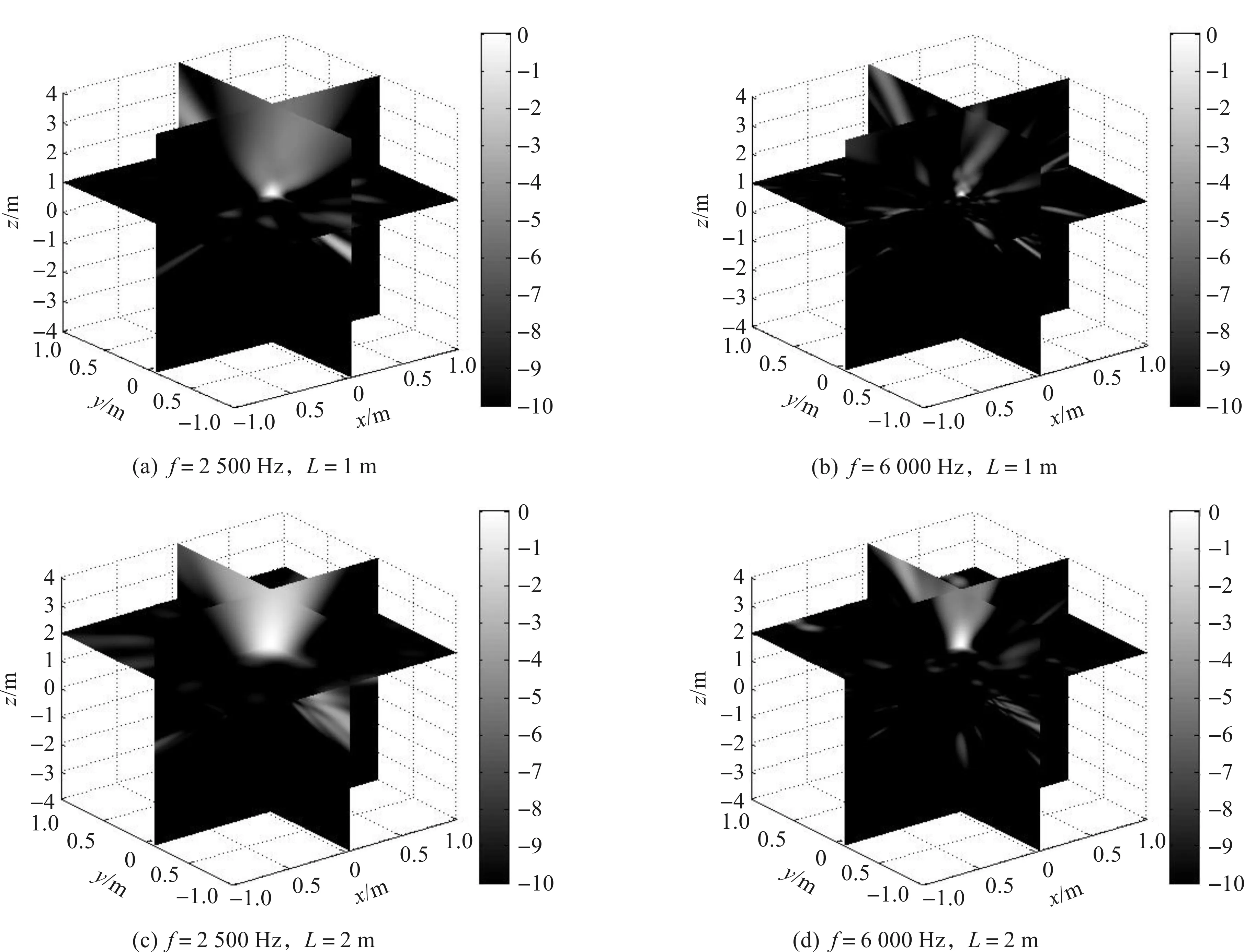
图3 单声源识别成像图(伞型模拟数据)Fig.3 Sound source identification images for monopole source (simulated data of umbrella array)
主瓣宽度的大小是衡量某个算法性能的标准之一,对比伞型和轮辐这两种阵列结合三维声聚焦波束形成方法的模拟,计算出主瓣宽度(HPBW)。通过对X轴和Y轴的主瓣宽度进行对比,结果如图4所示(UA表示Umbrella array,伞型阵列;SWA表示Sector wheel array,轮辐阵列)。其模拟的声源深度从0.5 m到2 m,间隔为0.25 m,横纵坐标均为0.04 m和-0.08 m。