
载货汽车在途监测系统的开发*
2019-05-15 03:24赵佳琪赵志刚郝亮李俊赵智杰
汽车实用技术 2019年9期
赵佳琪,赵志刚,郝亮,李俊,赵智杰
载货汽车在途监测系统的开发*
赵佳琪,赵志刚,郝亮,李俊,赵智杰
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
载货汽车的内轮差是造成重大交通事故的主要原因之一,对于其完全透明化设计研究保障行车安全显得至关重要。鉴于此,通过对载货汽车内轮差建模的研究,进一步确定内轮差范围,应用红外光电传感器对内轮差区域的状况进行采集,采用STM32单片机为控制核心,搭建系统的硬件及相应的控制电路对采集信息进行分析、处理,进行危险状况预警提醒。这套系统具有研发成本低、实用性强、能有效消除了转向内轮差视野盲区等优点,因此其具有很好的推广价值。
内轮差;行车安全;建模;红外光电传感器;STM32单片机
近年来,货车营运车辆造成交通事故的重要诱因之一是右转向内轮差。根据过去的2011全年国家统计数据表明,国内发生道路伤亡交通事故总共为210812件,其中死亡人数达到了62387人,而其中内轮差事故率为24%,事故总数达到了50297件,死亡人数为20649人,占死亡总人数的33.2%[1]。
本文采用单片机技术,通过搭建外围硬件,实现了对内轮差区域的信息的采集、分析与预警等功能,从而保证了货车右转内轮差盲区全覆盖,从而实现了货车右转内轮差区域“透明化”设计,保障车辆转弯安全性起到积极的作用。
1 内轮差理论研究
私家轿车及小型车辆的内轮差区域范围很小,几乎不影响汽车行驶的安全性,但是对于大型营运客货车辆来说30%事故都是由于内轮差视觉盲区造成的。表1当中给出了不同货车的内轮差具体数值。
如图1所示为单车右转向内轮差模型示意图,车辆的轮距为,分别为前右和后右轮。不计由于转弯离心力造成的轮胎形变与侧滑的影响。车辆右转过程中,点的速度V始终恒定,点轨迹为/2圆弧(半径为、圆心为)然后接直线段。如图1所示,以为坐标原点建立平面直角坐标系,并定义角处的内轮差(),是点轨迹和点轨迹沿相同方向的径矢之差为:

图1 单车内轮差的理论模型示意图
右转向内轮差最大值是:


点的运动速度与线段之间的角度应有对应以下关系式:
因此,由速度投影定理可知点的运动速度的按照投影定理得到分量方程式为:
从零时刻开始,对应的坐标点为(-,-),点的运动轨迹可由(5)式进行积分而得到,然后就能按照公式(1)计算出不同时刻右转的车辆内轮差具体数值。
图2为半挂车的右转向内轮差原理图,牵引头的轴距为1,车身的轴距为2,牵引头和车身由光滑轴相连,如果点沿着以O为圆心、半径是R的圆弧轨迹运动以建立的坐标系为基准,顺时针转动达到正向转角,而虚线表示的分别是的轨迹,实现表示的分别是右前轮和右后轮的运动轨迹。与点按照单车运动规律运动,点不同时刻的运动轨迹也可由(5)式求得。点的运动方向始终与平行,速度大小由投影定理得到。 对时间积分可得点在任意时刻的位置。、点轨迹差:

需要指出,d'并非最大内轮差,半挂车的最大内轮差应为和的轨迹之差:

2 系统总体设计
本系统总体设计框图如图3所示。以STM32单片机为主控制器[2],使用2个红外光电传感器进行右侧内轮差区域信号实时采集,送STM32单片机进行运算、处理,将报警信息在中文液晶屏上显示,通过语音提醒司机注意,对危险状况做出提前判断。
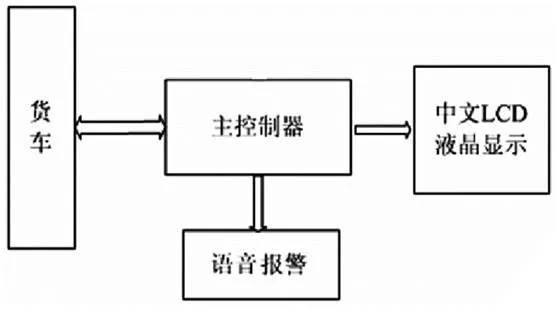
图3 系统总体架构
3 系统硬件设计
货车转向预警系统硬件设计是以单片机为核心,外围扩展电源供电模块、光电信号采集模块、中文液晶显示模块和语音报警模块等,选取的模块和电路相互协调、共同工作,来实现货车转向预警系统所需要的功能。系统硬件平台的模块框图如图4所示:

图4 系统硬件模块框图
4 系统软件设计
硬件由嵌入式C语言编写的主程序调用子程序来实现预定的功能,其流程图如10所示。采用模块化软件设计思路[3,4],编写各种模块的驱动的程序,比如语音模块、液晶屏等程序,通过J-LINK仿真器来进行程序的在线仿真和烧写程序。系统软件总体流程图如图5所示:

图10 系统软件总体流程图
5 结语
对于右转货车的转向内轮差区域,由于不同车型是不同的,通过分析几种典型车型基础上,确定其内轮差的大致的区域范围,同时也明确了为减少内轮差,应该尽可能大的转弯半径。此外,汽车右转时,驾驶员是通过车辆右侧后视镜观察路况的,为了减少视觉误差和观察误差应尽量降低车速。而本预警系统以单片机为核心控制单元,搭建货车右转向危险状态主动预警系统,实现了货车右转弯危险状况的实时、准确预警,以便消除内轮差产生视野盲区。大货车转向预警系统针对实际问题,实现低成本的车辆产品的研发是可行的。
[1] 沈艾中.大货车之殇—货运车辆交通事故高发的成因及对策[J].公安学刊, 2012(4): 85-89.
[2] 刘火良,杨森.《STM32库开发实战指南》[M].机械工业出版社,2013:78-92.
[3] 段了然,李雪莲等.基于ISD1700语音控制芯片的低成本公交车自动报站电路设计[J].电子技术与软件工程,2014,24(1):104-191.
[4] 任胜兵,邢琳.软件工程[M].北京:北京邮电大学出版社,2004: 132-143.
Development of on-the-road monitoring system for trucks*
Zhao Jiaqi, Zhao Zhigang, Hao Liang, Li Jun, Zhao Zhijie
( School of automotive and traffic engineering, liaoning university of technology, Liaoning jinzhou 121001 )
Inner wheels difference is the main one of many causes for traffic accidents when trucks turn to right. It is crucial to design it to hyalinize in order to ensure the safety of driving. In view of this, area of inner wheels difference can be confirmed based on modeling and it is collected through infrared electric sensor and STM32 single-chip computer is used as the core to build the hardware and the control circuit in order to analysis and manage collecting information so as to warn dangerous conditions. The system has an advantage of research and development low cost, strong practicability and eliminating blind area of difference of radius between inner wheels etc. So it is useful for adopting this system widely.
inner wheels difference;traffic safety;modeling;infrared electric sensor;STM32 single-chip computer
U463.44+4
A
1671-7988(2019)09-84-03
U463.44+4
A
1671-7988(2019)09-84-03
赵佳琪,就读于辽宁工业大学汽车与交通工程学院。
2018辽宁工业大学创新创业训练计划项目(201810154126)。
10.16638/j.cnki.1671-7988.2019.09.028
猜你喜欢
财会学习(2022年7期)2022-11-13
中国交通信息化(2022年7期)2022-10-27
重庆交通大学学报(自然科学版)(2022年9期)2022-10-09
现代青年·精英版(2022年3期)2022-04-06
新民周刊(2021年46期)2021-12-18
医学食疗与健康(2021年27期)2021-05-13
环球时报(2019-12-30)2019-12-30
数学大王·低年级(2019年12期)2019-08-14
为了孩子(孕0~3岁)(2001年14期)2001-08-07