从图6中可知:伞型阵列在X方向的HPBW在深度较小时小于轮辐阵列,当深度大于0.95 m时,伞形阵列X方向的HPBW开始逐渐大于轮辐阵列。伞型阵列在Y方向的HPBW在深度较小时略大于轮辐阵列。说明伞型阵列在近距离的声源定位效果与轮辐阵列相当,可以达到成熟的轮辐阵列的声源识别水平。而当声源距离变大时,伞型阵列在X方向和Y方向均显现出较大的劣势。同时也论证了声源与传声器阵列的距离越远,其主瓣宽度越大,声源定位精度越差。在实际噪声源定位中,需要注意选择适当的传声器与声源的距离,保证其成像的精度。为研究不同阵列在X和Y方向的主瓣宽度的差异,定义i为阵列Y方向的主瓣相对于X方向主瓣的增加率,即
(7)
图5是在模拟情况下,伞型阵列和轮辐阵列的i值。轮辐阵列Y方向的主瓣相对于X方向主瓣的增加率在声源深度0.5 m到2 m之间基本保持在±5%的范围内,证明了B&K设计的轮辐阵列的成熟性,其X方向和Y方向的主瓣宽度基本相同。伞型阵列在Y方向的主瓣宽度随着声源深度的增加逐渐缩小了和X方向的主瓣宽度的差值,最终达到与轮辐阵列的水平,但在声源深度较小时,伞型阵列对Y方向的主瓣宽度控制较差。
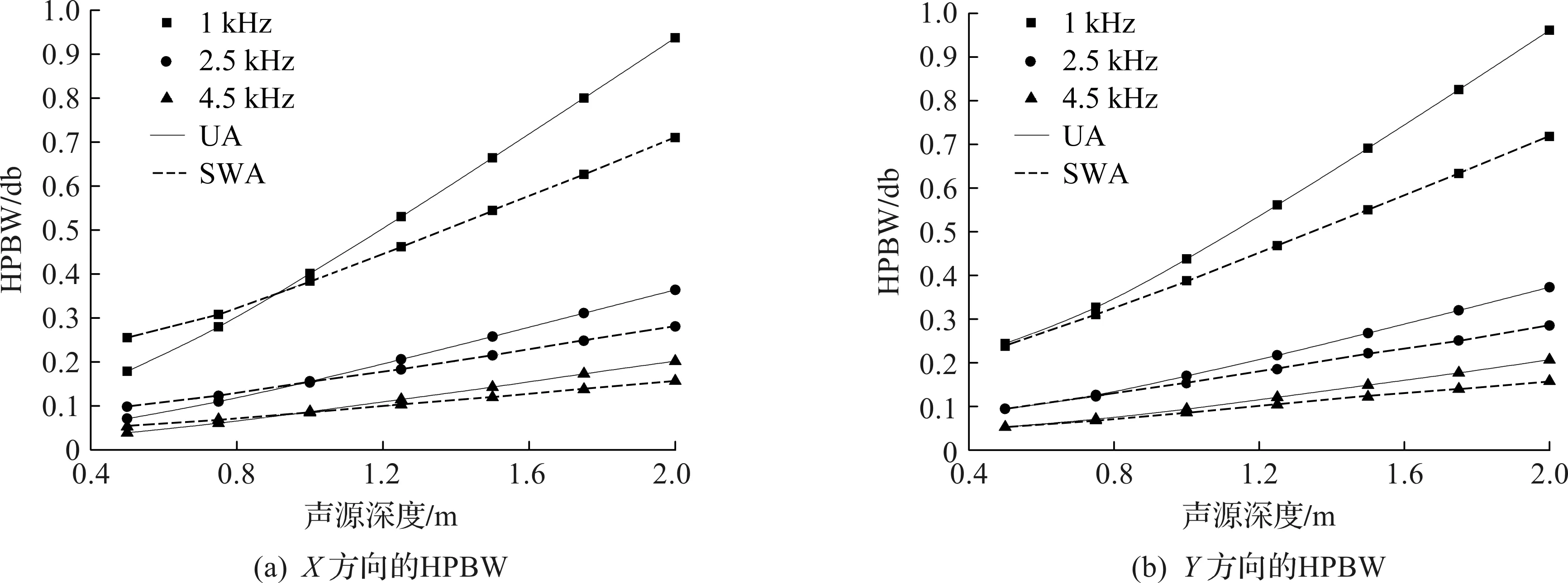
图4 X,Y方向的HPBW(仿真数据)Fig.4 HPBW in the direction of X and Y(simulated data)
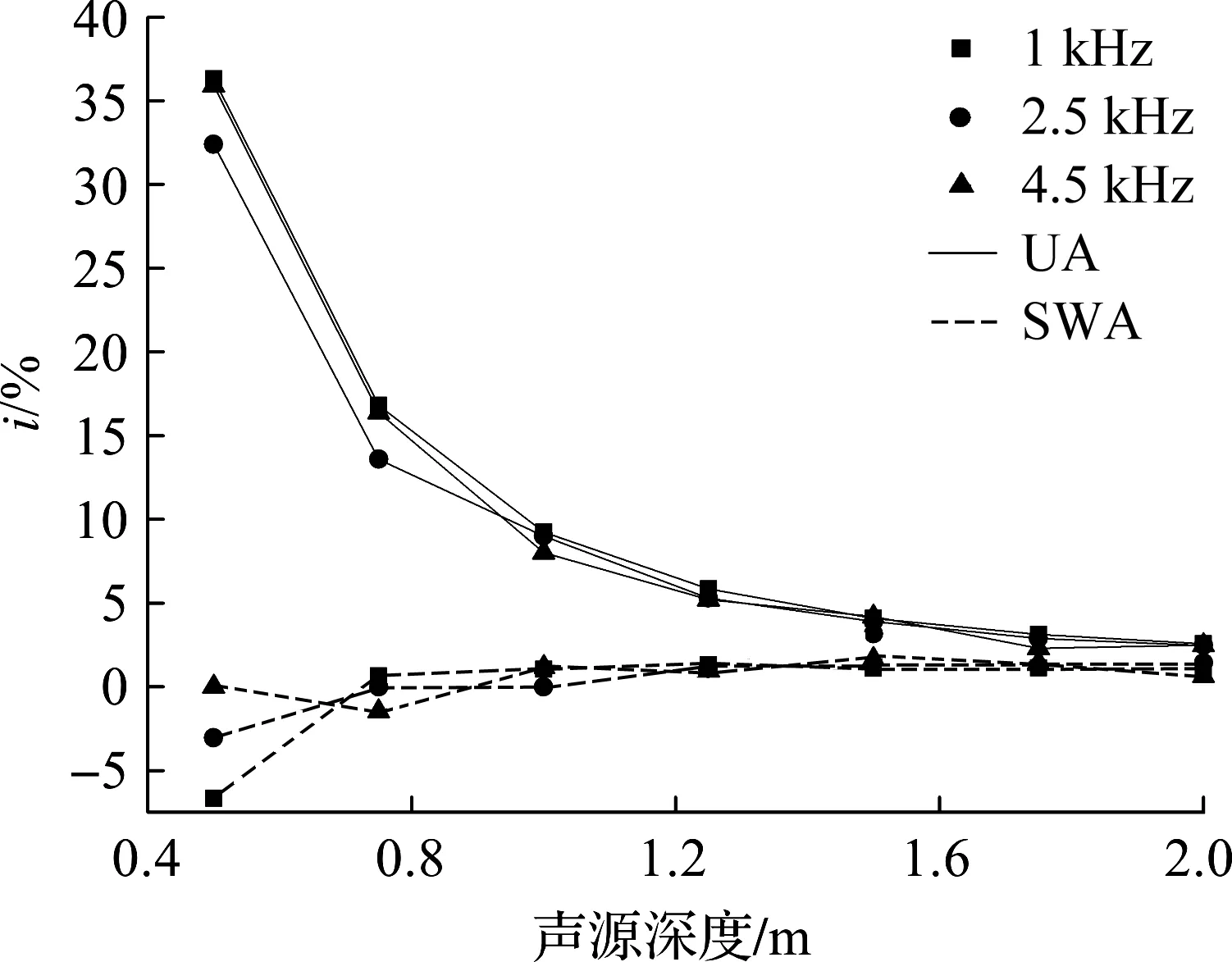
图5 伞型和轮辐阵列的主瓣增加率(仿真数据)Fig.5 HPBW increase rate of umbrella array and sector wheel array(simulated data)
3 实验分析
实验在3 m×3 m×3 m的全消声室内进行,图6为试验布置图。试验时采用的传声器阵列、声聚焦空间的参数设定均与仿真一致,声源目标为小型扬声器。图7,8为单声源成像图。与仿真结果一样,使用伞型阵列在深度方向能够区分阵列前侧和后侧的声源。
进一步对实验数据进行处理,得到2 种阵列在4 种深度下X和Y方向的主瓣宽度(HPBW),结果如图9所示。可以看出:实验结果基本印证了模拟结果,在深度小于0.95 m时,使用伞型阵列可以得到较小的主瓣宽度,当深度继续增大,伞型阵列在X,Y方向的主瓣宽度相对于轮辐阵列增加更快。图10为实验下伞型阵列和轮辐阵列在不同频率和声源深度下Y方向的主瓣相对于X方向主瓣的增加率。其结果与仿真基本一致,轮辐阵列Y方向的主瓣宽度相比于X方向的主瓣宽度的增加率基本稳定在±5%~±10%,说明了轮辐阵列在控制主瓣宽度方面比较优异。伞型阵列在声源深度较小时,X方向主瓣宽度小,而Y方向主瓣宽度较大。随着声源深度变大,Y方向的主瓣宽度得到控制,其增加率在±10%左右。
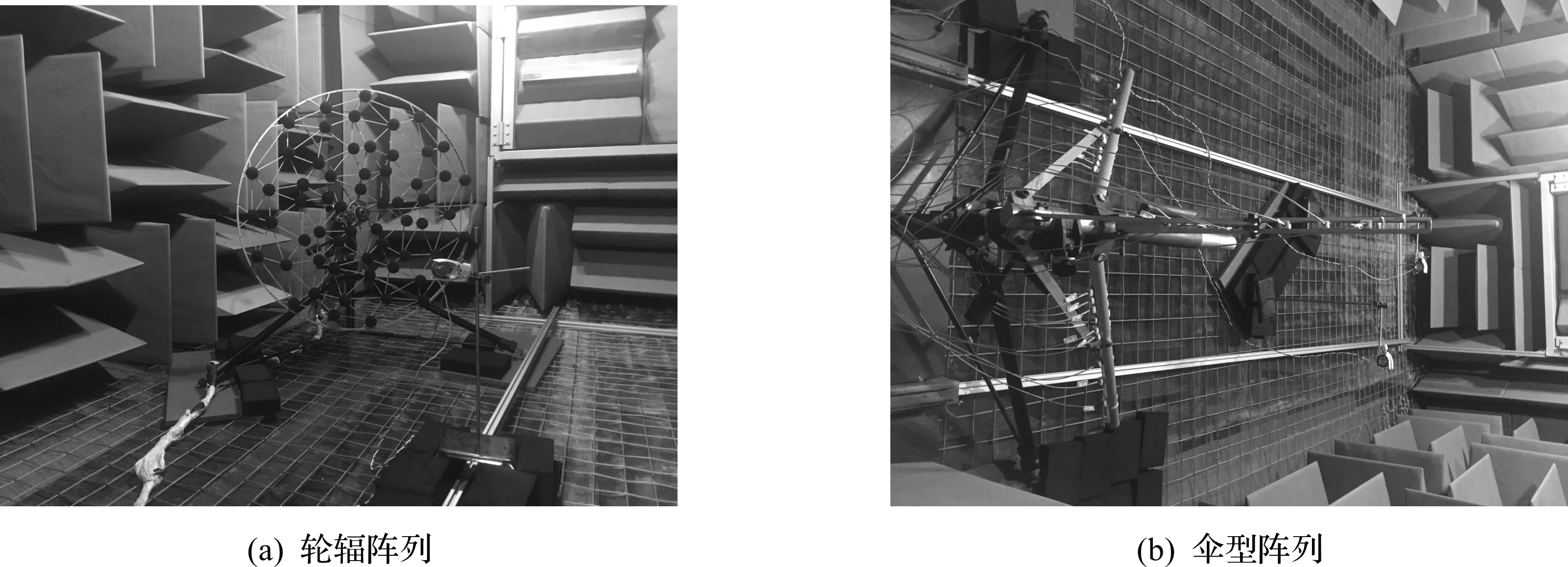
图6 试验布置图Fig.6 Experimental layout
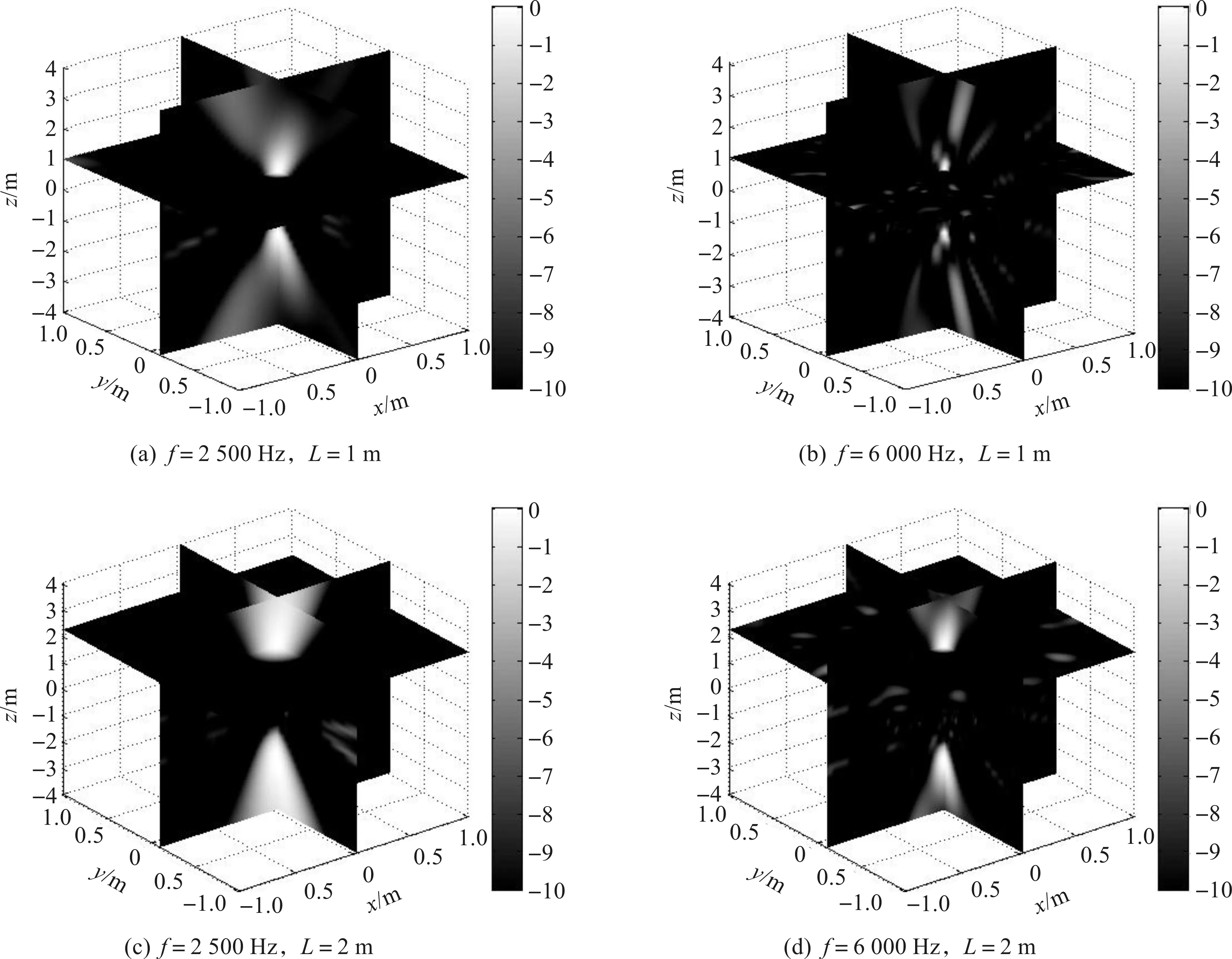
图7 单声源识别成像图(轮辐实验数据)Fig.7 Sound source identification images for monopole source (experimental data of sector wheel array)
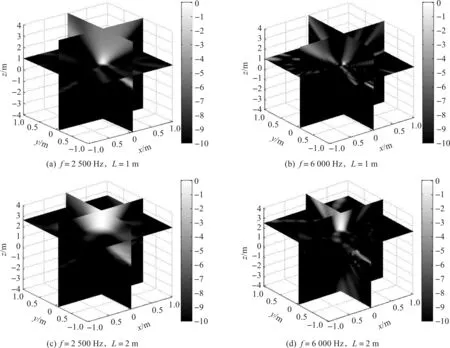
图8 单声源识别成像图(伞型实验数据)Fig.8 Sound source identification images for monopole source (experimental data of umbrella array)
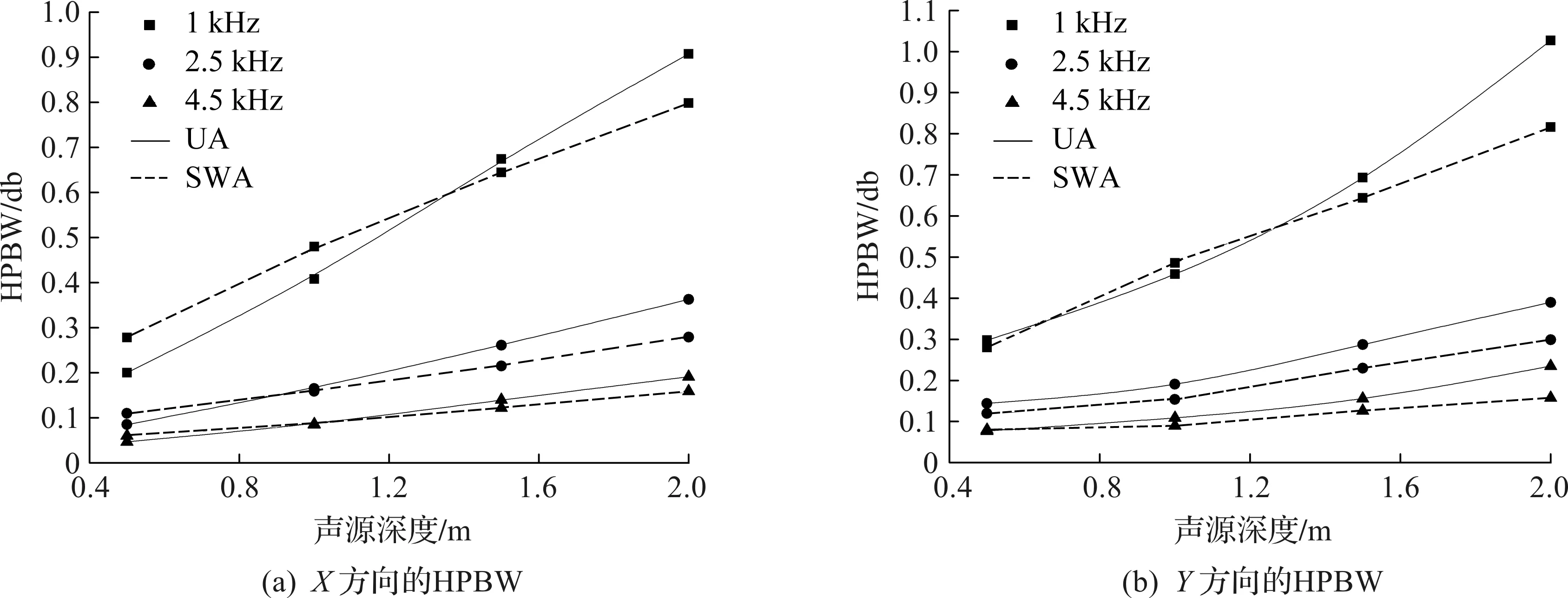
图9 X,Y方向的HPBW(实验数据)Fig.9 HPBW in the direction of X and Y(experimental data)
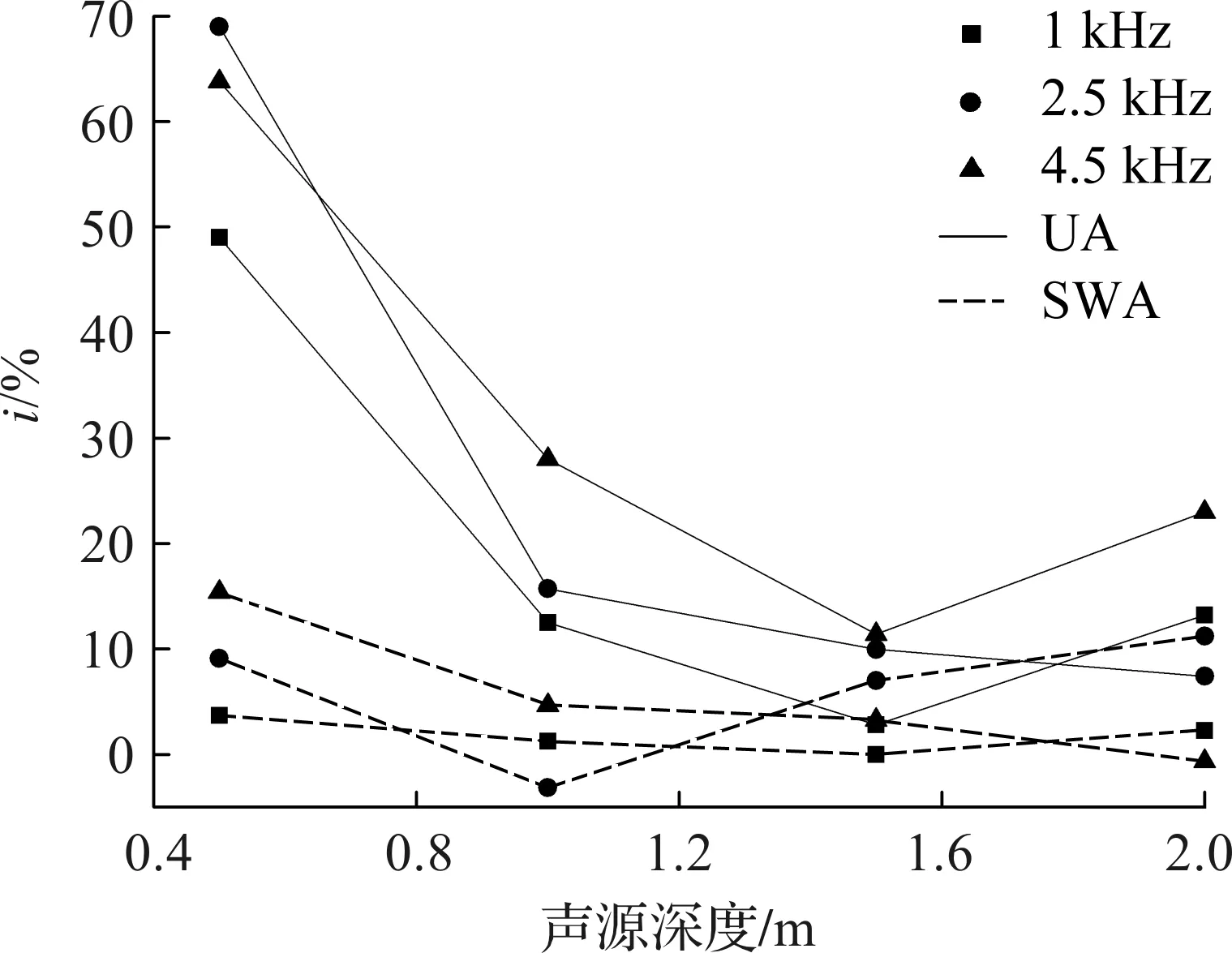
图10 伞型和轮辐的主瓣增加率(实验数据)Fig.10 HPBW increase rate of umbrella array and sector wheel array(experimental data)
4 结 论
通过伞型和轮辐两种阵列对单声源定位进行仿真与实验,得出以下结论:1) 伞形阵列能够区分阵列前侧和后侧的声源,突破了由于平面阵列的局限性;2) 在波束形成图的效果上,使用伞型阵列时得到的波束形成图的主瓣较大,旁瓣水平高,动态水平较低,对声源识别的准确度相对于轮辐阵列较差,同时对比两种阵列的主瓣宽度,以HPBW为指标,得到在声源深度小于0.95 m时,采用伞型阵列具有与B&K的轮辐阵列相似的声源定位效果。当声源深度大于1 m时,轮辐阵列的优势越来越大;3) 通过引入主瓣增加率i这一指标,伞型阵列在X方向的主瓣宽度较小,Y方向的主瓣宽度控制的较差,其原因是伞型阵列在X方向具有不对称性,在Y方向为对称结构,不对称性对缩小主瓣宽度具有明显优势。轮辐阵列为旋转对称,各方向为不对称性,所以轮辐阵列对X和Y方向的主瓣宽度都有很好的控制。
猜你喜欢
传感器世界(2022年3期)2022-11-24
钣金与制作(2022年10期)2022-11-12
舰船科学技术(2022年11期)2022-07-15
兵工学报(2021年2期)2021-04-08
电子制作(2019年23期)2019-02-23
北京汽车(2019年6期)2019-02-12
电子制作(2016年19期)2016-08-24
大自然探索(2014年11期)2014-09-10
演艺科技(2013年5期)2013-11-05
演艺科技(2013年2期)2013-09-19